
一种新型四维加速度传感器研究*
2014-09-25 08:03吕华溢
传感器与微系统 2014年3期
李 敏, 刘 俊, 吕华溢, 秦 岚
(重庆大学 光电技术及系统教育部重点实验室,重庆 400030)
0 引 言
多维加速度传感技术是实现物体空间运动相对于参考惯性坐标系的加速度传感和测量的多维运动传感技术,在机器人控制系统、互动娱乐设备、军事和航天航空等领域中有着广泛的需求和应用。目前,对多维加速度传感器的研究主要集中在三维和六维领域,三维以上的商品化加速度传感器产品还处于探索研究阶段,尤其未检索到针对四维加速度传感器的研究报道。
现有多维加速度传感方案包括基于单一惯性质量块—弹簧—阻尼系统(简称I类传感方案)和基于多个单轴加速度传感器的集成系统((简称II类传感方案))两类[1],前者通过感知由弹簧和阻尼单元连接在壳体上的惯性质量块相对壳体的位移或弹簧的变形实现多维加速度的测量,后者通过解算按特定位置和姿态固定在刚体上的多个单轴加速度传感器的输出得到多维加速度。
I类传感方案的应用集中在一体化三维加速度传感器和基于微机械技术的三,六维加速度传感器方面的探索研究,包括弹性体应变型[2]、静电悬浮型[3]、超导悬浮型[4]、弹簧光电型[5]等形式。这些传感器具有结构紧凑、集成度高,但制作工艺复杂、成本高、适用范围窄、难以微型化等缺点;同时,因为方案与弹性体式六维力传感器的研究思路相似,故导致其在弹性体结构复杂程度与应变计布片及解耦、高刚度与高灵敏度之间[6]存在瓶颈矛盾难题。
II类传感方案的应用集中在三维和六维加速度传感器方面的研究,这种借助速度计组合拼装的多维加速传感的方案,在检测空间加速度中取得了一定效果,但拼装的结构存在稳定性差、体积大、结构复杂、装配困难、难以微小型化等缺点。
本文针对高档数控机床动态振动特性的健康监测需要,提出并研究了基于单惯性质量块的一体化四维空间加速传感器,建立了此四维加速度传感的结构模型和数值模型,借助有限元软件对其静态和动态主要性能进行了研究,得到了静态灵敏度、维间耦合和动态固有频率、维间耦合等特性,验证了本四维加速度传感器原理的正确性。
1 工作原理与数学模型
本四维加速度传感器选用石英作为转换元件,属分列式结构,主要由基座、石英晶组、惯性质量块、预紧螺栓、信号输出电极、基座组成。石英晶组夹装在惯性质量块和基座之间,且均匀分布在基座的石英晶组安装凸台上。图1为四维加速度传感器的结构示意图。

图1 四维加速度传感器结构示意图
1.1 工作原理
图2是本传感器内部石英晶组的布局图。设被测线加速度和角加速度分别为ax,ay,az,amz,石英晶组响应输出分别为AX,AY,AZ,AMZ。8组石英晶组均匀分布在同一圆周上,4组Y00切型石英晶组分布在X,Y轴与圆周的交点上,承担对ax,ay,amz3个参量的测量;4组X00切型石英晶组分布在其它4个位置,承担对参量az的测量;4组Y00切型石英晶组各自对应输出一路信号,4组X00切型石英晶组合成一路输出,对这5路信号进行预处理后得到4路信号,4路信号经过退耦矩阵运算后得到被测量。四维加速度测量原理的映射关系式为
(1)
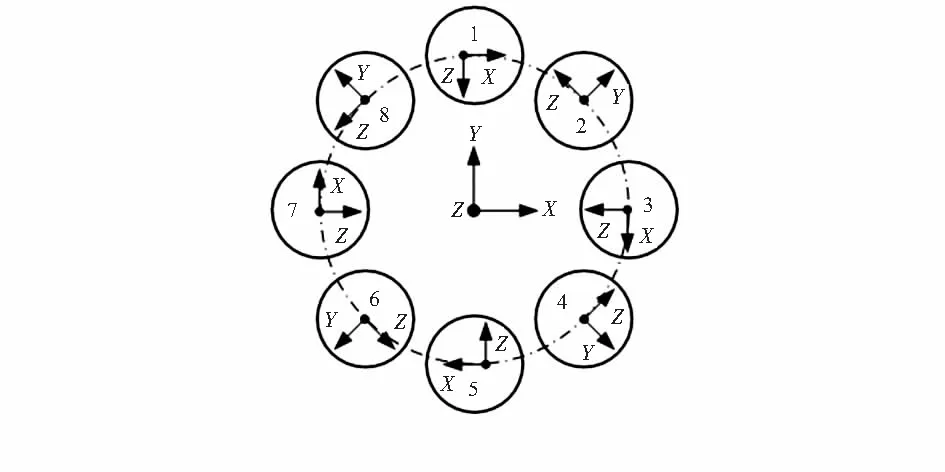
图2 石英晶组布局图
式中F为惯性力,字母下标表示惯性力方向,数字下标代表石英晶组编号。
1.2 数学模型
为简化分析,假设传感器中:石英晶组刚度相同、灵敏度相等,呈对称均布配置;惯性质量块为刚体,且各向刚度相同,灵敏度相等且均匀分布;az在石英晶组之间按杠杆原则分布;ax,ay和amz在石英晶组之间平均分配。

(2)

图3 传感器结构简图
根据式(1)和式(2)可进一步得到本传感器输入和输出的结构模型关系式(3)
(3)
可见本传感器在4个方向上均不存在静态线性维间耦合。
2 数值仿真实验
ANSYS软件具有强大的耦合场分析能力,是目前压电分析的首选软件,但其物理模型的建模功能较弱,不适合建立复杂的物理模型。表1是本四维加速度传感器模型的主要结构参数。
2.1 FEM建模
参数设置与网格划分:选用SOLID98耦合单元作为石英晶体的单元类型,输入石英晶体材料的压电系数、弹性系数和介电常数矩阵,按照图2中晶片组的布局要求建立局部坐标系,选用映射方式划分网格;其它的部件材料选用不锈钢,EX=2×1011Pa,μ=0.3,单元类型选用SOLID95,采用手动控制等分份数和自由网格划分相结合的方式划分网格,得到传感器结构的有限元模型。
载荷施加与特性研究:载荷施加主要包括约束和加速度载荷加载两部分,约束设置完全按照四维加速度传感器的安装状态进行相应设置,加速度载荷施加通过整体施加;静态性能研究通过观测石英晶片表面的电势差与输入加速度的关系的方法;动态性能研究借助谐响应仿真方法得到。

表1 传感器模型主要参数
2.2 静态特性仿真分析
图4是数值仿真得到的四维加速度传感器AX,AY,AZ向的输入/输出的线加速度—电势曲线和AMz向的输入/输出的角加速度—电势曲线,根据这些曲线可以得到式(4)所示的传感器的C矩阵
(4)
根据图4和式(4)可以得到表2所示的本四维加速度传感器的静态灵敏度特性和维间耦合结论,可见本四维加速度传感器各维的灵敏度分别为0.648 6,0.648 6,0.788 1 V/gn,0.003 01 V/(rad/s2),未发现有维间耦合,这与前述结构模型的研究结论一致。

图4 传感器输入/输出加速度—电势曲线
Fig 4 Input/output acceleration-potential curve of sensor
表2静态维间耦合结果
Tab2Resultofstaticdimensioncoupling

载荷维间耦合(%)AXAYAZAMZAX-0.1050.0080.014AY0.002--0.043-0.006AZ0.001-0.006--0.058AMZ0.002-0.004-0.145-
2.3 动态特性仿真分析
研究四维加速度传感器动态特性主要是研究其固有频率。研究固有频率可借助模态分析、谐响应分析等方法,图5给出了传感器1~6阶的固有振型模态,表3给出了传感器1~6阶振型特征。可见,模态分析可以研究传感器各阶模态的变形状态,由于传感器结构属于对称结构,X,Y向和Z向转动的固有频率一致,故这里也说明本四维加速度传感器的固有频率理论上最小可达到25 kHz,但无法直接得到各维在各频率点上的幅度—频率特性。

图5 传感器的固有振型模态
表3模态分析结果
Tab3Resultofmodalanalysis

阶次固有频率(Hz)振 型124332质量块沿Ⅰ,Ⅲ象限轴平分线作线性振动224348质量块沿Ⅱ,Ⅳ象限轴平分线作线性振动325314质量块沿Z轴作扭转振动439133质量块沿Ⅱ,Ⅳ象限轴平分线作折叠振动539305质量块沿Y轴作折叠振动641935质量块外沿沿Z轴作振动
为研究传感器各维在各频率点上的幅度—频率响应特性,本文采用谐响应分析的方法。图6是传感器在不同维度载荷激励条件下得到的传感器的幅度—频率响应曲线,可得到传感器X,Y,Z向线加速度和Z向角加速度分别为26.2,26.2,48.0,26.5 kHz。表4给出了取最低谐振频率向的0.707倍频率点各维的维间耦合特性,可见,本四维加速度传感器在动态测试中会有轻微的维间耦合,且随着选取频率点的降低维间耦合会有所下降。

图6 传感器幅度—频率响应曲线
表4动态维间耦合仿真结果
Tab4Simulationresultofdynamicdimensioncoupling

载荷向别维间耦合(%)AXAYAZAMZAX-0.1670.0182.889AY0.167-0.0014.246AZ0.1240.009-3.207AMZ0.0010.0020.000-
2.4 复合加载仿真分析
图7是四维加速度传感器在复合加载时传感器核心部件的应变云图,表5是复合加载后的输入输出结果和通过简单运算得到的各维输出解算结果。可见,本传感器虽然无静态维间耦合,但在传感器的AMZ向存在轻微的动态维间耦合,故在此方向存在相对较大的解算误差。

图7 传感器在复合加载时的应变云图
表5复合载荷加载结果分析
Tab5Loadingresultsanalysisofcombinedload
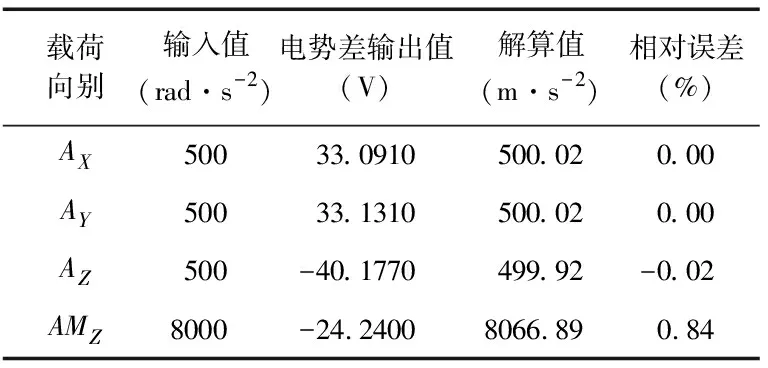
载荷向别输入值(rad·s-2)电势差输出值(V)解算值(m·s-2)相对误差(%)AX50033.0910500.020.00AY50033.1310500.02 0.00AZ500-40.1770499.92-0.02AMZ8000-24.24008066.890.84
3 结 论
1)本四维加速度传感原理和传感器结构能够有效实现对被测载体的四维加速度传感,且不存在静态维间耦合,在20 kHz频率点附近的动态维间耦合小于4.5 %。
2)依据文献[8]的单维微型化压电加速度传感器研究方案可知,本方案采用MEMS工艺可实现本类传感器的微、小型化。
3)虽然各维输出灵敏度略低于现有线加速度传感器或角加速度传感器,但固有频率有望在实际中提高2~5倍。
参考文献:
[1] Wang D H,Yuan G.A six-degree-of-freedom acceleration sensing method based on six coplanar single-axis accelerometers[J].IEEE Transactions on Instrumentation and Measurement,2011,60(4):1433-1442.
[2] Durand Didier.Six-axis accelerometer:EP1352251B1[P].2009—05—27.
[3] 唐富荣,薛大同.六轴加速度计的结构原理与阻尼振动设计[J].传感技术学报,2002(4):287-292.
[4] Canavan E R,Paik H J,Parke J W. A superconducting six-axis accelerometer[J].IEEE Transactions on Magnetics,1991,27(2):3253-3256.
[5] Chapsky Vladimir,Portman Vladimir T, Sandler Ben-Zion.Single-mass 6-DOF isotropic accelerometer with segmented PSD sensors[J].Sensors and Actuators A,2007,135: 558-569.
[6] 刘 俊,秦 岚,李 敏,等.平板式压电六维力/力矩传感器的研制[J].光学精密工程,2011,19 (7): 1569-1579.
[7] 丁明理,王 祁.无陀螺惯性测量组合研究现状概述[J] .中国惯性技术学报, 2005,13(4):83-88.
[8] Nemirovsky Y,Nemirovsky A,Muralt Z P,et al.Design of a novel thin film piezoelectric accelerometer [J].Sensors and Actuators A: Physical,1996,56:239-249.
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
科学导报(2020年50期)2020-09-09
电子制作(2018年23期)2018-12-26
电子制作(2018年14期)2018-08-21
中国继续医学教育(2015年1期)2016-01-06
铁道科学与工程学报(2015年5期)2015-12-24
现代机械(2015年1期)2015-01-15
中国神经再生研究(英文版)(2014年23期)2014-06-01
中国舰船研究(2014年6期)2014-05-14
