
自动空中加油杆LQR控制器设计
2014-09-26 03:48高久安贾秋玲
电子设计工程 2014年2期
高久安,贾秋玲
(西北工业大学 自动化学院,陕西 西安 710129)
空中加油技术在60年代得以大规模应用,其对提高空中力量的装备水平、决定战争的胜负有重要意义和关键作用。伸缩管加油装置是硬管式空中加油系统的核心部件,伸缩管控制系统必须保障加油过程的安全性、加油对接的可靠性及加油对接和加油过程伸缩管能稳定运动的性能[1]。Eunyoung Kim[2]等提出了一种受油机与加油机关联控制技术,该技术能够很好的解决加受油过程中的飞机运动控制问题,但仍然是针对飞机层面的控制设计,无法指导伸缩管控制系统设计。清华大学的胡亚峰[3]等对空中加油的递推模型与调度策略进行了研究,总结出了适用于空中加油调度模型解算的合理算法,上述研究工作属于空中加油空域管理的范畴,未涉及空中加油核心技术问题。中航第一飞机设计研究院的黑文静[4]等完成了对伸缩杆解耦控制的研究,首先建立加油杆的数学模型,结果表明伸缩杆是一个多输入多输出、耦合、非线性系统,当系统满足可解耦条件时,采用一种非线性反馈线性化的微分几何方法,输出与等效新输入之间呈现线性微分方程关系,选择合适的反馈形式可使伸缩杆的姿态控制解耦。然后在MATLAB中建立了伸缩杆及其解耦模型,并进行了仿真研究。结果表明该解耦方法很好地消除了系统间的耦合作用
本文通过对国内外关于硬式空中加油研究成果的总结,先建立了加油杆的数学模型,推算出其状态空间方程,然后进行硬式空中加油杆的控制方法研究。根据加油杆模型的结构特点,设计了线性二次型最优控制律。最后仿真结果表明,该控制律下的系统响应稳定,对于实际应用有一定的参考价值。
1 硬式空中加油杆动力学模型
1.1 加油杆纵向力矩分析
根据加油杆坐标系进行受力分析,纵向力矩分别有重力引起的Mp1,尾翼的两个舵面引起的Mp2,本身气动力引起的Mp3,姿态变化引起的附加力矩Mp4。下列各式中,G表示加油杆重力,φ,θ分别表示滚转角和俯仰角,|OG|表示杆重心到节点的距离,ρ表示大气密度,vx表示飞机飞行速度,S表示尾翼舵面面积,C1,C2,C3分别表示升力系数,阻力系数,加油杆本体阻力系数,ψ表示舵面同对称面的夹角,|OO1|表示舵面气动力焦点到节点的距离,δe1表示顺航向左边舵面的偏角,δe2表示顺航向右边舵面的偏角,S1表示加油杆本体底面面积,M表示总力矩,J表示加油杆的转动惯量。
由动力学方程可得:M=J·θ¨,取某一平衡状态(θ0,δe10,δe20,φ0,θ˙0)作为工作点,在该工作点小范围内,可将加油杆的运动近似为线性运动[5]可得:

(2)式中 Mp=Mp1+Mp2+Mp3+Mp4
作拉式变换并整理的:

1.2 加油杆横侧向力矩分析
横侧向力矩分别有重力引起的Mr1,尾翼的两个舵面引起的Mr2,加油杆本体所受气动力引起的Mr3。

同理,在工作点小范围内,可将加油杆的运动近似为线性运动,拉式变换整理得:
(5)式中 Mr=Mr1+Mr2+Mr3+Mr4
2 加油杆传递函数
参考前面的方程组并结合加油杆某工作点的状态和加油杆自身参数,该工作点处加油杆的状态如下:

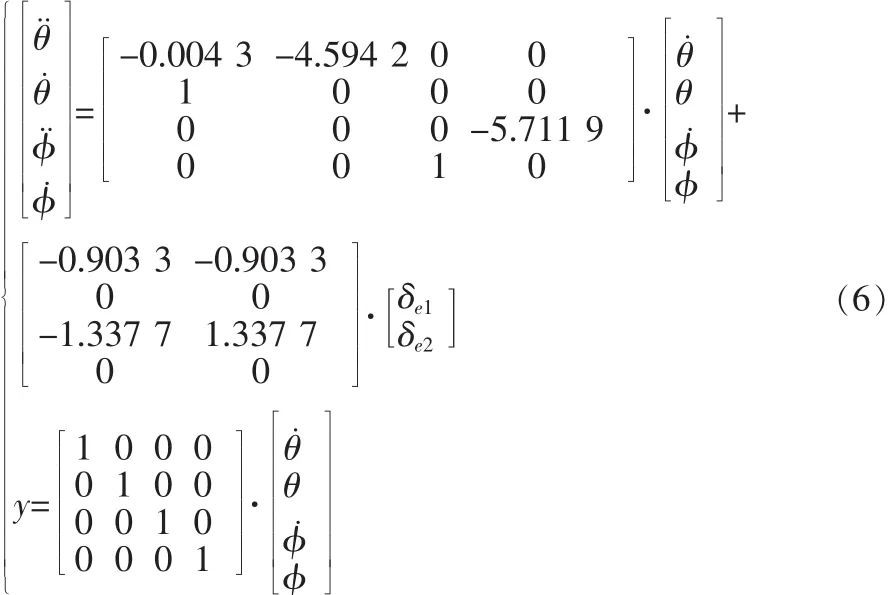
可计算得加油杆的状态方程如下:
俯仰角θ和滚转角φ对舵面的传递函数分别为:

分析其零极点特性可知对于俯仰角,极点非常接近虚轴,系统动态性能不好。对于滚转角,极点位于虚轴,系统也会处在振荡状态,系统响应曲线如图1。所以需要加入反馈,利用线性二次型最优控制来优化该模型的系统的阶跃响应。

图1 未加控制时系统的响应曲线Fig.1 System response curve without control
3 LQR控制器设计
最优控制实际上是指在某个性能指标下的最优控制,线性二次型最优控制就是被控对象为线性系统,性能指标是二次型泛函指标的最优控制问题[6-8]。
在前一节中介绍了硬式空中加油杆在θ=30°,φ=0°时的状态方程,根据实际工程需要,可设计无限长时间状态调节器。针对该系统的阵A和B阵,有:

易知系统可控,可以对系统设计无限长时间状态调节器。令加权矩阵:
由黎卡提代数方程:

加入反馈矩阵后,系统的响应曲线如图2,3所示,对比未加控制器之前的系统,加入了最优控制之后,系统变得稳定了。
由图2和3可知,加油杆舵面先后偏转一定角度,即在5秒和15秒的两次输入给入以后,俯仰角和滚转角会在2秒左右达到稳定,且超调也在很小的范围内,俯仰角速度和滚转角速度也比较小,线性二次型最优控制的控制效果较为理想。

图2 线性二次型最优控制输出响应曲线Fig.2 Output response curve under linear quadratic optimal control
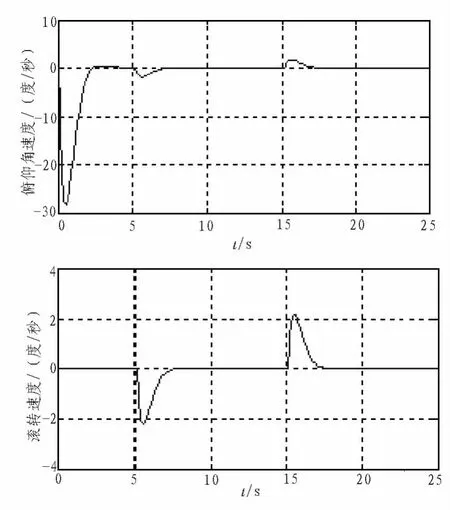
图3 线性二次型最优控制输出响应曲线Fig.3 Output response curve under linear quadratic optimal control
4 结 论
文中建立了加油杆的数学模型并推算了其状态空间方程,采用了线性二次最优控制器的设计,利用simulink搭建加油杆线性二次型最优控制仿真模块框架,且得到了较为理想的仿真结果,保证了系统良好的动态性能,从而实现了与受油机精确对接的目的,对于实际应用有一定的参考价值。
[1]王正林,王胜开,陈国顺.MATLAB/Simulink与控制系统仿真[M].北京:电子工业出版社,2005.
[2]Eunyoung Kim,Atilla Dogan,William Blake.Control of a Receiver Aircraft Relative to the Tanker in Racetrack Maneuver[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit 21-24 August 2006, Keystone,Colorado:AIAA 2006,6710-6730.
[3]胡亚峰,胡爱军,王煜航.空中加油问题的递推模型与调度策略[J].数学的实践与认识,2006,36(7):63-70.
HU Ya-feng,HU Ai-jun,WANG Yu-hang.The recursive model and scheduling strategy of aerial refueling problem[J].Mathematics in Practice and Theory,2006,36(7):63-70.
[4]黑文静,安刚,林浩,等.输入-输出非线性反馈线性化方法在硬式空中加油控制系统设计中的应用[J].航空学报,2008,29(3):651-656.
HEI Wen-jing,AN Gang,LIN Hao,et al.Input-output feedback non-linearization used in design of boom airrefueling control system[J].Acta Aeronauticaet Astronautica Sinica,2008,29(3):651-656.
[5]JIN Zhi-pu,Shima Tal,Schumacher Corey J.Scheduling and sequence reshuffle forautonomous aerialrefueling of multiple UAVs[C]//Proceedings of the American Control Conference, Minneapolis, MN, United states:Institute of Electrical and Electronics Engineers Inc,2006:2177-2182.
[6]Dogan Atilla,Sato Shinya,Blake William.Flight control and simulation for aerial refueling [C]//AIAA Guidance,Navigation, and Control Conference, San Francisco:American Institute of Aeronautics and Astronautics Inc,2005:4074-4088.
[7]刘凯.一级倒立摆系统设计与LQR最优控制仿真[J].工业仪表与自动化装置,2012(3):10-13.
LIU Kai.Single inverted pendulum system design and LQR optimal control simulation[J].Industrial Instrumentation&Automation,2012(3):10-13.
[8]朱红兰.一个超混沌系统的最优控制与同步[J].重庆师范大学学报:自然科学版,2013(3):65-68.
ZHU Hong-lan.Optimal control and synchronization of a hyperchaoticsystem[J].JournalofChongqing NormalUniversity:Natural Science,2013(3):65-68.
猜你喜欢
装备环境工程(2022年9期)2022-10-13
兵器装备工程学报(2021年12期)2022-01-11
医学食疗与健康(2021年27期)2021-05-13
北京航空航天大学学报(2020年10期)2020-11-14
武术研究(2020年2期)2020-04-21
临床医药文献杂志(电子版)(2020年31期)2020-03-01
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科学与财富(2018年1期)2018-03-03
航空世界(2014年7期)2014-09-24
