基于融合策略的单幅图像去雾算法
2014-10-27 11:53:56郭璠唐琎蔡自兴
通信学报 2014年7期
郭璠,唐琎,蔡自兴
(中南大学 信息科学与工程学院,湖南 长沙 410083)
1 引言
日常生活中所拍摄的图像极易受到大气中尘、雾、烟等悬浮颗粒的影响,从而导致图像的对比度下降、颜色等特征也受到衰减。由此产生的降质图像往往缺乏视觉生动感,且场景对象的能见度较低。进行去雾处理的目的就是要复原雾天场景的细节信息,增强图像的清晰度和真实感,因而去雾算法在许多领域都具有广泛应用。例如在计算机视觉领域,大多数的室外监控系统、智能车辆以及对象识别工作都需要准确提取图像特征,但雾、霾等恶劣天气往往极大地限制和影响了系统效用的发挥和相关工作的正常进行。对于日常照片处理而言,雾气的存在降低了所拍摄图像的对比度,从而给拍摄者带来了较大的困扰。此外,在航拍和卫星遥感领域,所拍图像的质量也极易受到各种悬浮颗粒的危害[1]。因此,如何自动、实时地消除雾气对图像中场景目标的影响具有重要的理论研究意义和实际应用价值。
许多学者对此展开了研究,提出了相关去雾算法,这些方法主要分为2类:一类是基于图像处理的图像增强方法,另一类是基于物理模型(主要是大气散射模型)的图像复原方法。经典的雾天图像增强方法主要包括直方图均衡化、同态滤波、小波变换、Retinex算法。而雾天图像复原方法则主要是研究雾天图像退化的物理机制,建立雾天退化模型、反演退化过程以获得未经干扰退化的无雾图像或无雾图像的最优估计值。复原方法通常是利用不同散射光的偏振特性[2],交互式景深估计[3],或利用多幅不同天气状况下的同一场景图像[4],这些方法均取得了较好的效果。近年来,针对单幅图像的去雾取得了较大进展。这方面的早期工作是由Fattal[5]完成的,随后又有许多研究者提出了各自的单幅图像去雾方法[6~8]。如 Tan 利用最大化复原图像的局部对比度来达到去雾的目的[6]。He 等人提出的基于暗原色原理的去雾方法[7]建立在暗原色先验知识上,通过精细化抠图处理以达到很好的去雾效果。Tarel提出的基于快速中值滤波的去雾方法[8]利用中值滤波的变形形式估计大气耗散函数,在此基础上结合大气散射模型复原图像视觉效果。上述这些工作或是从物理成因,或是从经验统计的角度,利用相关先验知识以达到有效去雾的目的。
本文提出了一种基于融合策略的单幅图像雾天增强算法,该算法仅依靠单幅有雾图像即可估算出相关的输入图与权重图以进行有效的去雾处理,整个过程无需借助任何物理模型。最终去雾效果的好坏主要取决于算法是否选取了合适的输入图与权重图。所提算法首先将原有雾图像进行白平衡处理以获取消除了色偏的第一幅输入图。第二幅输入图则采用对比度变换方法以提高整幅图像的对比度。算法定义的权重图通过确定空域像素间的关系来对相关图像的特征进行评估,其中某些像素被赋予较大的权重值,目的是为了准确描述所期望的图像特征。最后,去雾过程采用多分辨率、多尺度的融合方式以避免给最终的去雾结果造成光晕伪影。与已有去雾方法相比,所提算法主要具有以下2个特点。①该算法采用逐个像素点计算的方式,这就比已有多数去雾算法所采用的逐个图像块计算的方式更为有效。这主要是因为基于图像块的方法认为各个图像块内的大气光值恒定。当此假设不满足时,需要进行额外的图像后处理以消除最终去雾结果中的光晕伪影,恰当的逐点计算方式则不存在这一问题。②算法的复杂度低、处理速度较快,能基本满足实时应用的需求。相比于已有的传统增强方法,本文方法所求取的去雾图像具有较好的清晰度和色彩自然度,如图1所示。
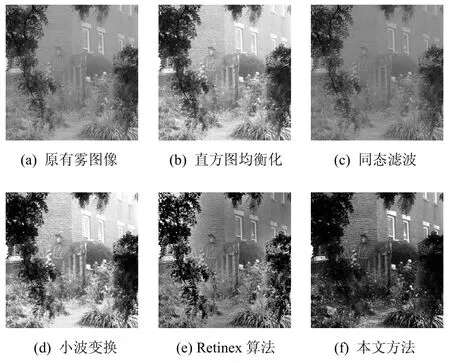
图1 与传统增强算法的去雾效果对比
2 基于融合策略的去雾算法
2.1 去雾算法流程
所提算法的主要思想是通过一种简单、快速的方式来增强各种雾天场景的清晰度。尽管该方法没有依据专门的光学模型,但是通过将综合考虑后选取的输入图与权重图相融合,此方法能够有效地克服基于物理模型方法所存在的局限性。具体而言,所提方法主要有3大步骤:首先从白平衡和图像亮度、对比度这2个方面求取原有雾图像的输入图;其次,获取2幅输入图所分别对应的雾气遮罩权重图、显著性权重图和曝光度权重图;最后将所求取的2幅输入图与其对应的权重图进行多尺度融合,从而得到最终的去雾图像。图2即给出了基于融合策略的去雾算法流程。
2.2 融合策略的输入图
当应用融合策略时,选取合适的输入图和权重图是保障最终去雾结果具有较好的清晰度的关键。图像融合去雾的核心在于将相关处理结果与输入图相结合,以保留图像最为重要的特征。由此,即可使由融合策略所获取结果的每一区域,都至少在一个输入图中展现出最为理想的效果。在所提去雾算法中,融合过程所需的2个输入图均来自原有雾图像。其中,第一幅输入图利用白平衡处理消除了原图像的色偏,而第二幅输入图则是通过对原图像进行变换以增强图像的对比度。
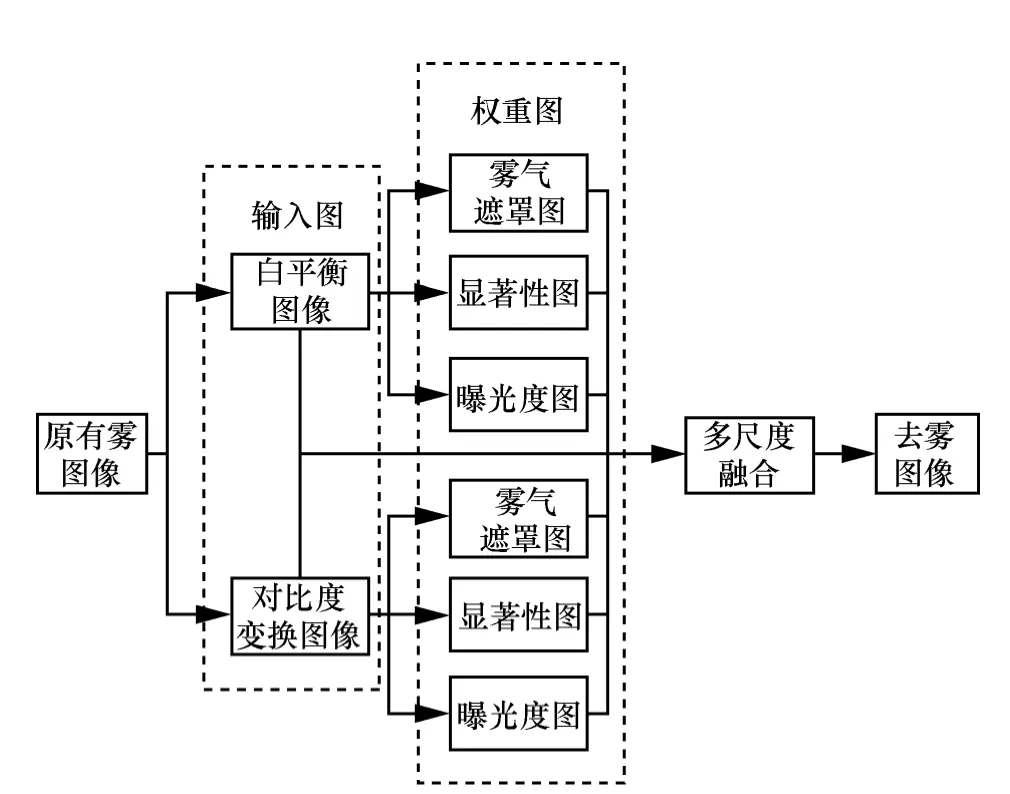
图2 基于融合策略的去雾算法流程
对于白平衡处理输入图而言,进行白平衡操作的主要目的是通过消除由大气光所引起的色彩偏差,以改善图像的外在观感。对于一幅图像来说,物体被人眼观测到的颜色不仅仅是由其反射特性所决定的,还取决于射向物体的光线的颜色。为了去除光源因素对物体颜色的影响,以获得物体在某一经典光源下的颜色,就需要采用白平衡算法以达到这一功能。从广义的角度上讲,白平衡算法的目的就是将在未知光源下拍摄的物体颜色,转换成在经典光源下的物体色彩,从而达到色彩的一致性。本文方法采用了文献[8]所提出的白平衡处理方法。对于雾气分布均匀的图像,采用全局白平衡方法。具体做法为首先求取图像各像素在R、G、B三颜色通道中的最小值,再求取上述最小值序列的0.99分位数,据此得到此最小值序列中大于该分位数的相关像素的横、纵坐标位置,再按此坐标得到三颜色通道中相关位置的像素值。然后对这三列所选像素值分别按列求取其均值,并对其进行规一化。最后将原图像三颜色通道各像素值分别除以此规一化后的像素均值,从而得到全局白平衡处理后的图像。例如对于图3(a)所示的有雾图像,其全局白平衡处理结果如图3(b)所示。而对于雾气、光照分布不均的图像,则采用局部白平衡方法。该方法通过中值滤波、参数调节、三通道均值计算等方式获取消除色偏后的白平衡结果。例如对于图3(c)所示的有雾图像,其局部白平衡处理结果如图3(d)所示。在实际计算中,仅仅依靠白平衡获取原图像的输入图仅能在一定程度上解决图像的色偏问题,因此还需要利用另一输入图来提高原图像在有雾区域的对比度。
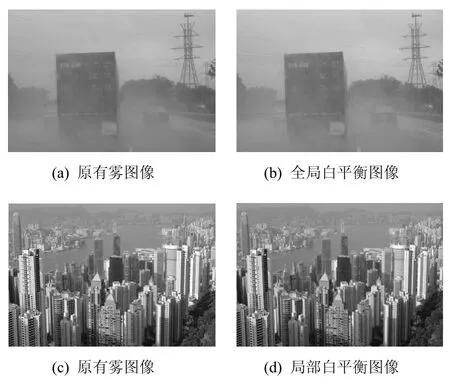
图3 原有雾图像及其白平衡处理结果
对比度变换输入图是由对源图像进行对比度拉伸操作得到的图像,该操作可增强图像有雾区域的对比度。所提算法主要采用自适应对比度拉伸方法来自动增强图像对比。在实际计算中,为调整图像各像素值,c∈{r,g,b},按照如下方式对其进行处理

其中,a和b为像素值的下限和上限。实际运算中a 和 b的值分别为0和 255。而对于 Tlow和 Thigh,这2个阈值的选取,则是根据积累分布直方图采用自适应的方法进行计算,其过程如式(2)所示。
其中,C(Im)为原有雾图像的积累直方图。阈值 Th通过确定Tlow和Thigh以调整最终图像的像素值。对于本文中的所有实验结果该值均设为0.02。对于彩色图像而言,为了保持正确的颜色比例,在进行对比度拉伸时 3个颜色通道上采用了相同的 Tlow和Thigh值。图4(b)和图4(d)分别为对原有雾图像图4(a)和图4(c)进行自适应对比度拉伸处理后得到的输入图结果。从图中可以看出,将自适应对比度拉伸应用于图像去雾,与直方图均衡化等传统的图像增强方法类似,尽管可以改善最终结果的整体对比度,但却无法消除图中远处较浓的雾气。因此,还需要在融合过程中采用下述权重图以增强图像雾气较浓区域的细节信息。
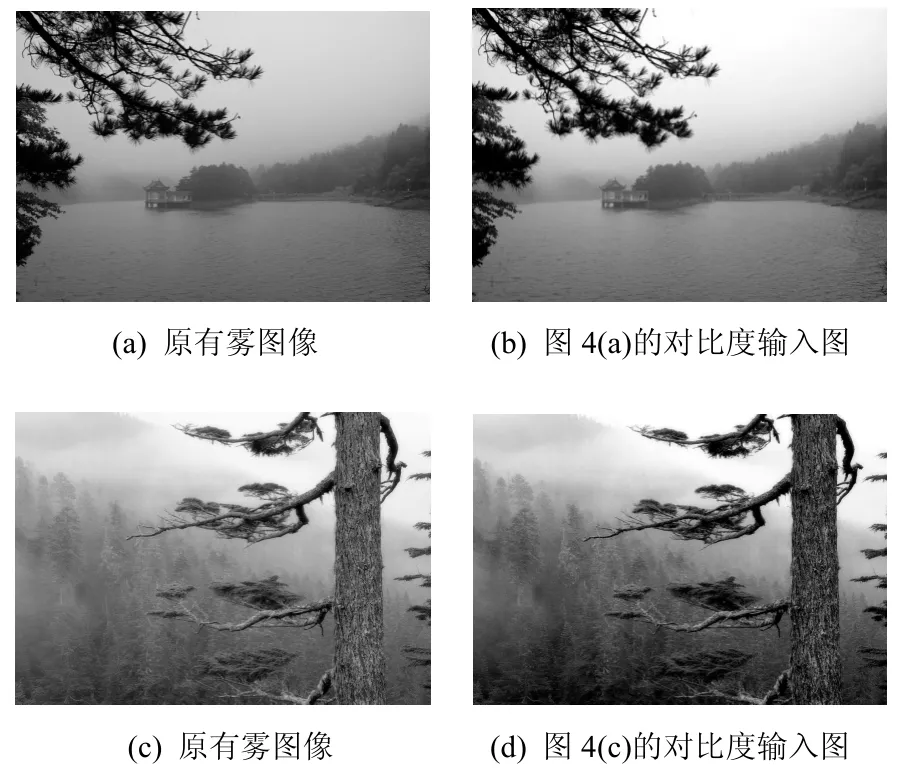
图4 原有雾图像及其对比度变换结果
2.3 融合策略的权重图
权重图的选取主要取决于复原处理最终所想达到的理想效果。由于雾天图像所体现的雾气浓度、显著性及曝光度是其最为本质的特征。对于一幅增强效果较好的去雾图像而言,其必然应受到尽可能少的雾气影响,同时人眼所关心区域的显著性得到了突显,且图像的整体曝光度也较为适度。因此,上述3个方面能够较好地涵盖图像的本质特征。
首先,对于雾气遮罩权重图(WF)而言,该权重图通过采用 Retinex算法在输入图的 R、G、B三颜色通道上进行相关操作来衡量图像场景的雾气浓度。从人眼视觉感知的角度来说,雾气浓度是雾天图像最为显著的特性,求取雾气遮罩权重图的目的就是要在最终处理结果中消除雾气的影响。具体做法是:定义F(x,y)为标准差为σ的高斯低通平滑函数,首先将输入图与此平滑函数进行卷积运算以获得原图像的亮度分量图像,这一过程可表示为
其中,K为归一化常数,σ为标准差,其大小决定了平滑的程度。假设平滑函数采用w×w的窗口,则K的取值应满足使函数F(x,y)的和为1的约束条件。然后通过计算此亮度图像的均值,即可获得反映雾气浓度的雾气遮罩。这样计算出来的遮罩,在场景雾气分布较为均匀时,可以作为对雾气浓度的合理估计[9],例如图 5(b)即为雾气分布较为均匀的原有雾图像图5(a)的雾气遮罩图。但是,在实验中也发现对于许多雾气分布不均的图像,若仍采用此种方式就会得到错误的雾气遮罩估计结果,例如图5(d)即为雾气分布不均的原有雾图像图5(c)的雾气遮罩。由此可见,此种情况下的雾气遮罩还应与图像的景深相关。为了体现当前场景的深度信息,将该均匀遮罩与相关输入图Ik相乘,再进行适当的修正,以结合输入图 Ik来求取反映当前各景深雾气浓度的遮罩图,该过程可描述为
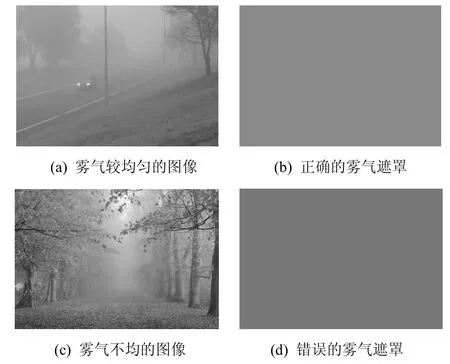
图5 原有雾图像及其对应的雾气遮罩图

由于图像的亮度反映了图像不同景深处所接收到的光子量。若场景点与拍摄点越远,则传感器所能接收到的光子量越少,从而导致图像远端的雾气越浓,亮度越暗。因此雾气遮罩权重图所反映的雾气浓度信息可通过图像的亮度信息来衡量。由此提取L′(x,y)的亮度分量作为最终的雾气遮罩权重图。对于一幅雾天图像而言,其雾气遮罩图中较小的像素值,一般对应图像远端相对较浓的雾气。因此在后续融合处理中,通过相关图像的乘积运算,即可达到消除雾气影响的目的。
其次,对于显著性权重图(WS)来说,该权重图主要用于突显在雾天场景中失去原本显著性的可识别对象。同时,显著性权重图也体现了人眼所关注区域与其临近区域的显著区分度。为了衡量输入图的显著性,本文采用了Achanta所提出的显著性区域检测算法[10]。该算法基于图像空间频域的分析,通过叠加多个基于高斯函数的带通滤波器得到。在此算法中,图像的显著值定义为S(x,y)=d(Iu-Iω)。其中Iu为图像的特征均值,Iω为高斯卷积后的图像,d为欧氏距离平方。这里采用该算法不仅因为其计算效率高,还因为其所生成的显著性权重图具有较好的边缘保持特性。由于显著性权重图提高了图像高光及阴影部分的对比度,因此该权重图的主要作用是增强了相关输入图的整体对比度。
对于曝光度权重图(WE),此权重图主要用于评估图像各像素的曝光是否适度,同时为保持图像局部对比度的自然观感提供了评估度量。一般而言,当像素的规范化权值接近于0.5时,此像素将会在结果中显示出较高的曝光度。曝光度权重的求取公式可表示如下

其中,Ik(x,y)为输入图像 Ik在各像素点(x,y)处的亮度值。标准差σ被设定为0.25。曝光度权重图将较高的权重值赋给高斯模型距离接近于0的像素区域,而那些距离相对较大的像素区域,则视为过曝光或欠曝光区域。由此,即可通过此权重图调整上述显著性权重图的处理结果,进而生成具有较好复原效果的融合图像。同时,为了生成一致的处理结果,限定各权重图W在各像素点处的权值和为1,由此定义了规范化的权重值。一般地,对于输入k来说,其规范化权重图为。图6即给出了相关输入图的3个权重图示例,注意到权重图中较大的像素值表明该像素将会在最终的去雾图像中优先突显。图像复原效果还与图像的色彩紧密相关,若只将上述这3个衡量因素以权重图的形式进行简单地混合,有可能会导致最终结果颜色失真。因此,需要将输入图与权重图进行多尺度融合以获得色彩较为自然的去雾结果。
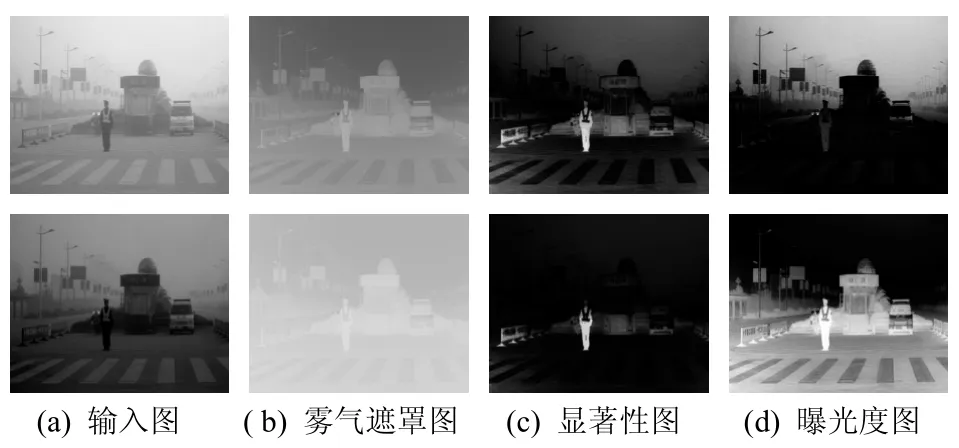
图6 由原有雾图像所得到的输入图及其相对应的权重图
2.4 多尺度融合
将图像每一像素点(x,y)处所定义的输入图与权重图相融合即可得到最终的雾天增强图像R(x,y),该过程可表示为[11]

其中,Ik代表输入图,为其所对应的 3个规范化的权重图。其中k为输入图的编号(k=1,2),K为输入图的数量,在所提算法中K=2。从图 6中可以看出,由原有雾图像所求取的2幅输入图可分别获得雾气遮罩权重图、显著性权重图和曝光度权重图这三组图像。若将每组中分别对应 2幅输入图的 2幅权重图进行规范化操作,使这2幅权重图中每一像素点(x,y)的像素值均满足这一条件,即可得到规范化权重图。但是若直接采用式(7)对相关输入图和权重图进行融合处理,将有可能会在权重图间的尖锐变换处给最终的处理结果带来光晕伪影问题。为了避免这一问题,采用经典的多尺度金字塔精细化策略[11]来进行融合操作,以达到去雾过程不引入光晕伪影的目的。
所提算法采用拉普拉斯金字塔将输入图分解为不同尺度的图像。对于规范化权重图,则采用高斯金字塔对其进行计算。考虑到高斯金字塔和拉普拉斯金字塔具有相同数目的分解级数,因此,拉普拉斯输入图与高斯规范化权重图的混合在每个级数上独立展开,以生成最终的融合金字塔。此融合处理过程如下式所示

其中,l为金字塔的等级数目,实验中此级数l均设置为3。k为输入图像的编号。L{I}表示对相关输入图I进行拉普拉斯金字塔操作,而表示对规范化权重图进行高斯金字塔操作。两金字塔操作均是采用由底至上的方式,在金字塔的每一级分别按(8)式进行计算。由此,即可分别得到针对2输入图的融合结果,如图7(b)和图7(c)所示。最后,将上述2幅融合图像的每一像素进行点乘操作以获得最终的去雾复原图像 Rl,即 Rl(x,y)=。图7(d)即为采用所提融合方法对原有雾图像图 7(a)的最终增强效果。从图中可以看出,相比于对比度变换输入图(如图6(a)所示),图7(d)不仅清晰化效果更为明显,且颜色也更为自然。由于去雾本质上就是对比度增强,只是由于雾的浓度与景深成正比,因此有别于一般的对比度增强,需要估计出每个点的景深以便确定增强系数。所提融合策略即借助权重图将原图像的景深信息与对比度变换相结合,因此能取得比单纯采用均衡化等传统增强方法更好的去雾效果。
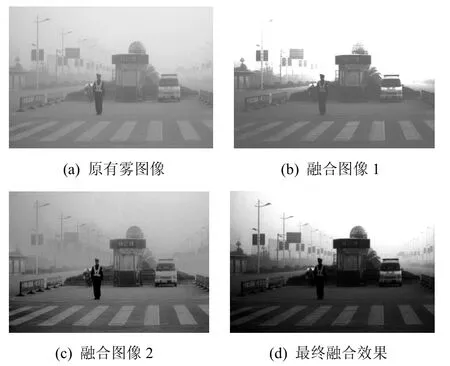
图7 多尺度融合策略
3 实验结果与性能分析
3.1 对比分析
为了验证算法的有效性和实用性,采用MATLAB在Pentium(R)D,3.00 GHz,2 GB内存的PC机上对大量雾天图像进行了对比性实验。
实验选取了直方图均衡方法、Tan提出的基于局部对比度最大化的去雾方法[6]、He提出的基于暗原色原理的去雾方法[7]以及 Tarel提出的快速去雾方法[8]与所提方法进行对比。选取上述这些方法的原因是均衡化算法是图像增强方法的典型代表,而Tan方法、He方法和Tarel方法则是目前去雾效果较好的基于光学模型的代表性算法。
图8即给出了直方图均衡化方法与本文算法对薄雾图像的去雾效果对比。从该图中可以看出本文方法的清晰化效果更为突出,去雾后的颜色也更为自然。图 9为本文算法与Tan方法[6]的去雾效果对比。Tan方法的去雾结果在颜色上往往过于饱和,例如图9中Tan方法结果就给人整体颜色偏黄的感觉,且去雾结果存在光晕伪影问题。图10为本文算法与He方法的去雾效果对比。从该图中可以看出,He方法由于场景对象(如路面)的颜色与大气光近似,致使暗原色原理失效,进而导致大气散射模型中的传播图估算错误。因此对于该图,He方法的去雾效果,尤其是对天空区域的处理并不理想。相比之下,本文方法的去雾结果自然、视觉效果改善明显。图11给出了本文算法与Tarel方法[8]的去雾效果对比。由图可知,针对此雾天图像,Tarel方法处理结果的细节增强效果显著,但在颜色上有所失真且常常伴有光晕伪影现象。处理结果则不存在这些问题。图12和图 13为本文算法与上述各去雾方法对雾天图像的去雾效果对比。实验结果表明,均衡化方法在增强图像细节的同时也突显了图像的噪声。基于光学模型方法中的Tan方法,其去雾结果往往存在严重的颜色失真。He方法在处理场景对象颜色与大气光类似的情况时效果较差。Tarel方法在大雾情况下的去雾效果不太明显且往往会出现光晕伪影现象。对于如图12和图13所示的场景对象与大气光颜色类似或存在大片天空区域的雾天图像,本文算法的整体视觉效果与Tan方法较为接近。而对于其他类型的雾天图像(如图8和图 9所示),本文方法的处理效果则与He方法较为接近。同时,实验表明本文方法不受暗原色原理成立条件的限制,在色彩自然度、细节还原、噪声抑制等方面也都要优于均衡化方法,且无Tan方法和Tarel方法的光晕伪影现象出现。
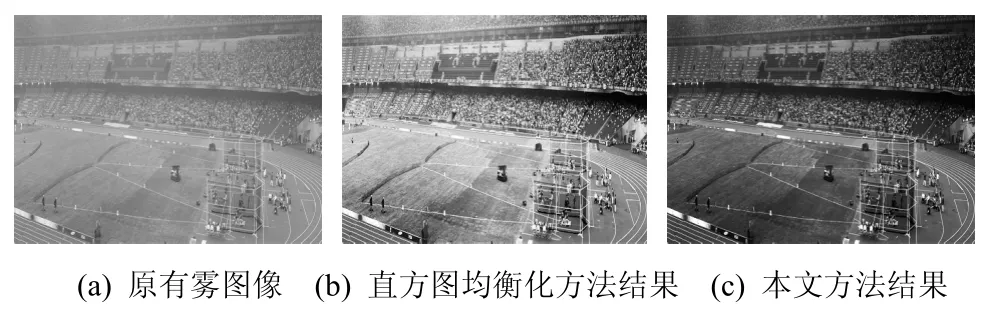
图8 与直方图均衡化方法的对比
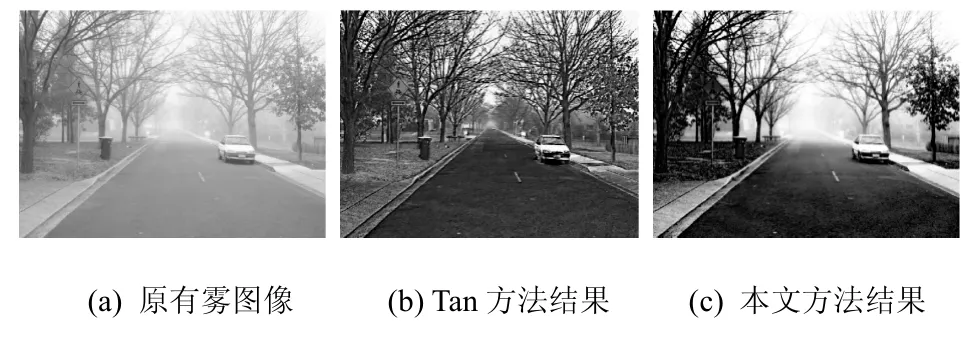
图9 与Tan方法的对比
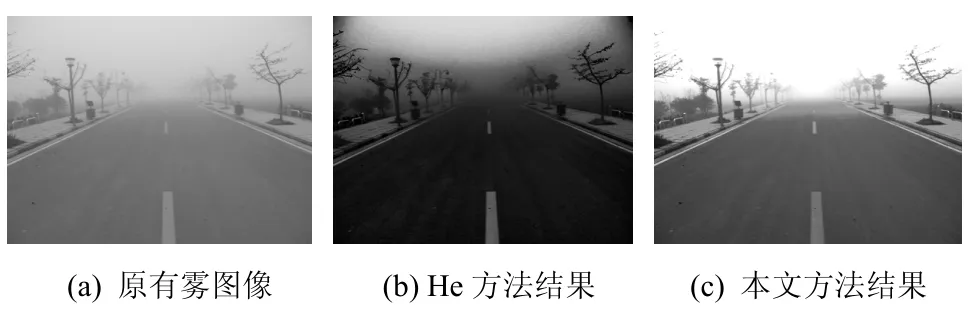
图10 与He方法的对比

图11 与Tarel方法的对比
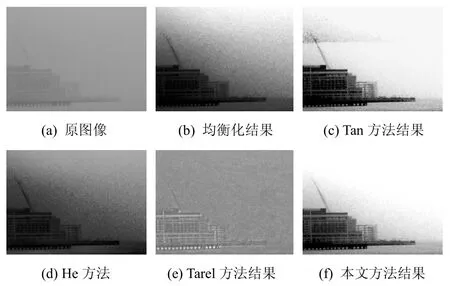
图12 与各去雾方法的结果对比1
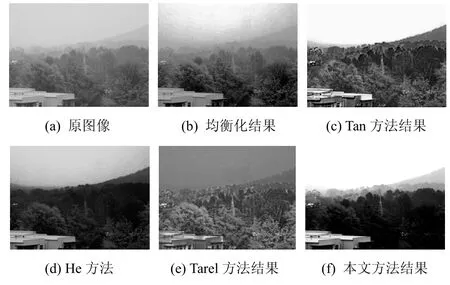
图13 与各去雾方法的结果对比2
由此可见,相比于均衡化方法和基于光学模型的去雾方法,所提融合方法的清晰化效果较为明显,能够得到对比度、色彩和细节信息均适度增强的处理结果。究其原因,主要是因为经典的均衡化方法在增强过程中放大了图像原有的噪声,而所提方法则通过融合过程中的相关权重图在突显图像细节的同时很好地抑制了图像噪声。
综合分析,本文方法优于基于光学模型的去雾方法的原因在于,基于光学模型(主要是大气散射模型)的方法存在以下几个问题:1)建立在图像块处理的基础上,假定各个图像块内的大气光值恒定。当此假设不满足时,会造成最终去雾结果出现光晕伪影现象,如Tan方法、Tarel方法作为基于光学模型的去雾方法均存在此问题;2)当图像场景对象与大气光颜色相似时,将会导致暗原色原理失效,如He方法即在此种情况下无法获得理想的去雾效果;3)大气散射模型的前提是假设光线从场景点到接收点的传播过程中只发生单散射现象,所以对于发生多散射的雾天图像该物理模型将会失效。而所提方法则不考虑图像降质的物理成因,通过对图像各像素点亮度值的适当调节实现对图像的有效去雾。
该方法的具体步骤如下。1)初步优化。对原有雾图像分别进行白平衡处理和对比度变换,得到2幅初步优化处理图像。2)权重求取。分别求取2幅初步优化图像的雾气覆盖程度、显著度、曝光度权重,通过调节图像各像素点在以上3个方面的权重,改善图像雾气浓度、显著度、曝光度。其中雾气权重越小越好,但为图像远处场景对象保留一定程度的雾气将会使去雾结果看起来更为自然且有利于人眼对深度信息的感知。显著性权重图可加大原图中显著区域的权重,使这些区域在去雾结果中更为突显。利用曝光度权重图可使原图中欠曝光的区域的曝光度得到增强,使原图中曝光过度的区域曝光减弱。3)融合处理。将初步优化图像分别乘以雾气浓度、显著度及曝光度权重,对结果进行融合,以最大限度的提取各自计算结果中的有利信息,从而通过对多幅图像的互补信息的处理来获得更丰富的细节及更全面的信息,最后综合生成高质量的去雾图像。
3.2 定量评估
目前,国内外研究者在图像去雾算法方面开展了大量的研究工作,但对于去雾效果的客观评价则关注较少。在为数不多的去雾效果评价方法中,应用最广的是由法国学者 Hautiere 所提出的基于可见边的对比度增强评估方法[12]。但是该方法仅仅从图像对比度的角度来评估去雾效果,而未从人类视觉感知的角度考虑影响效果评价的其他因素。由于雾气浓度是去雾效果评价最为显著的特性,因此,我们利用He方法所提出的暗原色通道[10]结合前述雾气遮罩计算提出了一个雾气浓度衡量指标。此图像雾气浓度评价指标定义如下
其中,对于原有雾图像I及其去雾后的图像R,p为图像各像素点的坐标 p=(x,y),dc为采用 He方法计算得到的暗原色图像,v为采用本文雾气遮罩权重图计算方法所得到的均匀分布的雾气遮罩,H和D分别代表图像的高和宽。按照式(9)计算得到的每一像素点的暗原色图与雾气遮罩图乘积的数值累积和即可代表该场景的雾气浓度。图 14即为一个暗原色图像及雾气遮罩的求取结果示例。从图中可以看出,算法的复原效果越好,其所对应的去雾图像的暗原色图像 dc和雾气遮罩v的值与原有雾图像的dc、v值的差值越大。因此,评价指标值f越大,说明算法的去雾效果也越好。表1即为采用此评价指标对图8至图13的定量评估结果。从表1中可以看出,总体而言本文方法的f值统计结果最大,个别去雾结果与He方法的结果类似,说明所提方法具有相对较好的去雾效果。这一结论与图 8至图13的视觉效果是一致的,从而验证了所提评价指标的正确性。
此外,本文还采用上述提出的评价指标对 250张来自网络数据库以及Canon S80实际拍摄的不同场景、不同雾化程度的雾天测试样本进行了去雾效果评价测试。图 15即给出了对这 250幅图像的 f值统计结果。
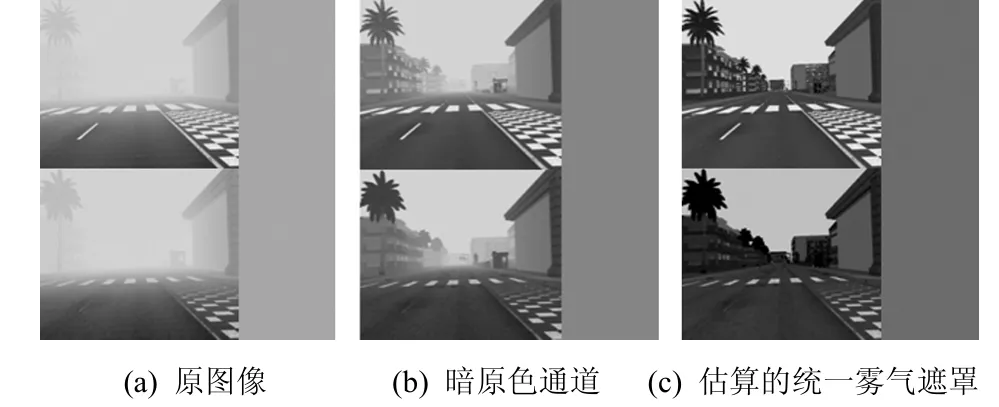
图14 不同雾气浓度下合成图像的暗原色通道及均匀分布的雾气遮罩
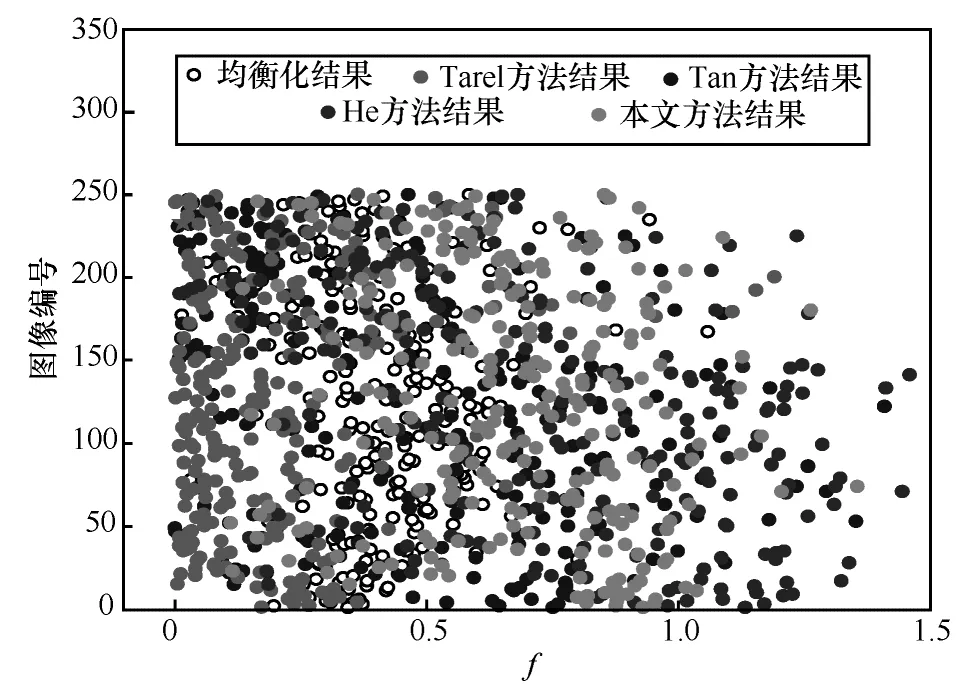
图15 对测试图像的指标统计结果
如图15所示,横轴表示评价指标值,纵轴为图像编号,从图中可以看出,本文方法与He方法的f值在各去雾算法中相对较大。由于f值越大对应的去雾效果越好,由此可以验证本文所提方法的有效性,这与表1的f值评估结果及人眼对这250幅测试图像的视觉感知结论是相符的。
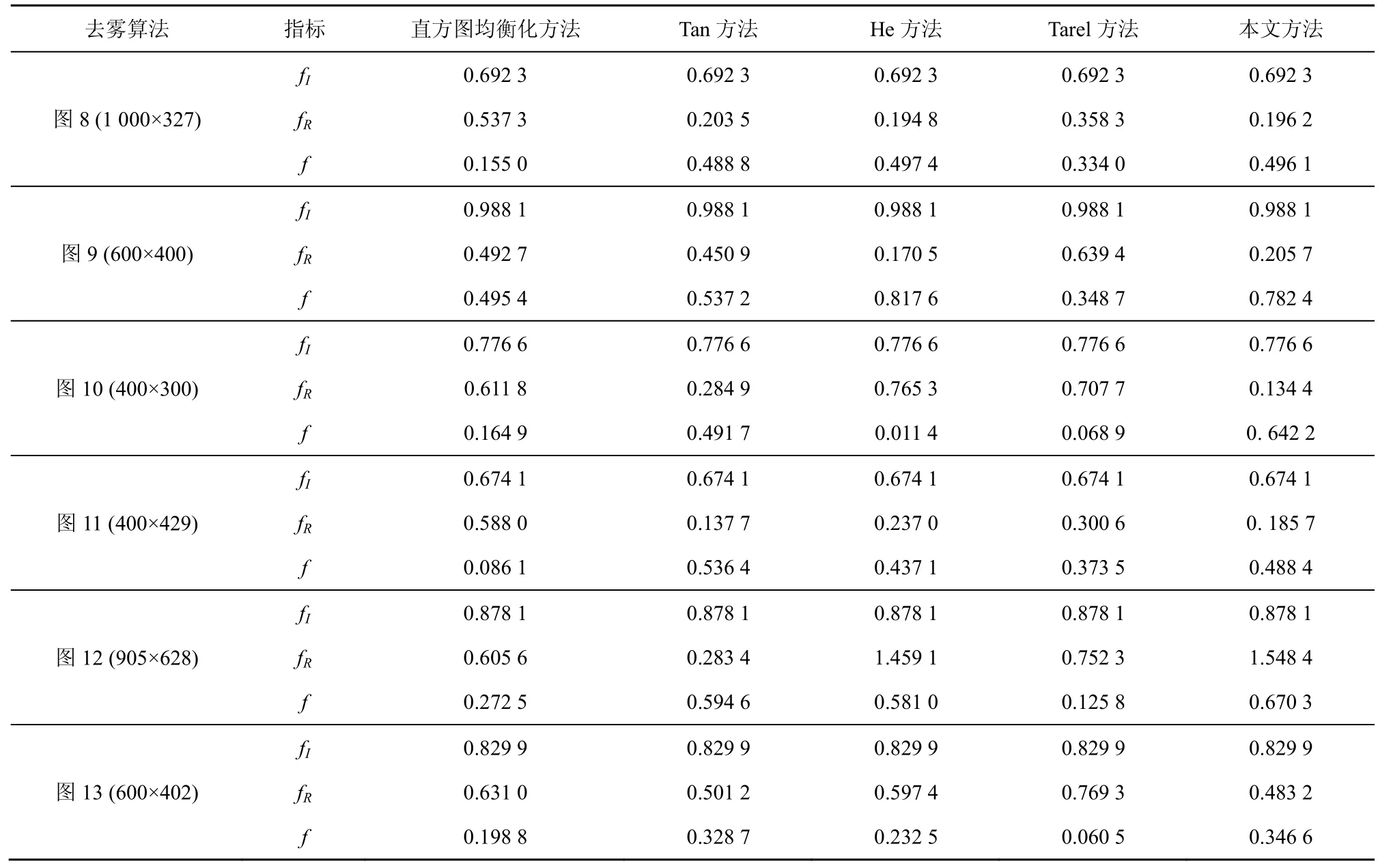
表1 采用基于雾气的评价指标对各去雾算法的统计结果
3.3 算法复杂度
对于一幅大小为sx×sy的图像,所提基于融合策略的去雾方法的算法复杂度为O(sxsy),即该算法的复杂度为输入图像总像素数目的一个线性函数。经典的均衡化方法的时间复杂度为O(L),其中L为输入图像的灰度级总数。Tan方法由于需要采用图切算法和置信度传播算法来优化所构建的基于马尔科夫模型框架的代价函数,因此该方法的复杂度要远远高于所提方法。He方法借助Alpha抠图技术实现对大气散射模型中传播图的精细化处理,但是该抠图过程所构建的拉普拉斯矩阵的规模较大。例如对于大小为sx×sy的图像,此拉普拉斯矩阵的大小为sxsy×sxsy,从而导致算法具有较高的时空复杂度。Tarel方法是基于光学模型的去雾算法中处理速度较快的算法之一,由文献[8]可知其算法复杂度为,其中sv为该算法所设置的滤波窗口大小。
此外,算法的运算时间也是衡量算法复杂度的一个重要指标。对于一幅大小为600×400的图像,均衡化方法的处理速度最快,只需0.05 s。Tarel方法次之,需要9 s。He方法和Tan方法所需处理时间相对较长,分别需要20 s和5~7 min。相比之下,本文方法具有相对较快的运算速度,处理同样大小的图像仅需2 s左右。图16即给出了上述5种去雾方法对于不同分辨率大小的图像的运算速度,其中所选取图像的大小分别为128×96,256×192,512×384和1024×768。
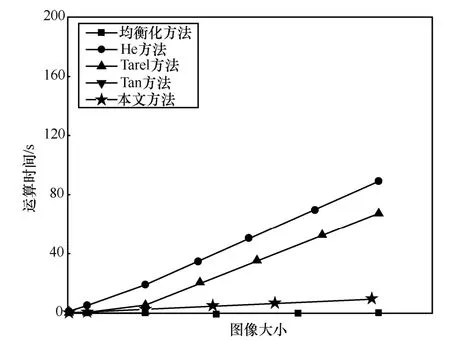
图16 各算法运算时间对比
4 结束语
图像去雾是计算机视觉领域的重要问题,本文提出了一种基于融合策略的算法以解决单幅图像的去雾问题。利用该融合策略,通过选取合适的输入图与权重图,可以达到有效去雾的目的。相比于已有基于光学模型的去雾算法,本文方法可以较好地处理暗原色原理失效的情况,且去雾结果不存在光晕伪影问题,同时运算速度相对较快。但本文的算法也存在不足,算法由于假定图像中存在天空区域而采用了白平衡处理,当这一假定条件不成立时,去雾结果在颜色上有可能会过于饱和。尽管如此,所提方法仍不失为解决单幅图像去雾问题的一种新的思路和处理途径。同时,相信本文所提出的解决去雾问题的融合思想将会有助于解决计算机视觉领域的其他问题。
[1]ZHANG J W,LI L,YANG G Q,et al. Local albedo-intensitive single image dehazing[J]. The Visual Computer,2010,26(6):1-8.
[2]SHWARTZ S,NAMER E,SCHECHNER Y. Blind haze separation[A].Proceedings of CVPR[C]. New York,United States,2006. 1984-1991.
[3]HU W,YUAN G D,DONG Z,et al. Improved single image dehazing using dark channel prior[J]. Journal of Computer Research and Development,2010,47(12): 2132-2140.
[4]SCHECHNER Y Y,NARASIMHAN S G,NAYAR S K. Instant dehazing of images using polarization[A]. Proceedings of CVPR[C].Los Alamitos,USA,2001. 1325-1332.
[5]FATTAL R. Single image dehazing[J]. ACM Transactions on Graphics,2008,27(3): 72-79.
[6]TAN R T. Visibility in bad weather from a single image[A]. Proceedings of CVPR[C]. Piscataway,USA,2008. 1-8.
[7]HE K M,SUN J,TANG X O. Single image haze removal using dark channel prior[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2011,33(12): 2341-2353.
[8]TAREL J P,HAUTIERE N. Fast visibility restoration from a single color or gray level image[A]. Proceedings of ICCV[C]. Kyoto,Japan,2009. 2201-2208.
[9]XU D B,XIAO C B. Color-preserving defog method for foggy or haze scenes[A]. Proceedings of VISAPP[C]. Lisboa,Portugal,2009. 69-73.
[10]ACHANTA R,HEMAMI S,ESTRADA F,et al. Frequency-tuned salient region detection[A]. Proceedings of CVPR[C]. Piscataway,USA ,2009. 1597-1604.
[11]BURT P,ADELSON T. The laplacian pyramid as a compact image code[J]. IEEE Transactions on Communication,1983,31(4):532-540.
[12]HAUTIERE N,TAREL J P,AUBERT D,et al. Blind contrast enhancement assessment by gradient ratioing at visible edges[J]. Image Analysis & Stereology Journal,2006,27(2): 87-95.
猜你喜欢
扬子江(2022年4期)2022-07-04 22:23:49
扬子江诗刊(2022年4期)2022-07-01 13:06:00
阅读(科学探秘)(2021年10期)2021-03-08 10:16:50
江南诗(2020年5期)2020-10-15 00:27:16
山花(2020年6期)2020-06-19 08:50:32
成都信息工程大学学报(2018年1期)2018-05-31 08:40:27
交通科学与工程(2015年1期)2015-12-23 11:08:15
摄影世界(2014年2期)2014-10-09 23:15:24
影像视觉(2013年8期)2013-04-29 19:05:14
大众摄影(2009年3期)2009-03-10 06:01:06