基于有限状态机的雷达状态模型建立
2014-09-25 10:19周莉娟刘心刚张志鹏
电子设计工程 2014年16期
周莉娟,刘心刚,张志鹏
(中航工业雷达与电子设备研究院,江苏 无锡 214000)
基于有限状态机的雷达状态模型建立
周莉娟,刘心刚,张志鹏
(中航工业雷达与电子设备研究院,江苏 无锡 214000)
现代雷达具有功能多特点。针对雷达系统控制,采用传统程序设计方法存在调试周期长,可移植性和可扩展性差的特点。本文采用有限状态机理论对雷达状态进行模型建立,根据状态机理论,通过仿真建立相应的状态切换模型,工程实践表明有限状态机能较好的进行雷达系统控制设计,系统可扩展性、可移植性较好。
雷达;系统;状态;有限状态机
随着新体制雷达和系统的研制,新理论和新技术的不断涌现,雷达技术进入了一个新的发展阶段。现代雷达具有状态多,功能全,系统结构分层多的特点。在雷达系统软件设计过程中,雷达状态的管理是十分重要的内容,它构建了雷达系统软件控制的主体框架。雷达主控部分主要功能是将来自飞控计算机的数据接收分解并转发给雷达相应分机进行控制,同时将各个分机状态信息接收并提取出有用数据传回主控软件。传统雷达主控系统管理主要采用流程图设计,调试过程繁琐,系统可扩展性较差,采用有限状态机可有效解决这一问题。目前,有限状态机在工作流定制,嵌入式TCP状态机,串口通信协议状态机等方面展开了运用[1-5],有限状态机还尚未应用在雷达系统软件控制中。本文将有限状态机首次应用到雷达系统软件控制中,建立雷达状态机模型,并运用到工程实际中,以实现雷达系统软件控制。
1 有限状态机理论
有限状态机(FSM,Finite State Machine)描述了有限个状态之间的转移和动作等行为的数学模型,由一组状态,一个初始状态,输入并根据输入及现有状态转换为下一个状态的转换函数,是不同状态在事件控制下的变迁过程。状态机具有四个要素:现态、条件(事件)、动作、次态。
定义:状态机 M=(Q,Σ,δ,q0,F)
其中,Q—状态的非空有穷集合。∀q∈Q,q称为M的一个状态。
Σ—输入字母表。
δ—状态转移函数,有时又叫做状态转换函数或者移动函数,δ:Q×Σ→Q,δ(q,a)=p。
q0—M的开始状态,也可叫做初始状态或启动状态。q0∈Q。
F—M的终止状态集合。F被Q包含。任给q∈F,q称为M的终止状态。
有限状态机分为两种模型,一种是摩尔型(Moore)状态机,一种是米勒型(Mealy)状态机。
1)Moore型状态机。其特点是输出与输入无关,输出只依赖于当前状态。该状态机的特点是输出在时钟跳变后的有限个门延迟后输出稳定值,输出在相当长时间内保持不变,优点是行为比较简单。
2)Mealy型状态机。其特点是输出在输入变化后发生变化,输出不仅依赖于状态而且依赖于输入,即当前状态与所有输入信号的函数。该状态机的特点是输出在输入变化后发生变化,输入变化可能出现在时钟周期内的任何时候,对输入的响应比Moore机对输入的响应早一个时钟周期,其优点是状态数目简单。
2 模型建立
2.1 雷达系统框图
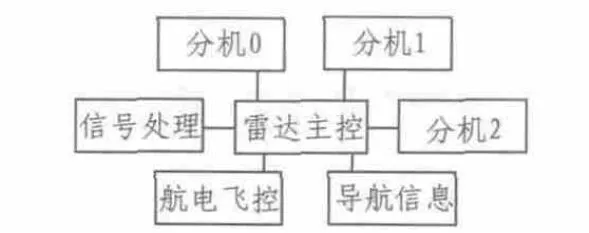
图1 雷达系统框图Fig.1 Radar system diagram
如图1所示,雷达[6]主控系统是连接雷达与其他模块的枢纽。雷达主控系统软件接收航电飞控和导航信息,发送给信号处理和其他各个分机,实现对其进行控制,同时接收各个分机的状态信息。雷达主控发送给各个分机的信息依据雷达当前状态打包,雷达状态构建了雷达主体框架,因此首先对雷达状态进行划分。
2.2 雷达状态划分
设计雷达状态机[7]的主状态为主状态0(启动状态)、主状态1、主状态2、主状态3、...主状态N(自检状态)。状态信息来源于上位机或者雷达系统内部划分。各个主状态下有相应的子状态。为规范雷达状态切换,约定:
1)子状态只能和相应主状态下子状态相互切换,或者返回相应主状态。
2)主状态只能进入该级下子状态或者在主状态间相互切换。
2.3 雷达状态机设计
首先设计状态机框架,状态机包含了三层结构,第一层是状态机,包括前一状态ID、当前状态ID、缺省操作,状态表(状态结构)。第二层是状态表,包括状态ID、状态名、进入操作、退出操作、缺省操作、状态事件表(状态事件结构)。第三层是状态事件结构,包括操作、事件、下一状态ID。下图所示为状态机组成框图。
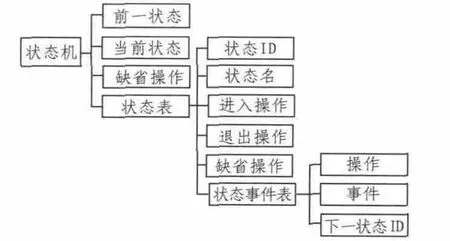
图2 状态机组成框图Fig.2 Finite state machine diagram
按照状态机组成框图,可将雷达状态机设计如下图所示。雷达状态机包括雷达控制事件ID、雷达当前ID、缺省操作(default function)、雷达状态表。其中雷达控制事件ID由航电系统分解得到,缺省操作为当前状态下雷达默认的状态处理,状态表设计了雷达状态切换的具体数据流的流向。
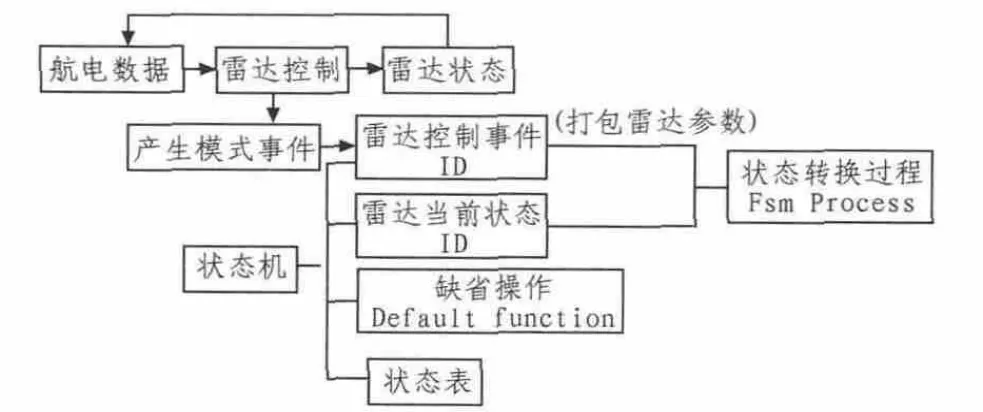
图3 雷达状态机框图Fig.3 Radar finite state machine schematic diagram
在雷达状态机设定过程中,首先给定雷达状态的初始状态,结合雷达状态跳转表,根据雷达状态划分,编写雷达状态表。缺省操作中制定了雷达当前状态和下一状态之间跳转的条件,在缺省操作中,打包雷达相应参数信息。该设计已运用到工程实际中,在大型多功能雷达中体现出了优越性。
3 状态机程序设计
3.1 软件流程图
根据雷达状态机框图,设计雷达软件流程图如下。
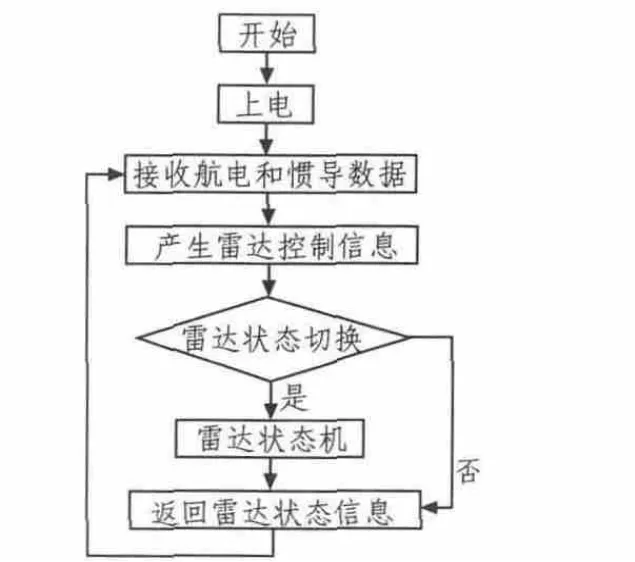
图4 软件流程图Fig.4 Software flow chart
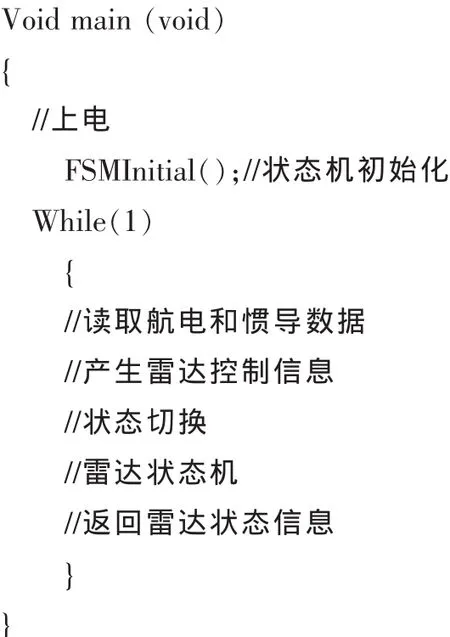
3.2 程序实现
程序设计软件框架如下:
3.3 上位机仿真界面
采用Matlab GUI对雷达状态机进行仿真,如图5所示。简化模型中雷达状态控制字为状态1,状态2,状态3,返回状态字为状态 1,状态 2,状态 3,且图中未显示状态下子状态,在仿真模型下,点击控制主状态控制字1,通过状态机运行,状态字1返回值有效。控制主状态控制字可进入该状态控制下的子状态控制字,同时可在多个主状态控制字之间切换。在实际控制模型中,控制和状态根据实际情况具有种类多的特点,同时根据功能需求需添加更多功能,采用状态机可实现控制和状态的良好控制。
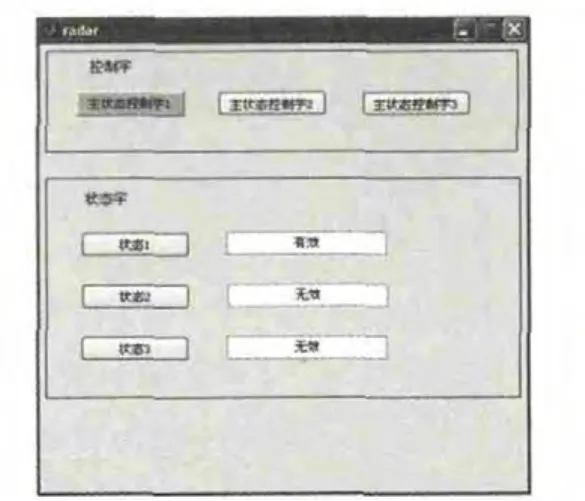
图5 软件流程图Fig.5 Software interface diagram
4 结 论
文中研究了基于有限状态机的雷达主控系统软件设计,并运用到工程实际,将复杂的状态变迁简单化,通过对整个状态机状态的合理设计,实现了系统的可靠、稳定运行。相比传统软件设计流程,有限状态机设计具有功能可扩展、层次结构分明的特点,降低了软件设计流程的复杂度,大大提高了软件重开发和维护效率。
[1]李莹,贾彬.一种基于状态机的串口通信协议的设计与实现[J].电子设计工程,2012,20(7):100-107.
LI Ying,JIA Bin.Design and implementation of serial port communication protocol based on state machine[J].Electronic Design Engineering,2012,20(7):100-107.
[2]王宗义,刘晖,李明宙.办公自动化系统中状态机工作流模型的设计和实现[J].广西科学院学报,2012,28(1):69-70.
WANG Zong-yi,LIU Hui,LI Ming-zhou.Design and implementation of state machine workflow model in office automation system[J].Journal of Guangxi Academy of Sciences,2012,28(1):69-70.
[3]冯翠丽,刘波涛.嵌入式TCP状态机的简化研究[J].西安邮电学院学报,2012,17(1):58-61.
FENG Cui-li,LIU Bo-tao.Embedded TCP state machines simplification research[J].Journal of xi an University of Posts and Telecommunications,2012,17(1):58-61.
[4]马建辉,王知学,李研强.基于有限状态机的车身防盗报警的实现[J].电子设计工程,2011,19(16):147-149.
MA Jian-hui,WANG Zhi-xue,LI Yan-qiang.Implementation of body anti-theft alarm based on finite state machine[J].Electronic Design Engineering,2011,19(16):147-149.
[5]包健,魏丽娜,赵建勇.基于有限状态机的电梯控制系统故障诊断方法[J].计算机应用,2012,32(6):1692-1695.
BAO Jian,WEI Li-Na,ZHAO Jian-Yong.Fault diagnostic method of elevator control system based on finite state machine[J].Journal of Computer Applications,2012,32(6):1692-1695.
[6]张明友,汪学刚.雷达系统[M].北京:电子工业出版社,2006.
[7]施先旺,刘婷婷,李国良.采用有限状态机实现控制指令的可靠检测[J].火箭推进,2011(5):63-68.
SHI Xian-wang,LIU Ting-ting,LI Guo-liang.Control instruction detection realized by finite state machine[J].Journal of Rocket Propulsion,2011(5):63-68.
Model design of radar state based on finite state machine
ZHOU Li-juan, LIU Xin-gang, ZHANG Zhi-peng
(AVIC Radar and Electronics Equipment Research Institute, Wuxi 214000, China)
Modern radar has characteristics of multiple functions.As traditional design methods was long-period debugging,as well as transferable and expansive unsatisfactorily.This paper establishes the radar state model based on finite state machine theory,simulation of state model is also established.Engineering application shows the radar system control design operates well and has preferable system expansibility and translatability.
radar; system; state; finite state machine
10.14022/j.cnki.dzsjgc.2014.16.011
TN701
A
1674-6236(2014)16-0035-03
2013-10-16 稿件编号:201310098
周莉娟(1985—),女,江苏无锡人,硕士,工程师。研究方向:雷达数据处理。
猜你喜欢
科学与信息化(2021年6期)2021-01-04
航天工业管理(2020年9期)2020-12-28
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2018年23期)2018-12-26
铁道通信信号(2018年9期)2018-11-10
电子制作(2017年16期)2018-01-30
外国语文(2015年4期)2015-11-14
广西科技大学学报(2015年4期)2015-02-27
中文信息学报(2014年6期)2014-02-28
空间控制技术与应用(2010年5期)2010-12-23