云重心方法在舰炮维修性评价中的应用
2014-10-25 05:54:30刘勇徐廷学孙臣良
哈尔滨工程大学学报 2014年9期
刘勇,徐廷学,孙臣良
(1.海军航空工程学院接改装训练大队,山东烟台264001;2.海军航空工程学院兵器科学与技术系,山东烟台264001)
舰炮是重要的舰载武器,为使其具有良好的维修性,需要进行维修性评价。目前多采用定量评分法,很强硬地让专家给出一个分值,忽略了维修性描述及评价的不确定性,易造成评价信息的丢失。在进行系统性能评价的过程中,不可避免地要考虑模糊性和随机性。二者联系紧密,难以分开[1-2]。与模糊综合评判法、集值统计法、层次分析法、主分量法等系统性能评价方法相比,云理论的优势是它在定性定量的转换过程中综合考虑了模糊性和随机性的关联性,使转换结果更加科学。云重心方法已广泛应用于各种复杂系统的综合评价。但是,已有的研究成果尚存在以下不足:1)当将定性评语转化为云模型时,基于3倍熵规则的熵参数的确定方法不够合理,且缺乏有效的确定超熵参数方法,使评价云发生器的设置不合理,影响到评价的准确性;2)利用归一化运算求解单个定量指标的云重心位置与理想云重心位置的离差存在偏差,且求解综合云重心偏离度的算法较为繁琐。针对这些问题,对云重心方法进行改进,并应用于舰炮维修性评价。
1 云理论概述
定义1 设U是一个用精确数值表示的定量论域,C是U上的定性概念,若定量值x∈U是C的一次随机实现,x对C的确定度μ(x)∈[0,1]是有稳定倾向的随机数 μ:U→[0,1]∀x∈Ux→μ(x)则 x在论域U上的分布称为云,每个x称为一个云滴[3]。
云用期望值Ex、熵En、超熵He3个数值来整体表征一个概念,把模糊性和随机性很好地融合到一起,为定性与定量的结合提供了数学依据。
定义2 设U是一个用精确数值表示的定量论域,C是U上的定性概念,若定量值x∈U是C的一次随机实现,x满足 x~N(Ex,En'2),其中 En'~N(En,He2),且x对 C的确定度满足 μ=exp[-(x-Ex)2/(2En'2)],则x在U上的分布称为正态云。
云模型中,定性概念与定量数据之间的相互转换是通过云发生器来完成的。其中正向正态云发生器根据云的数字特征 Ex、En和 He产生云滴drop(xi,μi),其具体算法见文献[4-5]。
2 评语的云模型表示
2.1 评语的云化过程
评语的云化是将各个评语用正态云的3个特性(E x,En,He)来表示,生成评价云。云模型和区间数之间有良好的映射关系,且云化的关键在于合理度量专家对该评语的定性认识。因此,应由各专家给出概念对应的区间数,然后对区间数进行集结[6],最后转换为云模型。
1)专家给出各个评语对应的区间数。设专家集为 E={Ei}(i=1,2,…,t),评语集为 S={sj}(j=1,2,…,m),专家 Ei在论域[0,1]上给出 sj的区间数记为 cij=[aij,bij],0≤aij<bij≤1,则专家群体的评判矩阵为 C=(cij)t×m。
2)将C=(cij)t×m按列进行集结并平均,获得云化区间数cj为

3)运用云模型与区间数的转换关系,将各云化区间数转化为云模型。评语集与云化区间数cj的对应关系为 sj~ cj=[aj-1,aj]。当 j=1,m 时,cj对应的定性评语用半云模型来描述;当j=2,3,…,m-1时,cj对应的定性评语用对称云模型来描述。
设一个对称云模型对应的区间数为[a,b],文献[7]采用指标近似法确定其特征参数如下:

2.2 2倍熵规则的提出及熵的改进模型
式(2)确定熵的方法显然是基于3En规则[1,8],即认为区间长度是熵的 6倍,区间[Ex-3En,Ex+3En]之外的云滴可以不考虑。因此,评价云发生器的各个云图不会有交叉。图1很好地证明了这一点,图中按照式(2)确定各云对象的期望与熵。

图1 区间长度为6倍熵时评价的云发生器Fig.1 Evaluation cloud generator with the interval length of 6 times of the entropy
既然云模型是表达定性概念的,那么每个云滴至少应对一个概念具有确定度,但从图1可看出,存在μ(x)≈0的点。对某个具体的云模型来说,根据3En规则,当x=Ex±3En时,就应该有μ(x)=0。
事实上,各云图之间在确定度较弱的区域呈现出交织状态。因为在连续的论域空间上,肯定存在这样一些云滴,它们对程度上相邻的2个概念M和N的确定度μM(x)与μN(x)差别很小甚至相同,因此很难清晰地分辨出云滴确定的是M还是N。这种交织体现出了概念在对程度表达上的模糊性与连续性。问题的关键是如何确定μM(x)≈μN(x)处的云滴x。为此,先对确定度的强弱进行划分。
定义3 对于描述定性概念M的云模型,若x∈[Ex-En,Ex+En],称x对定性概念M 有强确定度;若 x∈[Ex-En,Ex-2En)∪[Ex+En,Ex+2En),称x对定性概念M有中等确定度;若x∈[Ex-2En,Ex-3En)∪[Ex+2En,Ex+3En),称 x对定性概念M有弱确定度。
划分的依据是:在x=Ex±En处,μ(x)≈0.61;在x=Ex±2En处,μ(x)≈0.15;在 x=Ex±3En处,μ(x)≈0。
在 x∈[Ex-2En,Ex-3En)∪[Ex+2En,Ex+3En)上,μ(x)比较小,且 μ(x)在 x=Ex±2En 处取得最大值,因此,可以认为在x=Ex±2En处,云滴对相邻2个概念M与N的确定度都较小,且最难区分出云滴属于哪个概念的云对象。于是,把x=Ex±2En 2个相邻云模型的交织点,并让完整云对应的区间数的长度d=4En,即认为表达定性概念的云滴主要落在[Ex-2En,Ex+2En]内。这是本文提出的2倍熵(2En)规则。这样界定是合适的,因为位于区间[Ex-2En,Ex+2En]上的云滴对一个定性概念的贡献占总贡献的95.44%。
于是,当 j=2,3,…,m-1时,期望与熵的确定方法如下

c1对应的云模型为半降云,cm对应的云模型为半升云,期望与熵的确定方法为

式中:a0=0,am=1,半降云的期望值取0,半升云的期望值取1。只需要由式(4)确定的对称云模型的一半,即图像位于对称轴左边(cm对应的云模型)或右边(c1对应的云模型)的那部分。
2.3 基于差异度的超熵确定模型
所有云滴构成的随机变量X的分布被称为泛正态分布,超熵 He是 X偏离正态分布的度量[9]。文献[8,10]展示了超熵对云图的影响。文献[11]指出,当He<En/3时,云X的泛正态状态较为明显,当He>En/3时,云滴呈现为雾化状态,因此,将He=En/3称为云的雾化点。文献[6]认为:当He<En/3时,不确定度较小;当He>En/3时,不确定度较大。
文献[7]认为式(2)中的K值可根据评语的不确定性和随机性确定,但并未阐述具体的确定方法。文献[6]认为,专家对某一定性概念认知的不确定度是表达该定性概念的区间数长度d的增函数。该文献还指出:当d小于某一界限值dk时,可认为专家对定性概念认知的不确定度较小,He应小于En/3,此时取He=0.1En;当d>dk时,可认为专家对定性概念认知的不确定度较大,此时取He=0.3En;dk一般取论域[0,τ]的长度的1/10。
上述文献涉及的熵是由式(2)确定的,按照文献[11]的观点,当由式(3)确定 En时,取 He=0.2En为雾化点。
文献[6]确定超熵的方法存在的2点不足:1)区间数的长度大并不意味着专家对定性概念认知的不确定度也大,区间长度在论域上的划分是受评价惯例影响的。比如一般认为得分低于总分的60%为不及格,而不是50%。对于本文案例,当论域为[0,1]时,0.6左侧领域只能算是“差”,而不能算是“中”。这样带来的结果是,评语“劣”与“差”对应的区间数的总长度为0.6,而另外3个评语对应的区间数的长度之和为0.4。2)给出dk的取值时未考虑评语的数目。本文案例中评语个数为5,区间数的平均长度为0.2,且其区间数的长度均超过了论域长度的1/10,按照该文献的模型,He必然取值偏大。
审视将定性概念映射为区间数,再将区间数转换为云模型的过程,不难发现:对于云图中的某一个特定的x,μ(x)的离散程度很大程度上受专家对区间数划分意见的影响。因此,可认为专家对某一区间数的界定的差异越大,云的超熵越大。下面给出衡量专家给出的区间数与云化区间数之间的差异度η的模型。
定义4 对于第j个评语sj,设专家Ek(k=1,2,…,t)给出的区间数为,计算求得的云化区间数为 cj=[aj-1,aj],令 dj=aj-aj-1,则差异度 ηj的计算方法为

式中:j=1,2,…,m。
下面分2种情况进行讨论:
1)将双边约束的区间数(即 j=2,3,…,m-1)转化为对应的云模型时超熵的取值。当ηj≤0.15时,可认为各专家对区间数cj的界定的差异较小,云的泛正态化较为明显;只要ηj未达到ηu=0.2,就可以认为专家对区间数cj的界定的差异不算很大,云不应呈现出较明显的雾化状态。基于这样的考虑,建立超熵的计算模型如下:

式中:j=2,3,…,m-1。
2)将单边约束的区间数(j=1,m)转化为云模型时超熵的取值。对于半云模型,当ηj≤0.075时,可认为各专家对区间数cj界定的差异较小,云的泛正态化较为明显;只要ηj未达到ηu=0.1,就可以认为专家对区间数cj界定的差异不算很大,云应不应呈现出较明显的雾化状态。于是可建立超熵的计算模型为

式中:j=1,m。
建立的超熵计算模型具有以下性质:
1)He是η的增函数;
2)当 η=0 时,He=0.05En>0,仍能保证云的泛正态状态;
3)当η=ηu时,He接近但未达到0.2En,云不会呈现较明显的雾化状态。
3 评价意见的集结
3.1 单项指标值的云集结
通过各专家评判,各指标都将产生t个评价意见,其中有用数值表示的定量指标,也有用语言值来描述的定性指标。t个评价意见的集结值用一个云模型表示。设某个指标的t个评价意见的云对象的期望为(Ex1,Ex2,…,Ext)(定量指标的Exi为其第i个数值),该项指标集结值云模型的期望为Ex,则定量指标Ex集结方法为[12]

定性指标的Ex集结算法如下

3.2 综合云重心偏离度的计算
n个评价指标值可用n个云模型来表示,系统状态就可用1个n维综合云来表示。云重心偏离度θ用来衡量n维综合云重心与理想状态下n维综合云重心的差异。令T=(T1,T2,…,Tn)为综合评价云的云重心向量,L=(Ex1,Ex2,…,Exn)为云重心位置向量,H=(h1,h2,…,hn)为云重心高度向量,则[12-13]

式中:Ti=Exi×hi,(i=1,2,…,n)。文献[12]认为 H为各指标的权重向量,即 H=(ω1,ω2,…,ωn)。
文献[12-13]求综合云重心偏离度的方法如下:设在理想状态下,n维综合评价云重心位置向量为L0=(E,E,…,E),则在此状态下综合云的重心向量为对综合云重心向量进行归一化运算,得到向量TN=(,…,),计算方法为


把TN乘以权重值,然后再相加,有

下面指出这种算法的不足并进行改进。
首先,式(12)每一项都有ωi,把它约去,此式可简化为

其次,通过归一化运算求解单个定量指标的云重心位置与理想云重心位置的离差不合理,现举例说明。若一个定量指标的理想状态值为8,其各个状态值或专家提供的评价数值按式(8)集结后为12,则按式(14)计算的重心位置离差为0.5。如果采用本案例的五级评语,按照行业标准,12为“良”,但是,对于本文案例,当指标的重心位置偏离理想重心位置1为0.5时,意味着“差”。为此,将定量指标的集结值映射到定性评语对应的区间数中。
定义5 设 I1=[l1,u1]和 I2=[l2,u2]是定义在正实数域上的2个区间数,I1为对象GA的值域的一个子集,I2为对象GB的值域的一个子集,dI1=u1-l1>0为 l1到 u1的距离测度,dI2=u2-l2>0为 l2到u2的距离测度,定义I1到I2的一一映射为ξ:I1→I2,对应法则ξ表示等比转换,对任意的x∈I1,x'∈I2,x'为 x 的象,满足

不妨设一个定量指标Gr为成本型指标,即状态值越小越好。于是对于该指标的一个状态值fv,应存在 0<f1<f2<…<fm-1,使得能够界定定量评价标准并建立定量标准与定性评语的对应关系如下
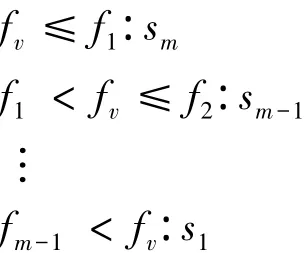
设该指标的各个值进行集结后的期望为Exag,该值对应的定性评语为sj,下面分3种情况进行讨论Exag转换为定性评语时的云重心位置。
1)当 j=2,3,…,m-1 时,sj对应的定量评价标准界定的区间为(fm-j,fm-j+1],由式(15),Exag经等比转换后在定性评语对应区间数中的位置为

2)当j=1时,设该指标的最大状态值为Vmax,由式(15),Exag经等比转换后的云重心位置为

3)当j=m时,定量评价标准界定的区间其实为[0,f1],于是由式(15),Exag经等比转换后的云重心位置为

照此方法,同样可建立Gr为效益型指标时的转换模型。这样,在求偏离度时,全部按定性指标处理,且可把式(13)进一步简化为

3.3 评价结果的确定
根据评语集、区间数与云模型之间的对应关系,在各个区间数上用相应的云模型表示出相应的评语,就构成了一个评价云发生器。
将求得的偏离度θ输入到定性评价云发生器中,通过激活的云对象来确定评价结论。偏离度θ的意义在于将多维云的云重心位置组成的云重心向量集结成一个点xa,且有xa=E-θ。给定阈值δ∈[0.1,0.2],考察各评语云对象的 μi(xa)(i=1,2,…,5)。设确定度最大的为maxμi(xa),与之相邻的云对象在xa处的确定度为μj(xa),那么:
1)当 maxμi(xa)-μj(xa)>δ时,第 i个评语值即可作为对舰炮维修性定性评价的结果输出;
2)当 maxμi(xa)-μj(xa)≤δ时,xa为评价结果的定量输出,而其定性表述可由专家另外给出。
4 案例分析
舰炮初样机试验阶段,管理部门邀请了10名专家,对其机械系统进行维修性评价。
4.1 将评语转化为云模型
规定评语集为
S={sj|j=1,2,…,5}={劣,差,中,良,优}
10名专家给出各评语对应的区间数之后,按式(1)计算出各评语对应的云化区间数,如表1所示。
进一步计算各云化区间数的长度,然后由式(5)计算专家意见与云化区间数的差异度为
η1=0.026 3,η2=0.101 0,η3=0.152 9,η4=0.128 9,η5=0.068 3.
再由式(3)、(4)、(6)、(7)计算各评语的云化模型参数,如表2所示。
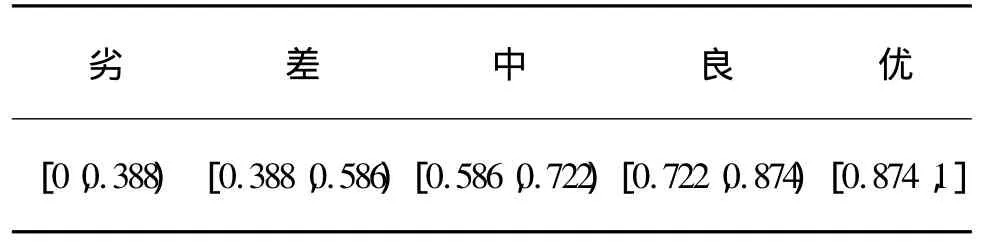
表1 各评语对应的区间数Table 1 Intervals of remark terms

表2 各评语对应的云模型参数Table 2 C loud model parameters of rem ark term s
4.2 计算综合云重心偏离度
维修性评价指标及权重如表3所示。G1为定量指标,其余指标为定性指标。

表3 评价指标及其权重Table 3 Evaluation indexes and their weights
检测诊断时间Rt与评价等级的对应关系如表4所示。

表4 诊断时间评价标准Table 4 Evaluation standard of diagnosis tim e
专家的评价意见如表5所示,其中故障诊断时间是由专家估计得到的。将表5中专家群体对单项指标的意见运用式(8)或式(9)进行云集结,期望值如表6所示。

表5 专家的评价意见Tab le 5 Expert evaluation views

表6 各指标综合云的期望Table 6 Expected value of index
将ExG1=13.9按式(16)进行等比转换,得到其云重心位置为ExG1'=0.725 8。然后利用式(19)计算评价结果的云重心偏离度θ=0.259 6。
4.3 确定评价结果
由表2中各评语对应的云模型参数构成的评价云发生器如图2所示。取δ=0.1,将θ的值输入到评价云发生器,xa将激活“良”和“中”2个云对象,对“良”的确定度约为0.33,对“中”的确定度约为0.05,由于0.33-0.05>δ,于是可判定该装备维修性水平为良。若按式(9)计算TN1=0.39,那么对指标G1的综合评价应为“中”,但按定量评分标准,对其评价属于“良”,这样就有了偏差。接下来再按式(10)计算偏离度 θ'=0.278 9,xb=0.721 1,也激活“良”与“中”2个云对象,且xb对“中”的确定度约为0.15,对“良”的确定度约为0.13,0.15-0.13<δ。于是判定该舰炮维修性水平介于中和良之间,倾向于中。云重心xa与xb如图3所示,y1指示的圆点表示xa对“中”的确定度,y2表示xb对“良”的确定度。由此可看出,以往的偏离度求解模型是存在明显的误差的。

图2 2倍熵规则下的定性评价云发生器Fig.2 Evaluation cloud generator with two-entropy rule
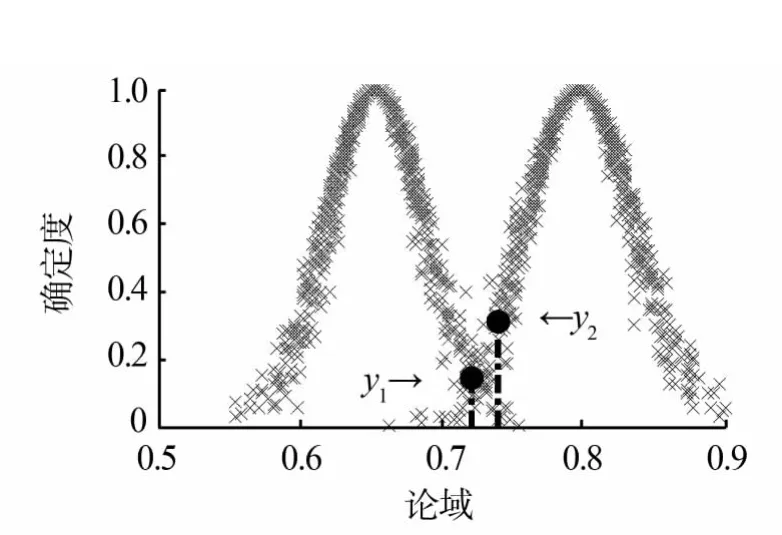
图3 评价结果Fig.3 Evaluation result
根据文献[6]的方法确定各评语云的超熵,则评价云发生器中各云模型的超熵均为其熵的0.3倍。它显然放大了专家对同一个问题认识的差异程度。在这样趋于雾化的发生器中进行评价时,难以直观判断出偏离度对所激活的云对象的确定度。
5 结束语
对云重心评价方法进行了改进,并应用于舰炮的维修性评价。在评价实例中,把根据改进模型与已有模型建立的评价云发生器进行对比,可看出根据改进模型设置云发生器的参数是合理的,而已有模型与云理论的基本原理不相符。通过将改进的综合云重心偏离度求解模型与原有模型的评价结果进行对比分析,可看出改进算法是简便且准确的,用于舰炮维修性评价是可行的。本文考虑的定量指标是成本型的,若是效益型指标,同样可建立等比转换关系,改进综合云重心偏离度的求解算法。
[1]GOU Jin.N-D normalmembership cloud model based on region partition[J].Journal of S of tware,2010,5(3):288-295.
[2]WANG Shouxin,ZHANG Li,MA Na,et al.An evaluation approach of subjective trust based on cloud model[J].Journal of S of tware Engineering& Applications,2008,1:44-52.
[3]TAO Limin,HUANG Decai,HONG Libin.Research on subjective srustmodel based on cloud model for open networks[J].Journal of Computational Information Systems,2011,7(13):4844-4854.
[4]FU Qian,CAIZhihua.Decision tree based on cloud model and its application in slope stability prediction [J].Journal of Information& Computational Science,2010,11(7):2240-2247.
[5]LIU Yuchao,MA Yutao,ZHANG Haisu,et al.A method for trust management in cloud computing:data coloring by cloud watermarking[J].International Journal of Automation and Computing,2011,8(3):280-285.
[6]岳勇,杨宏伟,白勇,等.一种基于云模型和惩罚函数的多属性评价方法[J].装甲兵工程学院学报,2012,26(1):92-97.YUE Yong,YANG Hongwei,BAIYong,et al.A method of multiple attributive evaluation based on cloud model and castigation function[J].Journal of Academy of Armored Force Engineering,2012,26(1):92-97.
[7]SHIYanbin,ZHANGAn,GAOXianjun,et al.Cloudmodel and its application in effectiveness evaluation[C]//The15th International Conference on Management Science&Engineering September.Long Beach,USA,2008:250-255.
[8]WANG Zhaohong.Application of cloud theory in association rules[J].I.J.Information Technology and Computer Science,2011(3):36-42.
[9]LIU Lizhen,WANG Wentao,ZHANG Maohong.The quality assessment of student learning based on cloudmodel[J].Journal of S of tware,2012,7(3):588-593.
[10]WANG Zhaohong.Cloud theory and fractal application in virtual plants[J].I.J.Intelligent Systems and Applications,2011(2):17-23.
[11]刘禹,李德毅,张光卫,等.云模型雾化特性及在进化算法中的应用[J].电子学报,2009,37(8):1651-1658.LIU Yu,LIDeyi,ZHANG Guangwei,et al.Atomized feature in cloud based evolutionary algorithm[J].ACTA Electronica Sinica,2009,37(8):1651-1658.
[12]廖良才,范林军,王鹏.一种基于云理论的组织绩效评估方法[J].系统工程,2010,28(1):99-104.LIAO Liangcai,FAN Linjun,WANG Peng.Method of evaluating organizational performance based on cloud theory[J].Systems Engineering,2010,28(1):99-104.
[13]张目,周宗放.改进的云重心评判法在高技术企业信用评价中的应用[J].数学的实践与认识,2010,40(19):37-43.ZHANG Mu,ZHOU Zongfang.An improved MCGC and its application in credit evaluation of high-tech enterprises[J].Mathematics in Practice and Theory,2010,40(19):37-43.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:34
海峡科学(2021年12期)2021-02-23 09:43:28
四川文学(2020年11期)2020-02-06 01:54:52
小天使·六年级语数英综合(2019年6期)2019-06-27 06:42:53
中成药(2018年12期)2018-12-29 12:25:44
地球环境学报(2016年1期)2016-03-06 11:55:09
地球环境学报(2015年2期)2015-02-28 14:02:54
中国检察官(2015年14期)2015-02-27 15:39:42
中国检察官(2015年12期)2015-02-27 15:39:37
散文百家(2014年11期)2014-08-21 07:16:36