并联型有源电力滤波器内模PI控制
2014-09-22 09:12:56,,,,
电气传动 2014年2期
,,,,
(1.天津工业大学天津市电工电能新技术重点实验室,天津 300389;2.天津大学电气与自动化工程学院,天津 300072)
1 引言
随着电网中以电力电子装置为代表的非线性负载日益增多,由此导致的电网谐波污染日益严重、无功功率激增不容忽视。作为电网谐波抑制与无功补偿的重要方法之一,有源滤波技术得到了国内外学者的广泛关注。电力电子技术、半导体技术、计算机技术以及控制技术的飞速发展,使得有源滤波技术突破了结构、容量、调制算法、控制策略等方面的限制,在轧钢机、轨道牵引、电弧炉等典型场合得到了广泛应用。
有源电力滤波器从联接形式上可分为并联型、串联型、串-并联型以及混合型[1-4]。其中,并联型有源电力滤波器(SAPF)主要适用于谐波电流抑制与无功电流补偿,且具有拓扑结构相对简单、损耗较小等优点,因此应用较为广泛。
SAPF系统通常采用基于PI控制器的电压-电流双闭环控制策略,但常规的PI控制器设计与优化过程较为复杂,具有一定局限性,因此受到广泛关注[5-8]。本文针对此类系统,在传统双闭环控制策略的基础上,将内模控制的基本原理应用于系统电流内环与电压外环的PI控制器设计(内模PI控制),以简化参数整定过程,改善系统的动态及稳态性能。将内模PI控制策略应用于典型的SAPF系统,通过仿真分析以验证所提出方法的可行性与有效性。
2 SAPF工作原理及数学模型
2.1 SAPF工作原理
SAPF的功率电路拓扑结构多与常规的并网逆变器相同,通常就近并联于负载端,通过一定的电流检测方法,将负载所产生的谐波电流和无功电流分离出来作为参考电流,由SAPF生成,从而就近对谐波电流进行抑制、对无功电流进行补偿。
根据逆变器直流侧储能元件的种类,SAPF可分为电压源型(储能元件为电容)和电流源型(储能元件为电感)两种。电流源型SAPF,对功率器件开关频率有严格的限制,损耗较高,且不易于向多电平结构拓展,从而限制了其在大容量场合的应用,因此目前实际应用中多采用电压源型SAPF,如图1所示。
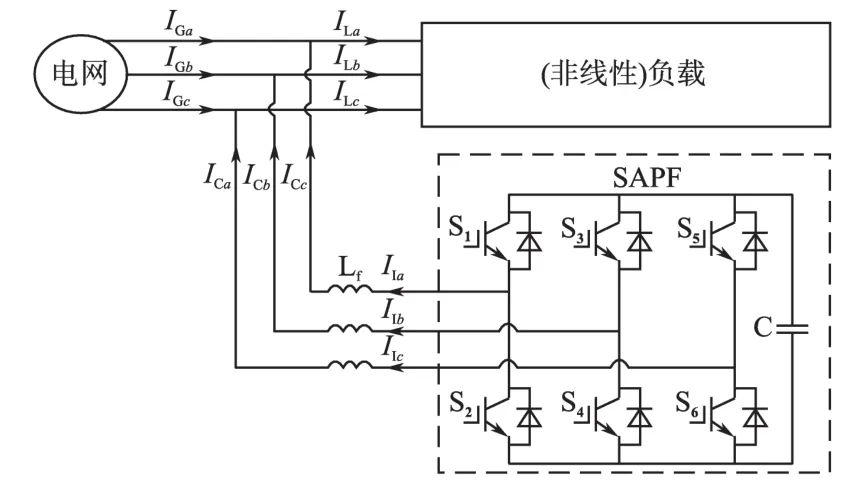
图1 电压源型SAPF工作原理示意图Fig.1 Functional diagram of voltage source SAPF
2.2 SAPF数学模型
2.2.1 SAPF交流侧电流关系
图1中某一相负载电流可表示为

式中:x=a,b或c;ILx,1p为x相负载基波有功电流;ILx,1q为x相负载基波无功电流;ILx,h为x相负载谐波电流。
以图1中所示的电流方向为正方向,根据SAPF的工作原理,并考虑到APF内部损耗所需的有功电流IAx,可得如下电流关系:

2.2.2 SAPF d-q轴数学模型
SAPF输出电压含有开关频率次谐波电压,进而产生相应频次的谐波电流,因此其输出端常通过图1所示的滤波器Lf与电网连接,以滤除该谐波电流。由此可得a-b-c三相静止坐标下SAPF的动态方程为
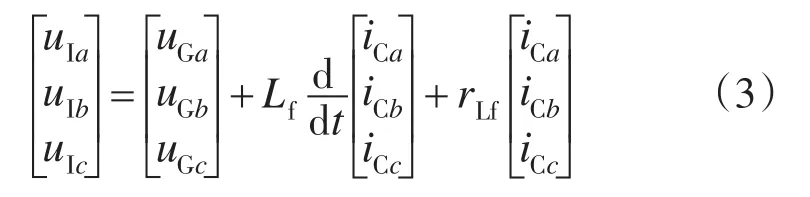
式中:uIa,uIb,uIc分别为SAPF输出端三相电压瞬时值;uGa,uGb,uGc分别为电网三相电压瞬时值;rLf为滤波电感内阻。
采用电网基波电压矢量定向,即以该矢量作为同步旋转坐标系中的d轴,则

式中:UG为电网相电压有效值。
由式(3)与式(4)可得SAPF d-q轴坐标系下的数学模型为
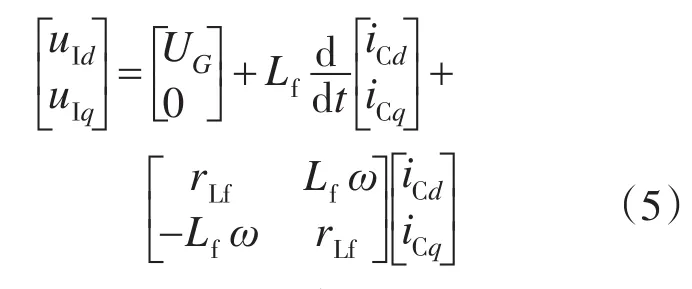
式中:ω为电网电压基波角频率。
2.2.3 直流侧电压与SAPF能量传递的关系
在理想情况下,如果补偿电流中只存在谐波和无功电流,则不影响直流侧电压恒定[9-11]。但由式(2)可知,SAPF内部存在损耗,如果不对该损耗进行补偿,则直流侧电压恒定难以维持,因此需要建立SAPF直流侧电压与该损耗能量间的关系,通过补偿实现SAPF直流侧恒压控制。
由能量守恒定律可知,

式中:IAd为IAxd轴分量;系数3/2是由于采用等幅值Park变换所产生的。
令Wdc=,则式(6)可以表示为

3 SAPF系统内模PI控制
根据数学模型可对SAPF系统实施基于PI控制器的双闭环解耦控制,如图2所示。由式(5)可知,在解耦过程中仍存在交叉耦合项,且d轴方程中还受电网电压影响,因此在控制系统中引入了解耦补偿项和前馈补偿项。
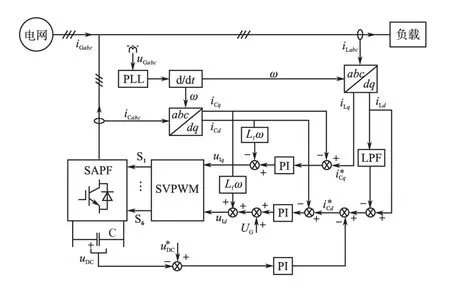
图2 SAPF系统控制原理图Fig.2 Control diagram of SAPF system
图2所示的双闭环控制结构中,PI控制器参数的合理性是影响系统稳定性和动态性能的关键因素。传统PI控制器设计方法较为复杂,而基于经验公式法的PI控制器设计方法有时难以满足系统对控制性能的要求。为简化PI控制器设计过程,并获得较为精确的PI参数,本文基于内模控制原理[12-13],对SAPF控制系统电流内环与直流侧电压外环PI控制器设计方法进行改进。
内模控制的结构框图如图3所示,c(s)为控制器传递函数,g(s)为受控对象真实的传递函数,gm(s)为受控对象模型的传递函数,v(t)为受控对象的输入,y(t)为受控对象的输出,y*(t)为受控对象的参考输出,ym(t)为受控对象模型的输出,e(t)为受控对象实际输出与参考输出间的误差,Δ(t)为扰动,Rd是为提高系统的抗扰能力引入的有源阻尼。
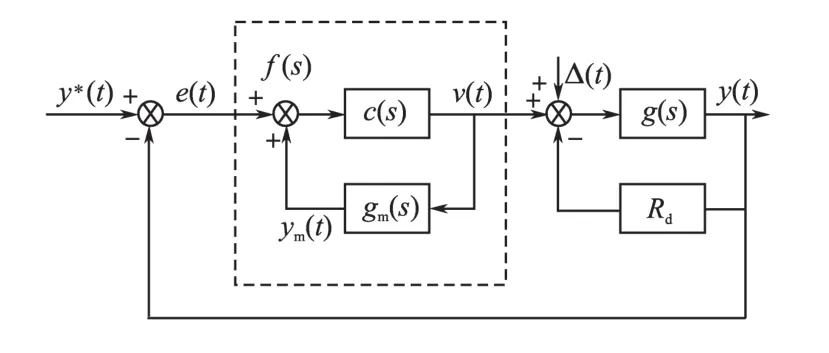
图3 内模控制结构框图Fig.3 The principle diagram of internal model control
控制传递函数通常表示为

其中,α表示带宽,可由下式确定

式中:tr为系统在单位阶跃输入下的上升时间。
根据式(8)可得由e(t)至u(t)的传递函数为

若受控对象为一阶系统,即
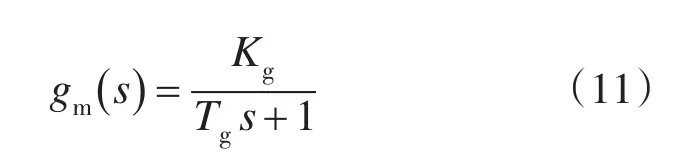
式中:Kg,Tg分别为受控对象传递函数的增益和时间常数。
令n=1时,式(10)可简化为

根据图3所示的控制结构,将式(5)变换至频域下,可得电流环传递函数gc(s)为

式中:Rd,c为电流环有源阻尼反馈增益。
由式(14)可知,gc()s为一阶系统,根据式(13)可得电流环PI控制器比例和积分增益为
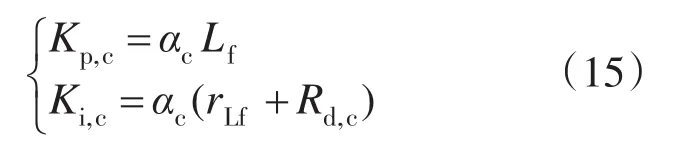
式中:αc为电流环带宽。
同理可得直流侧电压环控制结构框图,如图4所示。
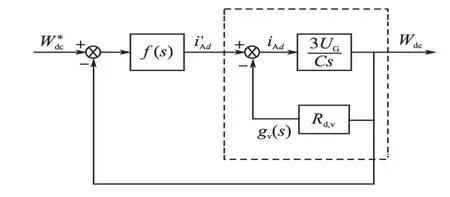
图4 电压环控制结构框图Fig.4 The principle diagram of voltage loop control
由图4知,i′Ad至Wdc的传递函数gv()s为

式中:Rd,v为电压环有源阻尼反馈增益。
由式(13)和式(16)可得电压环PI控制器比例和积分增益为

式中:αv为电压环带宽。
4 仿真分析
为验证SAPF内模PI控制策略的可行性与有效性,对补偿典型非线性负载场合进行仿真分析。SAPF系统主要仿真参数为:电网线电压380 V;滤波电感5 mH;直流侧电压800 V;直流侧电容1×105μF;电流环PI参数Kp,c=100,Ki,c=10;电压环PI参数Kp,v=0.003 3,Ki,v=0.22。
SAPF系统仿真条件为:直流侧电容电压自0.5 s开始稳定于800 V;初始负载为感性无功负载,有功功率为10 kW,无功功率为10 kvar;于0.7 s突加二极管整流负载。非线性负载进行补偿时,a相主要波形如图5和图6所示,直流侧电压波形如图7所示。

图5 SAPF系统a相主要波形Fig.5 The phase a waveforms of SAPF system
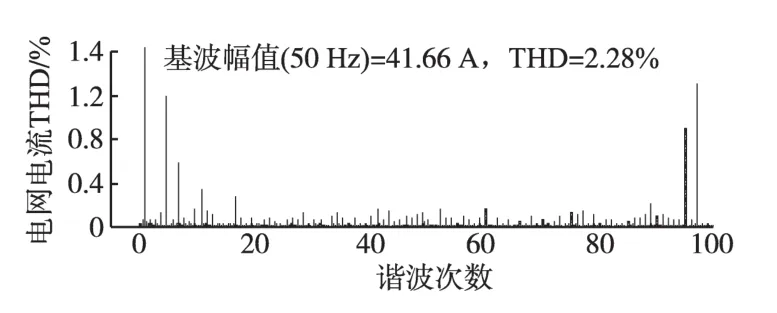
图6 0.7 s后电网a相电流谐波畸变率Fig.6 The phase a current THD of grid after 0.7 s

图7 SAPF系统直流侧电压Fig.7 The DC voltage of SAPF system
由图5可以看出,在补偿过程中电网电流与电网电压保持同相位,即达到了无功电流补偿、谐波电流抑制的目的,同时能够快速响应负载突变;由图6可以看出,经过补偿后电网电流的谐波畸变率为2.28%,能够满足电网对谐波抑制的要求。由图7可以看出,在负载突变后,直流电压出现较小跌落,但快速恢复至800 V,能够达到恒压控制的要求。
5 结论
通过建立和分析SAPF的数学模型,并针对传统PI控制器设计优化过程复杂的特点,将内模PI控制策略应用于SAPF。通过仿真分析,所提出的方法能够较好地补偿无功电流,抑制谐波电流,实现直流侧恒压控制,且电流和直流侧电压能够快速响应负载突变。此外,简化了PI控制器设计过程。
[1]王兆安,杨君,刘进军.谐波抑制和无功补偿[M].北京:机械工业出版社,1998.
[2]吴非,张延迟,解大,等.电力有源滤波器的技术现状[J].华东电力,2006,34(7):71-74.
[3]周雒维,张东,杜雄,等.一种新型的串联型有源电力滤波器[J].中国电机工程学报,2005,25(14):41-45.
[4]王军华,李建贵,汪友华.混合型有源电力滤波器研究现状与发展趋势[J].电气传动,2007,37(12):3-6.
[5]魏学良,戴珂,方昕.三相并联型有源电力滤波器补偿电流性能分析与改进[J].中国电机工程学报,2007,27(28):113-119.
[6]何英杰,刘进军,王兆安,等.三电平有源电力滤波器谐波电流跟踪无差控制方法[J].西安交通大学学报,2009,43(8):90-94.
[7]杨秋霞,梁雄国,郭小强,等.准谐振控制器在有源电力滤波器中的应用[J].电工技术学报,2009,27(4):171-176.
[8]刘威葳,丁洪发,段献忠.有源电力滤波器选择性谐波电流控制策略[J].中国电机工程学报,2011,31(27):14-20.
[9]杨君,王兆安,邱关源.并联型电力有源滤波器直流侧电压的控制[J].电力电子技术,1996(4):48-50.
[10]李俊,王大志,郭喜峰.一种有源电力滤波器直流母线电压模糊控制方法[J].电气传动,2011,41(6):23-26.
[11]孔令军,张晓,李晓迅.并联型有源电力滤波器直流侧电压模糊内模控制方法[J].电工技术学报,2011,26(S1):224-228.
[12]Harnefors L,Nee H P.Model-based Current Control of AC Machines Using the Internal Model Control Method[J].IEEE Transactions on Industry Applications,1998,34(1):133-141.
[13]董英,宋文祥,尹赟.基于内模控制的三电平PWM整流器控制方法[J].电气传动,2012,42(2):44-47.
猜你喜欢
通信电源技术(2018年3期)2018-06-26 08:05:48
火控雷达技术(2016年3期)2016-02-06 02:30:40
四川电力技术(2015年5期)2015-12-19 11:04:52
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:47
广西文学(2015年9期)2015-10-24 03:53:14
电源技术(2015年11期)2015-08-22 08:50:58
电测与仪表(2015年16期)2015-04-12 00:44:32
电测与仪表(2015年20期)2015-04-09 11:53:56
电测与仪表(2015年21期)2015-04-09 11:52:12
电测与仪表(2015年8期)2015-04-09 11:50:00