广州地铁八号线车辆牵引系统的控制原理
2014-10-21 20:04朱健富
建筑工程技术与设计 2014年35期
笔者简介朱健富,男,2002年9月毕业于广州市机电中等专业学校机电专业,后陆续进修与从事工作相关专业知识的大专、本科课程,并取得相关毕业证书,现担任广州地铁运营事业总部运营三中心车辆维保三部生产技术室安全管理助理,曾担任检修二分部轮值工班长,在五年轮值工班长工作岗位上主要负责车辆牵引系统、列车控制、列车制动等检修及故障处理工作。广州地铁八号线运营列车为庞巴迪公司制造,但部分列车也在一号线混跑。广州地铁八号线列车已经运营将近十年的时间,车辆早已经正常投入使用了。本文旨在对广州地铁八号线庞巴迪造列车的电力牵引控制系统作一个简要介绍和分析,并提出一些个人的见解,与大家共勉。
【摘要】本文介绍了广州地铁八号线庞巴迪造车辆电传动控制系统的组成部件、基本原理
【关键词】刚性、逆变器、矢量控制、参考值、载荷
一.系统概况
广州地铁八号线车辆采用了与一号线车辆相同的编组方式,由一节拖车(A车带司机室)、两节动车(B、C车)组成一个单元车,再由两个单元车通过半自动车钩连接成一列完整的拥有6节车编组的列车。
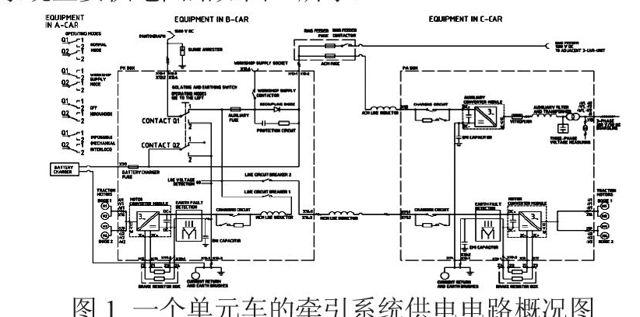
广州地铁八号线庞巴迪造车辆采用了国内首次使用的刚性接触网。一、二、八号线的供电方式都是采用“直—交—交”的方式,两者都是通过1500V直流供电,经VVVF逆变器转变成变频变压的三相交流电,供给三相鼠笼式异步电机进行牵引。庞巴迪造车辆的大部分牵引设备位于B车和C车,车下的VVVF逆变器主要分布在B车的PH箱和C车PA箱中。PH箱除了VVVF逆变器以外,还有高速断路器HSCB、接地保护开关、车间电源接触器等高压设备。而PA箱除了VVVF逆变器以外,还有辅助逆变器等辅助设备。牵引逆变器模块(MCM)都是通过安装再PH箱和PA箱中间部分的外部风扇进行冷却。另外,每个逆变器VVVF部分都装有一个改善内部气流,避免温度局部过高的内部小风扇。牵引系统主要供电回路如图1所示:
1、(Motor Converter Module)牵引电机逆变器模块MCM:每一节动车上都安装有一个MCM模块,四个牵引电机的三相变频变压电源。它是车辆牵引电力的核心部分,均安装在动车的PH箱和PA箱中。C车除了MCM模块外,还有一个ACM(Auxiliary Converter Module,辅助逆变器模块),也安装在PA箱内,用以向车辆提供空调、空气压缩机、PA/PH箱以及车厢设备柜的AC220V等系统所需的三相交流电。
1500V直流电经接地保护接触器、高速断路器、线路电感、充电电路、接地检测器到达MCM模块。每个MCM模块,由模块内部的牵引控制单元(DCU)对电流、温度、速度、指令等进行全面监控,通过门控单元(GDU)驱动三相逆变器中的IGBT模块,把1500V直流电转换成变频变压的三相交流电,从而驱动本节车的四台自通风4极3相制鼠笼式异步旋转电机。
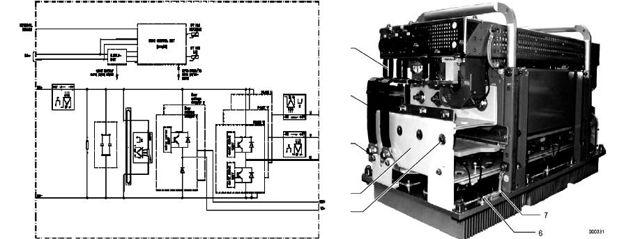
在电气上,MCM模块由三个主要的子系统组成,即三相逆变器、充电电容和过压斩波器。三个系统由MCM内部计算机监控。充电电容相当于一个能量缓冲装置,用于稳定直流输入电压,从而保证电机电流的调制。过压斩波器通过将能量消耗在MCM外部的过压保护电阻上来抑制瞬间过压,保护逆变器。图2是简化的MCM原理电路图。
在机械上,MCM模块包括:包含充电电容的充电单元,集成的门控单元(GDU)和包含IGBT模块的斩波相单元。集成化的电子箱安装在MCM模块的前部,包含有DCU(Drive Control Unit,牵引控制单元)板和单独供电单元。整个MCM的外观如图3所示。
1. 光缆输出到GDU(14x) 2. 螺丝刀导孔
3. 牵引控制计算机(DCU) 4. 电子箱盖的连接螺栓 (10x)
5. S2,跳线器,用于开闭蓄电池 6. X3,连接,用于安装软件
7. 连接螺栓,用于DCU (5x) 8. 蓄电池
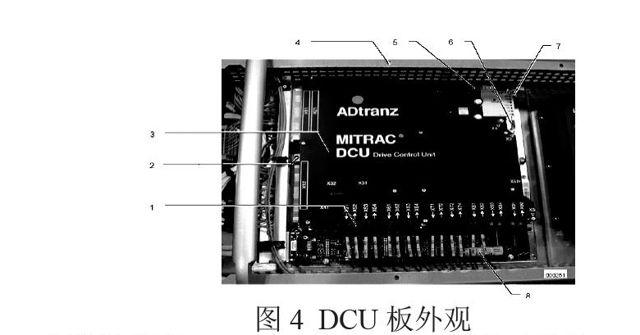
2、DCU在牵引逆变器MCM和辅助逆变器ACM中,各由一块本地计算机控制板来控制逆变器的工作,即为上述提到的DCU。在牵引逆变器MCM中称为DCU/M,在辅助逆变器ACM中称为DCU/A。它们拥有相同的硬件结构,只是采用的应用软件不同。逆变器控制板DCU/M控制动车的牵引供电,DCU/A则控制辅助交流供电。DCU板外观如图4所示。DCU/M、DCU/A和I/O单元通过MVB(多功能车辆总线)与VTCU(车辆&列车控制单元)进行通信。通过MVB,所有需要的信息在DCU和车辆控制系统的其他设备之间传输,包括了控制信号和状态、故障信息。但是在DCU之间没有直接的通讯,所有信息交换均通过VTCU在总线上完成,如图5所示:
MVB
圖5 一个单元车的DCU板与VTCU的接口原理图
3、供电模块在DCU/M板的旁边,还安装有一块单独的供电模块,用以给DCU/M板、门极控制单元(GDU)
和一些测量设备如温度传感器、速度传感器等进行供电。
一、 牵引系统功能和特性
1、 牵引方向选择
要求列车牵引的方向直接由VTCU来进行选择并给出,被定义为与每个独立的逆变器的安装相关。即如果逆变器的安装与牵引端方向一致,则此时逆变器的向前牵引方向与列车的向前牵引方向一致。
如果VTCU没有选择牵引方向,则牵引力矩参考值输出被设定为0,列车不会显示故障。运行过程中,当VTCU没有发出牵引/制动力请求或者列车速度很低(<7km/h)时,可以改变牵引方向。但在DCU中,牵引方向必须被设定好,当既没有向前又没有向后方向被设定时,逆变器会停止工作。若逆变器中同时设定了两个相反的方向,则也会停止工作并且列车显示屏将会显示“错误的牵引方向”的事件信息。
2、 牵引/制动力参考限制
牵引/制动力值由VTCU按比例给出和限制。其值为正表示牵引力,负值则表示制动力。其转矩控制原理如图7所示。
列车在牵引过程中,电流从高压直流回路经VVVF逆变器接到电动机上,在列车进行电制动过程中,电流方向则相反,牵引电机转变为发电机状态,将动能经VVVF逆变器返送到高压直流回路,当网压高于1800V时,牵引电机产生的电能被送到制动电阻消耗掉。使用IGBT(DCU/M)电机逆变器的控制来控制MCM,因此可以获得要求转矩,控制使切换频率得到最完善的使用,并且使MCM 产生的电流谐波最小,这样,在牵引电机中能量损失和转矩波动会达到最小。所有电机逆变器转矩参考都由VTCU计算,它也是列车速度、列车负载、反射率限制和需要的牵引力的一个功能。VTCU传来的转矩参考由每个DCU/M修改,并且根据DC链接电容器电压、牵引电机中和逆变器的温度、MCM输出电流、车轴过速和空转/滑动控制来调节。
3.充电和激活
每个电机逆变器使用一个高速断路器和一个充电电路来连接和断开逆变器的直流供电。充电电路由一个充电电阻、一个充电接触器和一个线路接触器组成。系统通过VCU发送到DCU/M的指令来激活直流充电。在当前没有故障并且牵引逆变器没有封锁时,逆变器可能出于以下几种状态之一:逆变器放电、逆变器充电或逆变器运行,具体所处的状态取决于VTCU发给DCU/M的“逆变器充电使能”和“逆变器启动使能”两个信号的值。当发生严重故障时,DCU内部的脱扣开关会分断,从而断开高速断路器及其后继电路与直流高压的连接。
转矩控制相关参数的得出:
·制动力参考值
制动模式下,制动力参考值的设定类同于牵引力参考值的设定,是与速度相关并根据实地试验得出的车辆特性数据来进行设定的。
·牵引力参考值
在牵引模式下,牵引力参考值与最大有效牵引力时的速度有关,0-100%的参考值与0-100%的有效牵引力一致,是列车速度的函数。这些参数都是根据实地试验得出的车辆特性数据来进行设定的。
·列车载荷校正
牵引/制动力参考值根据0-100%的载荷校正因子来划分,100%的校正因子对应于列车达到最大牵引/制动力时(根据相关标准称为AW2状态)的列车重量。
·牵引力/制动力极限
考虑到接触网功率限制、电机温度、逆变器温度、较大的轮径值差异、无效的轮径值、电机最大速度、冷却风扇的三相供电等因素,可以制定出牵引/制动力的极限值。另外,在制定制动力极限时,还考虑了制动电阻的温度及其冷却故障的影响。当VTCU检测不到冷却系统的有效供电时,牵引力极限被设定为最大50%,制动力极限为0%。电制动力最大有效值会反馈回VTCU,从而单独控制制动系统中气制动力的预调节。
·牵引/制动力实际值
牵引/制动力实际值是计算好的输出到电机控制的牵引/制动力值,其中包含了空转/滑行保护。牵引/制动力设定值是不包括空转/滑行极限保护的输出到电机控制的牵引/制动力值。当列车滑行时,将会在调节函数中使用设定值代替实际值,从而避免在列车已经滑行时在施加额外的气制动。
·牵引力/制动力变化率
为了牵引力/制动力的变化曲线平滑,并通过限制牵引/制动功率变化从而减少电磁干扰和对接触网的影响,对牵引力/制动力变化率进行了限制。力的参考值在增加和减少时采用了不同的极限限制,它们与由列车速度决定的力的最大有效值相一致。在需要快速地施加制动时,例如在自动驾驶模式或者紧急制动时(广州地铁二号线在紧急制动时电制动不参与),可以通过VTCU发出“快速增加制动能量”的命令来获得更快的降低速率。
广州地铁八号线庞巴迪造车辆的动车组是使用三相异步电动机矢量控制系统,将接触网上的1500V直流电,逆变为频率、电压都可调的三相交流电,平行地供给车辆上的四台三相异步电动机,实现列车的启动,运行和制动的全过程控制,是一种大功率,高电压的变频调速装置,列车运行平稳,升降速度迅速,且振动和冲击力小,系统性能稳定,图7是该系统中的转矩控制原理框图,它是由输入给定,脉冲发生,电机驱动,能量反馈,信号反馈,故障监测等各个环节组成,主要单元的作用和功能分述如后。
1、转矩磁通控制器:它接收给定信号,故障监控信号和逆度器输出反馈信号。反馈信号包括有三相电流、电压信号、电机转速信号以及通过磁场观测器所形成磁通大小和相位信号。转矩磁通控制器根据所有信号进行综合分析比较形成两路控制信号, 电压信号uj和uk,转矩控制器具有构筑数学模形的功能。
2、坐标变换:两路控制电压uj和uk经过坐标变换形成ua、ub、uc三相调制电压输出。
3、脈宽调制环节:三相调制电压ua、ub、uc和载波信号,磁通相位一起确定了六路触发脉冲送往隔离驱动器。
上述1、2、3环节的全过程都是在牵引控制器DCU中完成的,脉宽调制输出至隔离驱动器之间,采用光纤传送,既保证与主回路间很高的绝缘隔离,又有很好的防干扰性能。
4、隔离驱动器:除了输出六个桥臂开关信号外,还接受网压监测信号,逆变器输出的电压,电流反馈信号,每个IGBT器件的短路监测信号,并对这些反馈信号进行判断和快速反应,特别是IGBT的短路信号。
5、逆变器主回路为三相桥式电路,使用耐高压,大电流的IGBT器件,自身具有防反压和瞬时短路的保护功能。与GTO器件相比较,开关损耗大大降低。此外主回路还有风压监控,过热保护等功能。
6、标准信号转换模块可将电量和非电量(温度)转换成统一的电流信号提供给系统的各个控制器。
7、转子磁通观测器是一个组合型的磁通运算器,低速时利用定子电流和转子转速来观测转子磁通,在高速时利用定子电流和电压观测转子磁通。以提高精度,观测结果送往转矩磁通控制器。磁通观测信号是矢量控制系统的最主要的反馈信号,它的观测精度直接影响系统的控制精度。
为了保证逆变器输出电压波形的对称性,该系统采用了分段同步调制的方式。控制调制比fSW/fs的比值基本是3的倍数,这样能有效地减少谐波和脉动噪声。
三、广州地铁八号线庞巴迪造车辆列车牵引控制系统与一号线西门子列车相比,有以下几个优缺点:
· 采用了可控性能更好,工作更加稳定,功率更大的IGBT绝缘栅双极晶体管,一号线西门子列车则采用门极可关断开关 (GTO) ;
· 牵引控制单元(DCU)的集成化更高,将一号线西门子列车的DCU和UNAS融为一体,由原来的24块电子板,集成为由微机处理板(计算机板)、光纤接口板、扩展板三部分组成的一块DCU板,体积为原来的十分之一。
· VVVF逆变器的模块化设计,将DCU和VVVF逆变器都合成在一个模块上,体积仅为一号线西门子列车VVVF逆变器的四分之一。这样既节省原材料,降低成本,又减少故障的发生。一号线西门子列车的DCU和VVVF逆变器是分开安装,DCU在客室,VVVF逆变器在车底;由于列车运行过程中,DCU和VVVF逆变器之间是不断地进行信息的发送和反馈,线路过长,容易引起信号的出错和丢失,导致系统工作的不稳定,这也是一号线西门子列车DCU故障常有出现的一个原因。
· 在软件方面更为优越,使用更加方便。一个是在分析软件上,采用了EXCEL表格的形式,更为直观,容易被检修员工使用;同时,还可以进行现场的故障和信号的测试,对故障的判断和处理,带来极大的方便。
· 从维修角度来看,由于采用了模块化的设计,一旦出现逆变器模块当中的某些小问题,如温度传感器故障,就不能直接进行更换处理,需要将模块拆下后才能更换。笔者认为这些地方可采用其他方式,如将温度传感器采用嵌入的方式,安装到用手可直接拆装,同时不影响温度传感器的工作的地方,一旦出现温度传感器故障,就可轻松地将温度传感器更换掉,减少拆卸逆变器模块的工作量。
· 由于庞巴迪造车辆的VVVF逆变器是模块化设计,在故障的判断和处理上比一号线西门子列车的相对容易,但是这样的设计,使得各元器件相对集中,在散热上会带来一些问题,特别在大電流和常时间运营时,容易出现故障。就目前得散热情况来看,我认为是不能满足要求的,尽管目前的故障表现得并不频繁,但我还是建议在箱体多增加一个110V的内部风扇,以更好地改善VVVF逆变器的工作环境温度。
四、结束语
从整体来说,广州地铁八号线庞巴迪造车辆牵引控制系统技术是非常先进的,性能也很稳定。与一号线西门子同类车辆相比,具有更好的调速性能,硬件的集成化、模块化,软件功能更为强大和完善,更便于故障的判断和处理,这对提高列车的运输能力和节约成本上都具有重要的现实意义。
猜你喜欢
中国当代医药(2017年31期)2017-12-15
中国实用医药(2017年10期)2017-05-15
佛山陶瓷(2016年12期)2017-01-09
电子技术与软件工程(2016年22期)2016-12-26
现代商贸工业(2016年21期)2016-12-26
科技视界(2016年21期)2016-10-17
恋爱婚姻家庭·养生版(2013年2期)2013-05-14