
五自由度人-车-路耦合模型振动分析
2014-10-28 02:53解文辰时培成
井冈山大学学报(自然科学版) 2014年3期
解文辰,李 震 ,时培成
五自由度人-车-路耦合模型振动分析
*解文辰,李 震 ,时培成
(安徽工程大学机械与汽车学院,安徽,芜湖 241000)
通过人-车-路三者相互作用的关系,建立了五自由度人-车-路耦合振动模型;利用牛顿法建立五自由度人-车-路模型的振动微分方程,运用MATLAB/SIMULINK软件对数学模型进行转化获得仿真模型。基于行驶车速和路面不平度激励,分析了五自由度耦合模型系统的振动特性,给出了相应变量的位移、速度和加速度响应曲线。研究成果对汽车的乘坐舒适性分析具有一定的指导意义和参考价值。
五自由度振动模型;随机路面模型;耦合振动;乘坐舒适性
1 五自由度振动模型及其振动微分方程的建立
当汽车行驶在凹凸不平的路面时,汽车的振动会使乘坐人员感觉舒适性差,当振动到一定程度,甚至会影响到乘坐安全性[1-2]。而汽车平顺性指的是使汽车在一般车速行驶过程中产生的振动和冲击环境对乘员舒适性的影响在一定界限之内。所以汽车振动不但会影响乘员的乘坐舒适性和驾驶员的驾驶疲劳,而且对汽车上的各个零件也有损害[3-4]。因此,对汽车的平顺性研究非常重要。本文针对五自由度人-车-路耦合振动模型进行平顺性仿真分析,本文首先建立了人-车-路五自由度模型的振动微分方程,然后运用SIMULINK软件将建立的五自由度数学模型转化为仿真模型,运用软件操作,使所建立的五自由度耦合模型模块化、参数化,通过运动仿真,呈现车身及人-座系统的振动加速度、悬架动挠度和车轮动位移等响应曲线,并给出目标车辆的振动特性评价。
1.1 耦合系统振动模型
建立汽车耦合系统振动模型时,考虑到需分析目标车辆的垂向振动响应,并确定影响因素的主次顺序,将模型进行适当的简化,建立反映人-车-路相互作用关系的五自由度耦合振动模型。
1.1.1 基本假设
在建立五自由度耦合振动模型之前,我们应该做出如下假设[5-7]:
1)车身、发动机、车架、前后轴为刚性,车身、车架为刚性连接;2)车辆结构相对于中垂直面对称,左右路面轮廓相同,只考虑垂直方向振动和纵向角振动;3)车辆悬架刚度、轮胎刚度、座椅刚度均为位移的线性函数,悬架阻尼、座椅阻尼为相对速度的线性函数;4)轮胎与路面保持接触,无弹跳;5)路面位移输入函数作用在轮胎与路面的接触面中心点上。
1.1.2 五自由度耦合振动模型
根据以上假设,建立的人-车-路五自由度耦合振动模型如图1所示。其中z1前车轮垂向位移;z2后车轮垂向位移;z车身垂向位移;z5人椅系统垂向位移;车身的俯仰角;qf前轮路面随机输入;qr后轮路面随机输入。模型中其余参数的物理意义如表1所示。

图1 五自由度整车模型

表1 模型参数表
1.2 五自由度振动模型的振动微分方程
根据图1,利用牛顿法,可得到五自由度振动模型的振动微分方程式为[8]:

式中,质量矩阵:

刚度矩阵:

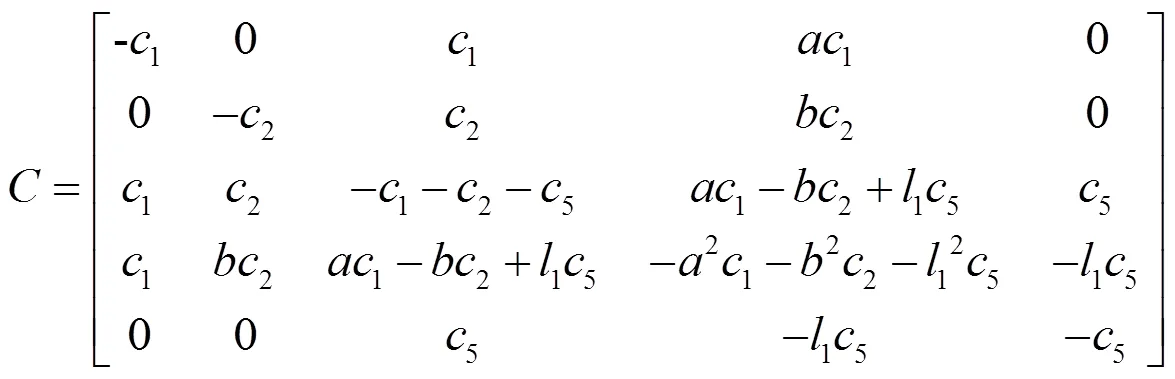
阻尼矩阵:
为了便于仿真将公式(1)改写成如下式状态空间的形式:

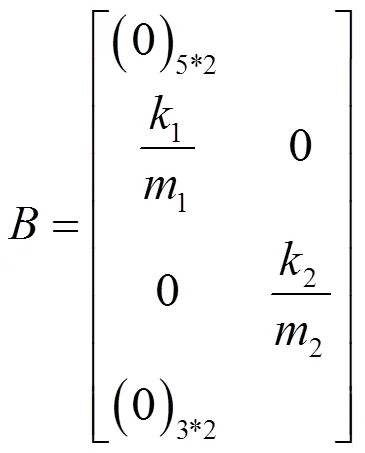
因为路面激励对输出无直接作用,所以


2 路面模型的建立
2.1 路面不平度的空间描述
沿着车辆的行驶方向,路面不平度指的是道路表面对于理想平面的偏离,它具有影响车辆动力性、行驶质量和路面动力载荷三者的数值特征。大量的测试分析结果表明,路面不平度具有随机、平稳和各态历经的特性,可用平稳随机过程理论来分析描述。功率谱密度函数能够表示路面不平度能量在空间频域的分布,它刻画了路面不平度即路面波的结构。根据国际标准化组织文件ISO/TC108/SC2N67/中提出的“路面不平度表示方法草案”和国内由长春汽车研究所起草的《车辆震动输入—路面平度表示》(GB7031)标准,用路面功率谱密度表达路面不平度,其拟合表达式:

式中:的带宽为(1,2),1和2分别为有效频率的上限和下限;1=0.1 m-1为参考空间频率;G(0)为参考空间频率0下的路面功率谱密度,称为路面不平度系数,其值取决于道路的路面等级;为频率指数,为双对数坐标上斜线的频率,它决定路面功率谱密度的频率结构。按路面功率谱密度的量度把路面不平度分为8级。分级的频率指数=2。
2.2 路面不平度的时间描述
在空间频率功率谱描述中,没有速度影响因素出现。但对于汽车振动系统而言,车速是必须要考虑的一个因素。当汽车以车速驶过空间频率为的路面时,等效的时间频率 (Hz)为

且时间频率功率谱密度和空间频率功率谱密度关系为

所以,时间频率功率谱密度



路面不平度是汽车行驶时最主要的激励,在汽车平顺性和操作稳定性仿真分析中,路面输入模型能否准确地反映实际研究路面的特征对分析研究的准确性有着决定性的影响,所以建立准确的路面模型是进行汽车平顺性和操纵稳定性研究首要解决的问题。
3 五自由度仿真模型的建立
路面一般分为8个等级,在8个等级的中,B级路面更接近现实路面,选择B级路面作为测试路面。前后轮的路面谱输入时间间隔t=L/v= 0.138 s,利用SIMULINK中的SUBSYSTEM CREATER分别将前后轮的路面函数创建成子系统。在continuous子模块中选择STATE-SPACE模块将状态方程参数化,在STATE-SPACE的PARAMETERS选项中输入A,B,C,D的值,再从SINK子模块中选择SCOPE模块作为显示器,最后连接各个部件。其中A,B,C,D参数设置需要进行m-file编程。最终在SIMULINK中的建立的五自由度人-车-路耦合振动仿真模型如图4所示。该仿真模型可以实现前后轮、车身垂直方向运动及俯仰运动仿真,得出相应的位移、速度及加速度时域响应变化曲线。
4 五自由度耦合模型的平顺性仿真及分析
B级路面在不同车速下(30 m/s,50 m/s)的车身加速度曲线和人椅系统加速度曲线如下。

图5 车身加速度曲线30m/s

图6 人椅系统加速度曲线30m/s
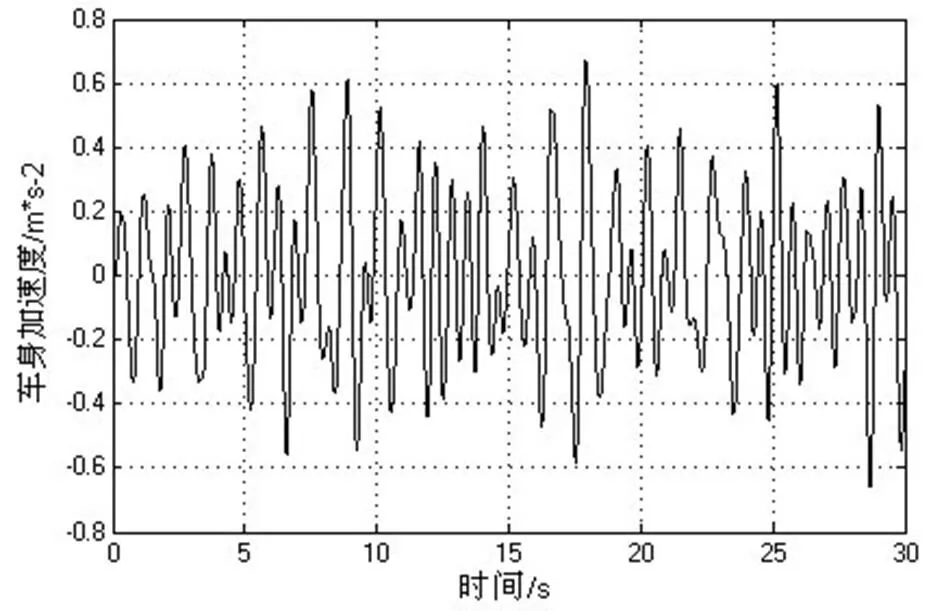
图7 车身加速度曲线50m/s

图8 人椅系统加速度曲线50m/s

图9 五自由度前悬架动挠度曲线(30m/s)

图10 五自由度后悬架动挠度曲线(30m/s)

图11 五自由度前悬架动挠度曲线(50m/s)

图12 五自由度后悬架动挠度曲线(50m/s)

图13 五自由度前轮胎动位移曲线(30m/s)
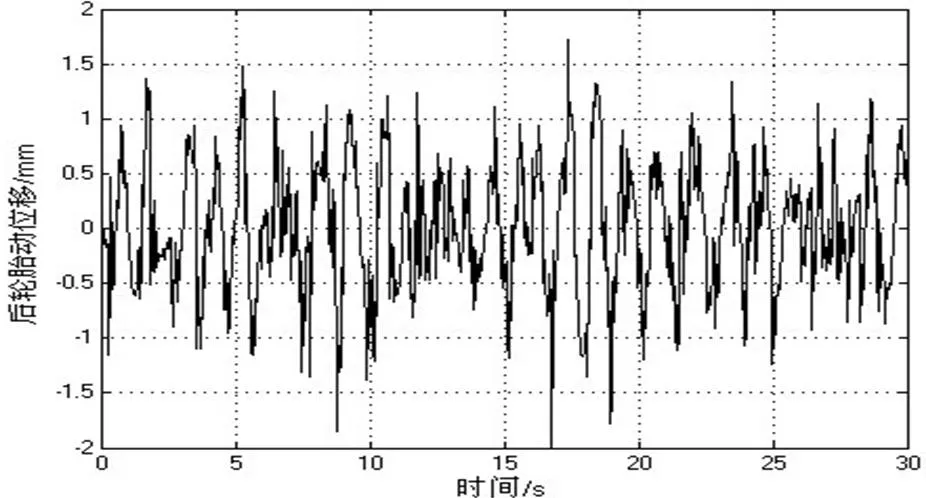
图14 五自由度后轮胎动位移曲线(30m/s)

图15 五自由度前轮胎动位移曲线(50m/s)

图16 五自由度后轮胎动位移曲线(50m/s)
根据图5~8,随着车速的增加,驾驶员加速度幅值和均方根值都增加,车速增加也使得前轮和后轮动位移稍有增加,人的舒适程度稍有降低,但是都在舒适性的范围内,故对汽车操纵稳定性没有太大的影响。仿真的结果表明车型的参数选定是合理的。
悬架动挠度也是评价汽车行驶平顺性不可忽略的重要指标[9-10]。由图9~16可看出,虽然车速增加,但前悬架和后悬架动挠度变化不大,而且动挠度的峰值依然在限位行程之内。仿真的结果表明车型的参数选择的合理性。
5 结束语
通过人-车-路三者相互作用的关系,建立了五自由度人-车-路耦合振动模型,然后运用SIMULINK软件将建立的五自由度数学模型转化为仿真模型,实现了从实体化到参数化的转变。基于所建立的模块化、参数化的五自由度耦合模型,分析了行驶车速和路面不平度激励对车辆振动特性的影响,由此所得到的车身及人-座椅系统的振动加速度、悬架动挠度和车轮动位移等响应曲线,从而给出目标车辆的振动特性评价。
[1] Yildirim S, Eski I. Vibration analysis of an experimental suspension system using artificial neural networks[J].Journal of Scientific & Industrial Research,2009,6(8):522-529.
[2] Feng J Z, Yu F, Zhao Y X. Design of a Band width-limited Active Suspension Controller for Off-Road Vehicle Based on the Co-simulation Technology[J].SAE paper, 2008(1):1067.
[3] 张春红.基于MATLAB的汽车振动系统仿真[J].机械工程与自动化,2008,4(2):83-84.
[4] 陈士安,何仁,陆森林.汽车平顺性评价体系[J].江苏大学学报:自然科学版,2006,5(3):223-229.
[5] 严世榕.影响汽车振动特性的几个参数研究[J].机械强度,2006(3):22-25.
[6] 倪晋尚,阮米庆.车辆的平顺性优化及仿真实验[J].现代机械,2006(2):8-10.
[7] 陈翠彪.基于多人载的汽车三维动力学平顺性仿真分析[D].合肥:合肥工业大学,2007.
[8] 姜鹏.汽车悬架系统的仿真分析与参数优化设计[D].杭州:浙江大学,2006.
[9] 方义.轮毂电机直接驱动对汽车平顺性的影响[D].长春:吉林大学,2012.
[10] 弓振鹏.电动轮汽车半主动悬架建模仿真及平顺性研究[D].武汉:武汉理工大学,2012.
THE VIBRATION ANALYSIS OF FIVE DEGREES OF FREEDOM MAN-VEHICLE-ROAD COUPLED MODEL
*XIE Wen-chen,LI Zhen ,SHI Pei-cheng
(School of Mechanical and Automotive Engineering, AnHui Polytechnic University, Wuhu, Anhui 241000, China )
The 5-DOF man-vehicle-road coupled vibration model was established by the relationship among three interactions of man-vehicle-road, and the vibration differential equation of the 5-DOF man-vehicle-road model was obtained by Newton’s method. The mathematical model was conversed into the derived simulation model based on MATLAB/SIMULINK software. The vibration characteristics of the 5-DOF couple model were analyzed by the excitations of ride speed and random road surface roughness time series after the corresponding parameters were set. We also gave the acceleration curves and its response characteristics of the bodywork and man-chair system. The study results have a guiding significance and reference value to analysis the vehicle ride comfort.
5-DOF vibration model; random road model; coupled vibration; ride comfort
U461.4
A
10.3969/j.issn.1674-8085.2014.03.017
1674-8085(2014)03-0075-06
2013-04-16;
2014-04-02
安徽省教育厅自然科学基金重点项目(KJ2012A37)
*解文辰(1989-),男,安徽宿州人,硕士生,主要从事现代设计理论与方法的研究(E-mail:xwenchen@126.com);
李 震(1963-),男,安徽六安人,教授,博士,主要从事机械设计理论及方法、摩擦学、CAD方面的教学和研究(E-mail:lizhen@ahpu.edu.cn);
时培成(1976-),男,安徽六安人,副教授,博士,主要从事汽车系统动力学,汽车振动分析和测试技术研究(E-mail:shipeicheng@ahpu.edu.cn).
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
农业知识(2021年19期)2021-10-16
装备制造技术(2020年2期)2020-12-14
今日农业(2019年12期)2019-08-15
青岛画报(2017年12期)2018-02-06
商周刊(2017年22期)2017-11-09
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
汽车维护与修理(2014年10期)2014-02-28
上海金属(2013年4期)2013-12-20
