基于北斗和GPS的双模田间作业机车定位系统
2014-10-16 08:54辛德奎黄操军甘龙辉
黑龙江八一农垦大学学报 2014年1期
辛德奎,黄操军,甘龙辉
(黑龙江八一农垦大学信息技术学院,大庆163319)
农业是人类生存和发展的基础,是国民经济的支柱产业[1]。精准农业和数字农业的应用可改变传统农业的粗放经营模式,可精细化的进行农田的生产作业,减少生产成本,保护生态环境,增加经济效益[2]。卫星定位系统是精准农业的关键技术,适用于精准农业技术措施实施的全过程,数据采集、农业技术措施的制定、实施等均与定位导航系统联系在一起[3]。田间作业机车的实时监控和信息管理是智能化农业机械装备变量作业的重要基础[4]。因此精准可靠地卫星定位系统是农业安全生产的必要保障。
北斗卫星导航系统是我国具有自主产权的卫星导航系统[5]。系统具有快速定位、简短通信和精密授时三大优势。使用该系统不需重建通信链路,不需租用卫星信道,不仅使用方便,而且可以取得非常明显的价格优势。目前,GPS产品在我国卫星导航终端市场占垄断地位,给国家安全和国民经济可持续发展带来巨大隐患[6]。所以设计开发一种基于北斗/GPS的双模田间作业机车定位系统对于农业安全生产有着重要意义。
1 系统介绍
1.1 系统总体方案设计
在田间机车定位系统中,由北斗/GPS双模接收机模块接收卫星信号。单片机和PC机通过串口获得北斗/GPS数据,对数据解析和处理后进行显示和存储。系统可设置机车作业的幅宽,进而计算机车的作业面积。PC机可通过串口调试软件获得未经过处理的北斗/GPS数据,也可以通过双模接收机数据观测软件MXT-View,观测系统信息和卫星信息。系统原理图如图1所示。

图1 系统原理图Fig.1 System theory figure
1.2 主要设备选型
根据上述系统需求,对系统中主要设备进行选型。选用STC公司生产的具有双串口的1T单片机STC12C5A60S2作为主控芯片。在系统中,主控模块既需要与北斗/GPS模块进行通信,又需要与上位机进行通信,因此选用带有双串口的控制芯片可以简化软件设计过程;选用北京时代民芯科技有限公司生产的MXTOS2-200北斗/GPS双模接收机模块接收卫星数据。该接收机模块定位的水平精度可达5m,高程精度可达10 m。
1.3 北斗/GPS双模接收机
MXTOS2-200模块是北京时代民芯科技有限公司开发的GPS、BD-2双模兼容接收机模块。能够提供高精度的载体三维位置、速度、时间信息以及原始观测数据等。
MXTOS2-200将射频前端、基带处理、定位软件高度集成,具有低功耗、小体积、高可靠、高性能等特点,可实现北斗/GPS单模、双模灵活定位模式。MXTOS2-200从天线输入到串行输出的整个信号处理链包含在一个单独的模块当中。封装形式使得射频输入直接在一个引脚上,可避免使用昂贵的射频电缆。贴片封装可软焊,节省空间同时提高可靠性。MXTOS2-200应用电路如图2所示。

图2 MXTOS2-200应用电路Fig.2 MXTOS2-200 application circuit
2 软件设计
2.1 通信协议
NMEA-0183是美国国家海洋电子协会(National Marine Electronics Association)为海用电子设备制定的标准格式。目前已成了GPS导航设备统一的RTCM(Radio Technical Commission for Maritime services)标准协议[7]。
BUPro是北京时代民芯科技有限公司基于用户至上的原则制定的专用双模协议,协议不仅包含类似于NMEA协议的普通协议,还有二进制协议RINEX2.10。用户可以根据自己的需求方便快捷地获取所需的各种信息,避免了用户为获得全部所需信息而不得不解析多个协议的烦恼。
2.2 协议解析
为获取机车的空间信息和运行信息,软件分别对SBDGGA、 SGPGGA、 SBDGMV、 SGPGMV四条语句进行解析。协议解析流程如图3所示。

图3 协议解析流程Fig.2 Protocol analysis process
SGPGMV和SBDGMV两条协议语句是BUPro专有的两条语句,接收机位置、速度、姿态等信息均包含在这两条语句当中。语句格式为:


在S GPGMV和SBDGMV两条语句中“,S”是语句的起始符“;S”后面的“GP”,“BD”分别表示GPS数据和北斗数据“;GMV”表示语句类型。不同的数据之间以逗号隔开。因此,当收到“S”后,通过判断“S ”后面的两个字符就可以知道该语句是GPS数据还是北斗数据。接下来判断后三个字符即可知道该语句的类型。最后通过判断逗号位置即可寻找到所需信息。
S GPGGA和SBDGGA两条协议语句含有卫星定位的主要数据[8]。是BUPro协议中最长,也是应用最广的一条语句。语句中不但含有接收机的空间信息,还包含卫星定位状态、定位精度以及可使用卫星数等信息。设计从这两条语句中获取接收机的高度、海拔、可使用卫星数和卫星定位状态信息。
3 系统测试
3.1 实物测试
由于系统需要显示的信息较多,液晶采用分屏显示方式。第一屏显示系统位置信息,第二屏显示系统状态信息。由图4可知系统经纬度、高度以及海拔信息,其中显示器最后一行末尾的06,表示当前可用卫星数是6颗。

图4 位置信息界面Fig.4 Location information interface
系统状态信息包括,车辆运动速度、航向、农机作业宽度和作业面积信息。其中农机作业宽度可以通过键盘进行设置,系统结合机车的作业宽度和机车的运动距离即可获得机车的作业面积。作业机车运行状态信息如图5所示。

图5 状态信息界面Fig.5 Status information interface
3.2 联机测试
采用MXT-view卫星观测软件对系统进行联机测试。MXT-view是北京时代民芯科技有限公司自主开发的导航数据观测软件,支持BUPro协议和部分NMEA-0183协议。观测软件可显示导航信息、卫星信息和可见卫星视图等信息。
系统导航信息如表1所示,其中HDOP表示卫星定位的垂直精度因子,VDOP为水平精度因子,PDOP为综合定位因子。

表1 导航信息Table1 Navigation information
卫星信息包括卫星的编号、高度角、方位角和载噪比等信息。表2中列出了当前可使用6颗卫星的信息。
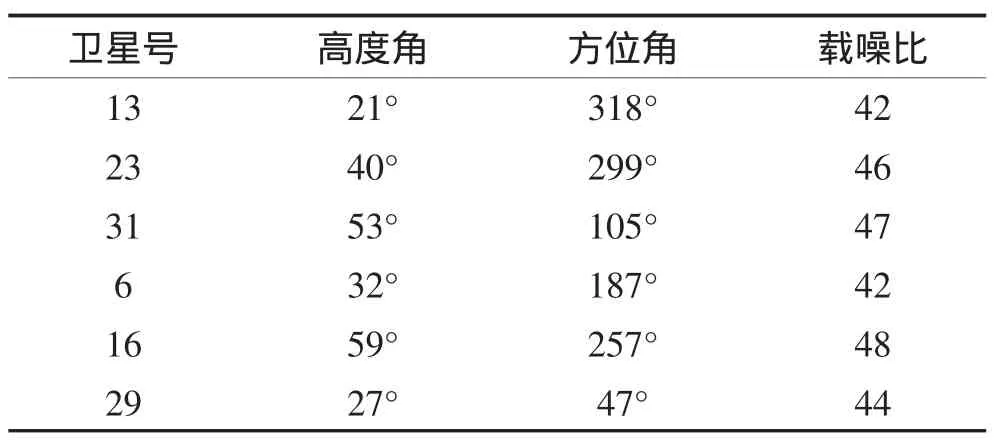
表2 卫星信息Table2 Satellite information
4 结论
基于北斗和GPS的田间作业机车定位系统,集田间作业机车定位、田间信息采集和信息传输与一体,将卫星定位和精准农业相结合,具有体积小,定位精度高,功耗低,工作稳定,通用性强,扩展方便等优点。通过对田间数据的定时检测和分析,以及对农业装备实时监控,将为智能化农业装备实现变量作业(如变量施药、施肥等)提供技术支持和研究平台。系统可同时接收GPS定位信息和北斗定位信息,二者相互补充,在没有GPS定位信息的情况下可以使用北斗卫星定位系统进行定位,有效的提高了系统的稳定性。
[1]陈树人,尹建军.GPS技术及其在农业工程中的应用[J].排灌机械,2003,21(5):40-41.
[2]庄卫东,汪春,王熙.基于GPS和GIS的农机田间作业回放研究[J].农业网络信息,2008(8):9-10.
[3]文泽.卫星技术在农业上的应用[J].山东农机化,1997,3(2):15-16.
[4]杨青,张征,庞树杰,等.一种基于GPS和GIS农业装备田间位置的监控系统[J].农业工程学报,2004,20(4):87.
[5]杨军,曹冲.我国北斗卫星导航系统应用需求及效益分析[J].武汉大学学报,2004,29(9):775-776.
[6]张荣群,张小栓.北斗导航系统在农业领域的应用展望[J].测绘通报,2012(增刊):685-686.
[7]钱德俊,张哲,胡晨.NMEA0183协议解析[J].电子器件,2007,30(2):668-669.
[8]于占宝,王熙,王鹏.基于嵌入式的农机GPS辅助导航系统串口通信的实现[J].黑龙江八一农垦大学学报,2011,23(6):20-22.
猜你喜欢
中国设备工程(2023年2期)2023-02-13
小哥白尼(神奇星球)(2022年3期)2022-06-06
新世纪智能(语文备考)(2020年4期)2020-07-25
当代陕西(2019年18期)2019-10-17
铁道通信信号(2019年2期)2019-03-26
中国铸造装备与技术(2017年3期)2017-06-21
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
中国火炬(2014年3期)2014-07-24
语文知识(2014年4期)2014-02-28