
硅微静电悬浮加速度计实验研究*
2014-09-25 08:03张汉蒸韩丰田孙搏谦马高印
传感器与微系统 2014年3期
张汉蒸, 韩丰田, 孙搏谦, 马高印
(1.清华大学 精密仪器系,北京 100084; 2.北京航天控制仪器研究所,北京 100039)
0 引 言
静电加速度计在空间微重力环境中可充分发挥其高分辨率、低量程的优势,可用于卫星非保守力和空间飞行器振动的测量,也可用于验证广义相对论的等效原理[1]。传统静电加速度计采用精密机械加工手段制造,工艺复杂,体积大,功耗高,造价昂贵,不适宜在微小型航天器上应用。与传统静电加速度计相比,硅微静电加速度计采用微机械加工工艺,具有体积小、重量轻、成本低、功耗低等优势,其工作原理是依靠可控的静电力将检测质量无接触地悬浮在电极腔内[2~5],通过降低加速度计的量程实现高分辨率,尤其适用于空间微弱加速度测量。
国内外已有多家单位开展了MEMS静电加速度计的研究,主要有美国球半导体公司[2]、日本东北大学[3]、英国南安普顿大学[4]、清华大学[5]以及上海交通大学[6]等。本文介绍了面向空间微重力环境应用的一种低量程硅微静电加速度计,分析了静电加速度计的力平衡回路,在大气环境下实验验证了硅微静电加速度计的主要性能。
1 敏感结构设计
硅微静电加速度计设计为玻璃—硅—玻璃键合的三层结构,电极板及检测质量的具体结构见图1,在上/下玻璃板上制备轴向电极和公共电极,在中间的硅层深刻蚀出检测质量和径向检测/加力电极。通过静电悬浮系统施加可控的静电力实现检测质量的六自由度稳定悬浮,不与周围电极产生任何机械接触。该结构的特点如下:1)检测质量为平行六面体结构,径向设计有梳齿;2)4组轴向电极采用检测和加力复用的方式,控制检测质量沿z轴的平动和绕x,y轴的转动;3)4组y轴电极检测并控制沿y轴的平动和绕z轴的转动,4组x轴电极控制沿x轴的平动;4)轴向电极板上的公共电极用于施加电容式位移检测所需的高频激励载波信号;5)通过变预载控制技术降低x轴、y轴的量程可以提高加速度计的分辨率,以实现微弱加速度信号的检测。

图1 微静电加速度计敏感结构
2 静电加速度计力平衡回路
2.1 工作原理
静电加速度计的工作原理如图2所示。当壳体有加速度输入时,检测质量会偏离腔体几何中心,采用7路电容式位移检测通道敏感检测质量运动产生的差动电容,7路位移检测信号经过第一次矩阵变换后得到检测质量六自由度运动的位移(x,y,z)和角位移信号(θ,φ,φ),位移检测信号经过六自由度悬浮控制器后产生六路控制电压,经过第二次矩阵变换并与预载电压叠加后输出14路反馈控制电压(V1,…,V14),经加力电路放大后,分别施加至轴向加力电极和径向加力电极,使检测质量稳定地悬浮在电极内腔的几何中心。这样,各个自由度的控制电压信号就反映了作用在检测质量上的加速度。设计时通过RC隔离网络分离高频的位移检测信号和低频加力信号,实现加力和检测电极复用。

图2 静电加速度计的原理框图
2.2 力平衡回路特性
静电加速度计依靠六自由度静电悬浮系统产生的静电力保证检测质量的稳定悬浮。以检验质量沿z轴平动回路为例分析。由于静电加速度计在大气环境下进行封装,因此,检测质量的运动受到空气阻力作用,故描述检测质量运动的动力学方程为
(1)
式中m为检测质量块的质量,z为检验质量沿电极坐标系z轴的位移,Kz,bz,Fz分别为力—位移系数、空气阻尼系数及静电控制力。
将式(1)进行拉式变换,得到以静电力为输入、检测质量位移为输出的传递函数
(2)
检测质量沿其它5个自由度运动的传递函数与式(2)类似。由式(2)可知,特征方程中包含一个正的特征根,系统是开环不稳定的,为了将检测质量稳定地悬浮在电极腔的几何中心,必须通过反馈和校正网络构成闭环的力平衡回路。
针对控制对象模型,构造以加速度为输入,控制电压为输出的力平衡回路,如图3所示。图3中,az为检测质量受到的沿z轴的加速度,位移检测环节的传递函数为Gs(s),加力放大电路环节的传递函数为Ga(s),静电悬浮系统控制器传递函数为Gc(s),反馈电压的出力系数为Kvz。

图3 z轴平衡回路框图
根据图3的力平衡回路,得到z轴静电加速度计的闭环传递函数为
(3)
在进行控制器设计时,在低带宽条件下可以把位移检测环节传递函数和加力电路放大环节传递函数分别简化为比例项系数Ks,Ka,这样闭环传递函数就简化为
(4)
3 实验研究
研制了一种硅微静电加速度计实验装置,包括封装后的静电加速度计芯片、位移检测电路及基于DSP的数字控制电路[7]。在大气环境下,检测质量运动时受到的空气阻尼影响显著,可为悬浮系统提供足够的气膜阻尼,六自由度控制器采用滞后校正就可以实现检测质量的稳定悬浮。
经过仿真和实验调校,最终选定的悬浮控制参数见表1。表1中x和y轴的部分控制参数不同的原因在于设计时x轴的加力电极与检测电极产生的静电力方向相反,而y轴加力与检测电极产生的静电力方向相同。

表1 悬浮回路参数
采用动态信号分析仪扫频测试了三轴平动回路的闭环频率特性,扫频结果见图4。结果表明:z轴闭环回路的带宽较低,为10.7 Hz;x轴闭环带宽为88.1 Hz;y轴闭环带宽为118.2 Hz。z轴和x轴、y轴闭环带宽相差较大的主要原因在于检验质量大气环境下的空气阻尼系数相差较大,z轴的空气阻尼系数较x轴和y轴高3个数量级。
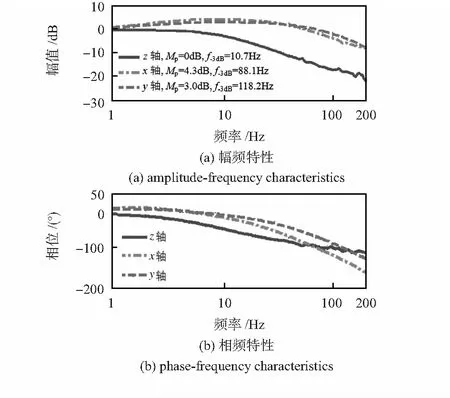
图4 闭环频率响应
在精密转台上,测试得到了静电加速度计的量程和分辨率。在预载电压为5 V条件下微静电加速度计x,y,z轴的量程分别为0.220,0.313,3.53gn。为了验证通过调整预载电压可以达到调节量程的目的,测试得到了预载电压1 V时x轴的量程为10.5 mgn,测试结果验证了变预载控制可以实现在线调节微静电加速度计量程的作用。
由于z轴的量程达到了3.53gn,进行z轴分辨率测试时,需要转动转台至较大角度,但是x轴和y轴的量程小于1gn,因此,会导致检测质量在x轴和y轴无法悬浮。故无法测试z轴的分辨率。实验测试了预载电压5 V时x轴和y轴的分辨率,达到4.85×10-5gn。
4 结 论
硅微静电加速度计采用电容检测和静电加力,特别适合MEMS器件结构和加工工艺,具有传统静电加速度计可实现高分辨率的潜力。本文介绍了一种低量程的MEMS静电加速度计及其初步测试结果,x轴和y轴加速度计的量程分别为0.220,0.313gn,分辨率为4.85×10-5gn。
参考文献:
[1] 李树德.空间静电加速度计研究之进展[J].大地测量与地球动力学,2005,25(2):88-93.
[2] Toda R,Takeda N,Murakoshi T,et al.Electrostatically levitated spherical 3-axis accelerometer[C]∥Proceedings of the IEEE Micro Electro Mechanical Systems(MEMS),2002:710-713.
[3] Nakamura S,Tochigi Y.MEMS inertial sensor toward higher accuracy & multi-axis sensing[C]∥The 4th IEEE Conf on sensors,Irvine,2005:939-942.
[4] Gindila M V,Kraft M.Electrostatic interface design for an electrically floating micro-disc[J].Journal of Micromechanical and Microengineering,2003,13:11-16.
[5] 王 嫘,韩丰田,董景新,等.三轴硅微静电加速度计的实验研究[J].中国惯性技术学报,2011,19(3):359-363.
[6] Cui F,Liu W,Chen W Y,et al.Design,fabrication and levitation experiments of a micromachined electrostatically suspended six-axis accelerometer[J].Sensors,2011,11:11234-11296.
[7] 马高印,严小军,韩丰田.硅微加速度计六自由度悬浮控制系统设计[J].导航与控制,2011,10(4):16-21.
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
军民两用技术与产品(2021年7期)2021-10-13
煤气与热力(2021年4期)2021-06-09
测控技术(2018年7期)2018-12-09
石油化工自动化(2018年5期)2018-11-14
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
通信电源技术(2016年1期)2016-04-16
探测与控制学报(2015年4期)2015-12-15
