
基于热释电传感器的时间差测距改进算法
2014-09-25 08:09:50刘前进
传感器与微系统 2014年5期
赵 迪, 杨 卫, 刘前进
(1.中北大学 电子测试技术国家重点实验室, 山西 太原030051; 2.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原 030051)
0 引 言
自然界中,任何温度大于绝对零度的物体时刻都在向周围空间进行红外辐射[1]。热释电红外探测器由于其成本低、功耗小、隐蔽性好,具有良好的环境适应性等优点而被广泛应用[2,3]。热释电红外传感器能够探测人体发出的微弱红外信号,在有效范围内实现对运动人体的检测。近年来,使用热释电传感器获得开关量信号的技术已日臻成熟,而利用热释电传感器进行人员的定位技术却是一个全新的领域,尤其在探测目标距离方面,显得少之又少。利用专门设计的装置把红外透镜与热释电红外传感器相结合,代替了传统使用的菲涅尔透镜,进一步提高了探测距离,克服了热释电红外线传感器探测距离近的缺点,为人体距离探测方面的研究提供了方便。
本文对文献[4]中未涉及到的问题进行了探讨,进一步丰富和完善了时间差测距方法[4],并对改进后的算法进行了实验验证,取得了很好的效果。
1 时间差法测距原理
热释电传感器探测单元都有一个探测视场角θ,由热释电传感器本身的视场角和所用光学镜片共同确定,当传感器和光学镜片选定后,该角度θ便被确定下来,为一个定值,即热释电传感器所探测的区域是有限的[5],如图1所示。
人员目标水平穿过探测视场时,会产生如图2所示的波形图[6]。其中,t1表示目标热电信号正半轴时间,t2表示目标热电信号负半轴时间,T表示目标信号出现的总时间,T=t1+t2。假定目标均是从图1中A点位置处出发,运动方向从左至右,目标(人体)运动速度保持在步速为1.1~1.5 m/s(成人正常步速),在图1所示的图形中,利用几何关系就可以测得目标与探测器之间的距离。

图1 PIR探测视场示意图

图2 目标通过传感器时信号波形图
2 运动方向对时间差法测距的影响分析
当人员目标匀速穿过热释电探测视场,运动方向与热释电传感器中轴线夹角不同时,产生的信号波形会发生很大的变化。图3表示人员目标以不同角度横向穿过传感器探测视场时所产生的波形。
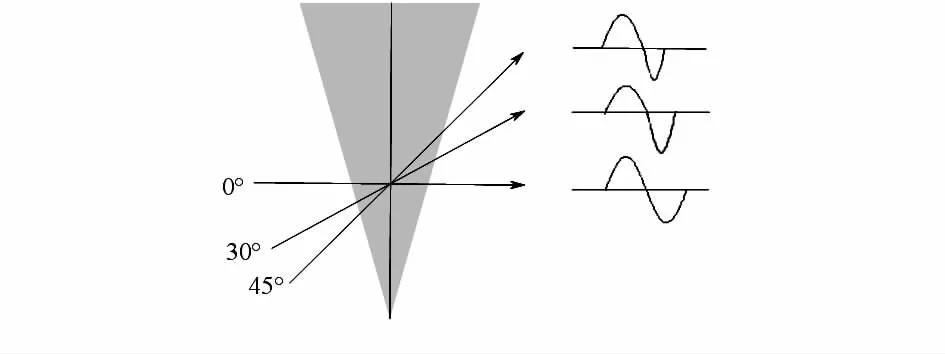
图3 不同角度穿过探测视场产生的波形
由图可以看出:人员入侵方向不一致时,所产生的波形发生很大的变化。当目标横向穿过探测视场时,热释电信号波形是正区负区对称的正弦信号;当目标斜切穿过探测视场时,波形改变较大,热释电信号正区负区不再对称。因为峰—峰时间差法测距是建立在信号波形正区负区对称的前提下,计算出信号的峰峰差值Δt。若信号波形正区负区不对称,测距结果就会产生较大的误差。
3 时间差测距改进算法
针对文献[4]中峰—峰时间差法测距未涉及人员斜切进入传感器探测视场的情况,先给出具体的算法流程。图4为目标斜切视场路径示意图,假设目标运动路径为AB段直线,其中,O点表示探测节点,d为目标距节点距离,点E为节点探测视场中轴线与0°方向直线(图中CD段直线)交点,目标斜切视场运动角度为θ,l1,l2分别为目标从A点到E点的距离和从E点到B点的距离,l为点C到点E的距离,角度γ为加了红外透镜后的传感器的1/2探测视场角,为已知量。设AB段总长度为l,由图可知,在直角△OCE中,有

图4 目标斜切视场路径示意图
l=d·tanγ,
(1)
(2)
在△ACE中,由正弦定理有
(3)
由以上三式得

(4)
在△EBD中,有
α2=π/2+γ,
(5)
(6)
结合式(5),式(6)有

(7)
(8)
又知AB=L
L=l1+l2,
(9)
(10)
对于一个确定目标的热释电信号来说,比例系数k与总时间T可通过信号处理中的统计学算法解算出来,从而由式(7)可以反推得到目标运动方向的角度θ,由式(10)可以反推得到运动目标距探测节点的距离d,从而便实现了目标距离的测量。
在目标距传感器距离d,目标行进速度v,1/2探测视场角γ已知的情况下,通过计算确定距离确定角度下的比例系数k和总时间T,计算结果如表1,表2所示,其中,表1中由近至远表示目标进入探测视场时靠近探测节点,目标出探测视场时较进入时而言远离探测节点。在图4中即是指目标从左侧运动至右侧过程中,目标从A点进从B点出;相反,由远至近表示目标从B点进A点出。当目标从右侧运动至左侧过程中分析情况类似。
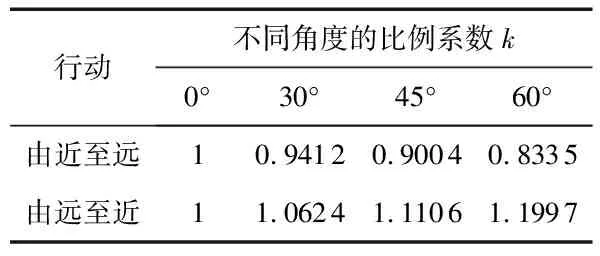
表1 确定角度下的比例系数k值计算结果
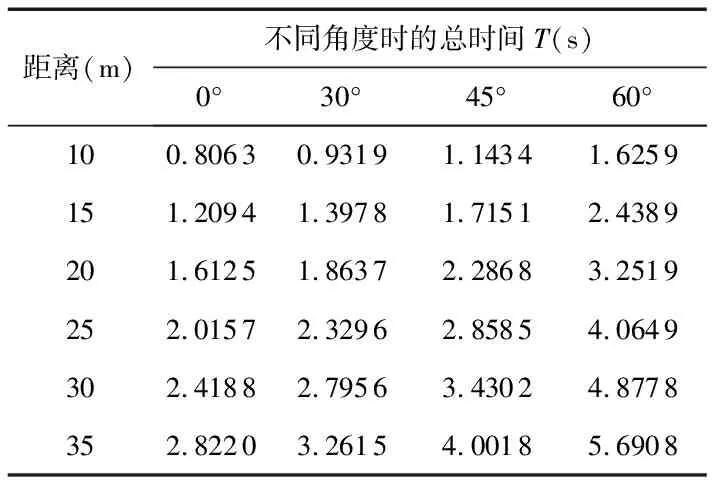
表2 确定距离和角度下的总时间T值计算结果
从实验结果可以看出:比例系数k、总时间T与目标运动角度θ呈现线性对应关系。只要找出目标热电信号中所蕴含的k与T值的信息,便能计算出目标沿不同角度方向穿过探测视场时相对探测节点的距离。
根据峰峰值时间差法测距原理,总时间T=2Δt,所以,求解总时间T的过程也就是求解峰峰值时间差Δt的过程,即可将对目标的测距转换为解算热释电信号中所蕴含的k与Δt值的信息。图5所示为斜切时间差法测距算法流程图。

图5 斜切时间差法测距算法流程图
根据斜切时间差法测距算法编写实验程序,进行算法验证实验,表3所示为多次实验数据的平均统计结果。
由表3所示实验数据的统计结果可以看出:改进后的时间差测距算法较之前的时间差测距算法,测距精度得到了很大的提高,说明斜切时间差法测距算法是正确可行的。
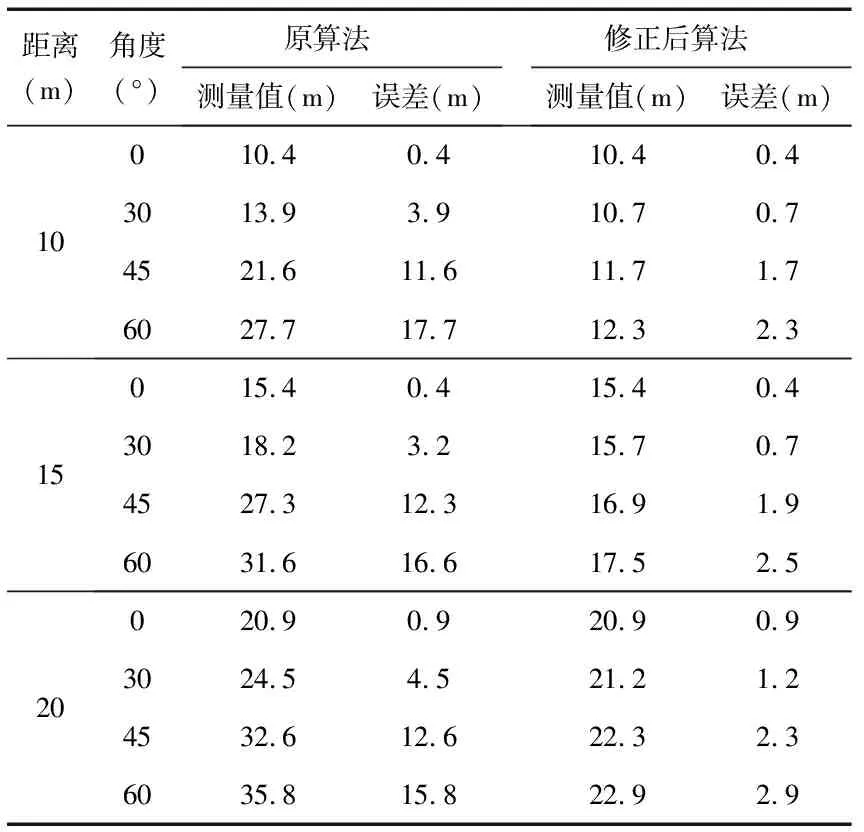
表3 目标斜切视场实测数据结果
4 结束语
峰—峰值时间差法测距是热释电传感器较为全新的应用领域。本文对人员目标斜切进入探测视场的情况进行了阐述与分析,并利用统计学方法,在大量实验的基础上,求得经验系数,通过对原来算法的改进和修正,计算出人员目标到传感器节点的距离。结果表明:30 m范围内该算法能够大大提高测距精度,使误差控制在可接受范围之内,具有重要的研究意义和很高的实用价值。
参考文献:
[1] 孙 乔,杨 卫,于海洋,等.动态下红外热释电传感器的目标定位方法[J].红外与激光工程,2012,41(9):2288-2292.
[2] 辜文杰,方 宏.基于热释电效应的红外人体检测[J].电子世界,2012(13):48-49.
[3] 万柏坤,冯 莉,明 东,等.基于热释电红外信息的人体运动特征提取与识别[J].纳米技术与精密工程,2012,10(3):249-256.
[4] 杨 卫,李波,孙 乔,等.基于热释电红外传感技术测距的时间差法研究[J].传感器与微系统,2013,32(4):37-40.
[5] Zappi P,Farella E,Benini L.Tracking motion direction and distance with pyroelectric IR sensors[J].IEEE Sensors Journal,2010,10(9):1486-1494.
[6] Fang J S,Hao Q,Brady D J,et al.Path-dependent human identification using a pyroelectric infrared sensor and Fresnel lens arrays[J].Optics Express,2006,14(2):609-624.
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
北京航空航天大学学报(2020年10期)2020-11-14 09:25:58
科学(2020年3期)2020-01-06 04:02:51
中国医疗设备(2019年1期)2019-01-15 12:10:54
山东工业技术(2017年23期)2017-11-28 09:15:38
演艺科技(2017年8期)2017-09-25 16:08:33
电子制作(2017年7期)2017-06-05 09:36:13
激光与红外(2015年10期)2015-03-23 06:07:18
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
