
快速区分目标与云雾的方法研究*
2014-09-20 09:27卫媛媛
弹箭与制导学报 2014年2期
卫媛媛,贺 伟
(西安邮电大学,西安 710065)
0 引言
扫描探测体制激光成像引信利用激光束探测目标,具有对目标的主动全向探测能力、探测视场方向尖锐、不易受电子干扰等特点。然而由于工作波段的原因,激光成像引信也受云雾,特别是空气悬浮粒子的后向散射影响较大。在复杂战场背景、导弹与目标高速交会的情况下,对云雾目标进行精确和快速的辨别比较困难[1],这也一直是激光成像引信发展和应用的“瓶颈”问题之一。国内外对此也提出了一些识别方法,文献[2]提出了利用曲线段特征、字块特征等方法进行目标局部图像识别。文献[3]提出了用矩不变特征进行飞机目标识别。文献[4]提出了一种基于形态点特征的方法进行目标识别。由于弹目交会时获得的是局部图像,信息比较少,交会姿态复杂,这些识别方法的适应性不强,辨别速度不够快,所以提出了一种根据目标角点和角点区域的矩形度来辨别云雾与目标的方法。
1 激光成像引信和常用目标特性识别方法
1.1 激光成像引信
激光成像引信主要由光学扫描机构、激光发射接收、目标辨别处理等单元组成。图1为激光成像引信示意图。激光成像引信可以获取目标的方位、局部几何形状、距离等信息。如何对目标图像进行处理,有效提取目标特征以实现快速辨别云雾和目标是激光引信的关键研究方向之一。
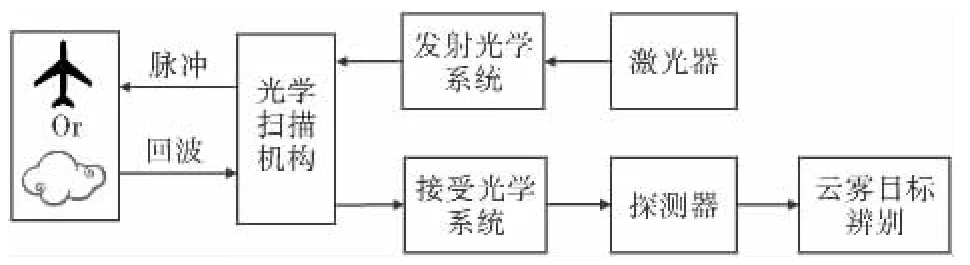
图1 激光成像引信探测装置的原理图
1.2 激光扫描建模
激光扫描过程并不是全覆盖,而是一种点覆盖,像素点之间存在着一定间隔[7]。为了能够在高速弹目交会时有效探测目标,为后续云雾目标辨别提供更准确的数字二值图像,下面对影响回波数据的因素进行建模分析,激光扫描探测区域示意图如图2。

图2 激光成像引信轴向扫描探测区域示意图
假设激光引信脱靶量a为5m,作用距离b为8m。在激光扫描点成像过程中,激光光束随着扫描电机棱镜的旋转,照射出一串的信号回波。随着棱镜扫描和导弹与目标的相对运动,目标各个部位进入探测区域从而完成对目标的探测。图3为目标探测到的扫描点的示意图。假设在飞机与导弹迎面飞行的极端情况下,相对高速弹目交会速度约为1000m/s或者更高,在弹轴方向上渡越距离为d=0.8m。
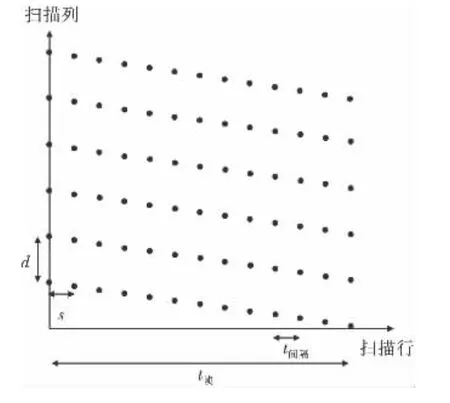
图3 扫描点分布
对于激光成像引信来说,探测距离不会太大,一般在十几米内。要满足实际高速弹目交会要求,激光成像引信至少应在交会时适时判断识别出目标。根据计算识别算法的实际处理时间应在8ms以内,为满足引战配合的需要,因此要求算法简单且快速。
1.3 常用目标识别特性
由于激光成像引信工作于特殊环境,探测到的目标图像极其复杂,且多是不完整的局部图像[6](见图4),所以只能通过诸多局部特征的提取来识别目标与云雾。常用的局部目标特征有不变矩、边缘特征、线矩等。

图4 各种交会条件下的飞机目标二值图像
1)不变矩
不变矩反映了物体灰度相对于质心的统计分布情况,具有平移、旋转和比例不变性,是表征不变量方面比较成熟的方法[3]。在二维不变矩中,常用的有阶数小于3的7个不变矩。但是由于这种方法是基于全局图像的,所以运算量比较大,而且它只能计算连续的轮廓,不能清晰的显示飞机目标的局部轮廓。
2)边缘特征
边缘是图像局部特征变化比较显著的部分,采用边缘检测获得的边缘点以及边缘线可以反映出目标的轮廓信息[2]。但是由于实际应用的运行速度需在8ms内,所以无法通过提取图像边缘特征快速的进行云雾目标辨别。
2 基于角点和矩形度的目标辨别
利用角点和矩形度进行目标辨别,包括角点特征的提取和角点区域矩形度的计算。
2.1 角点特征算法
角点是图像中灰度变化剧烈的点,包含位置、夹角、边界形状等丰富的信息而且相对要处理的数据量比较小。Harris算法应用比较广泛。
Harris角点检测是基于像素灰度变化的,角点附近往往是像素灰度值变化非常大的,梯度也非常大。若对二值图像数据上的点分别求取x、y方向上的灰度变化值,就可判断是否为角点。其中灰度变化度量的解析式设为:

式中:Ex,y为灰度变化量;ωx,y为一个高斯滑动窗口函数,用高斯函数代替二值窗口函数,对离中心点越近的像素赋予越大的权重,以减少噪声影响;I为图像的像素灰度值。寻找带有角点的窗口,需要搜索像素灰度变化较大的窗口,于是期望最大化Ex,y,将其化为二次型并进行对角化处理得到下式:

式(3)提取了两个特征值λ1、λ2,可以用来描述两个主要方向上信号的变化。将两个特征值混合计算得出单一的强度值R,这个值也就是Harris的角点响应函数R如下式:

R决定了这个窗口中是否包含了角点,当目标点的R大于给定的阈值,则该点为角点。Harris算法计算了每一个像素点上的R值,从而求出二值图像数据上的所有角点。
2.2 角点区域的矩形度
当目标的边界已知时,数学上可以用最小外界矩形来描述基本形状。先确定目标的主轴,再求出物体在主轴上的长度和与之垂直方向上的宽度,这样就得到目标的水平和垂直跨度,这也就是目标的最小外接矩形如图5所示。

图5 最小外界矩形
矩形度反映目标对其最小外接矩形的充满程度,也就是目标的面积与其最小外接矩形面积的比值用式(5)来描述:

其中:A0为目标的面积;AMER为最小外接矩形的面积。根据矩形度这个形状特征可以排除一些孤立的噪声干扰。
2.3 特征提取及识别流程
激光引信探测系统的工作原理和应用场合决定了其获取的飞机图像信息的分辨率不会很高[9]。但是在飞机边缘的交界处、被遮挡的边缘等部分一般都是稳定的、像素变化比较大的点。而角点正是两个边缘变化方向上变化比较大的点,利用这一点相似性可以检测出飞机目标。在各种高速弹目交会情况下,用Autodesk 3Ds Max软件对三维F-15战机进行模拟,用得到的二维图像矩阵进行方法的验证。经过上面的Harris角点特征分析得出:
1)一般情况下探测器接收到的云雾、小物体等干扰图像的矩阵信息多为随机、少数、孤立的噪声点,所以能提取到的角点数量是非常少的,几乎没有角点可提取。
2)飞机目标在迎头交会时最先扫描到的是前机身,然后是中机身和机翼,最后是发动机和尾翼。前机身部位主要是一条机头主轴和一些小突起,能够提取到一定角点。尾追交会由于激光光束先扫过尾翼、发动机区域,然后是机翼和中机身、前机身。尾翼较早出现,其影响区的灰度值与其它部位的灰度值差异较大,所以尾追交会时也会出现明显的角点特征。
为进一步排除干扰,需用角点区域矩形度进一步确定有角点特征的区域就是飞机目标。分析得到云雾干扰具有不确定性,外界矩阵大,矩形度小;飞机目标的角点较集中,其最小外界矩形相对较小,矩形度相对云雾大很多。根据以上的分析得出用角点特征和角点区域矩形度进行云雾目标辨别的流程见图6。
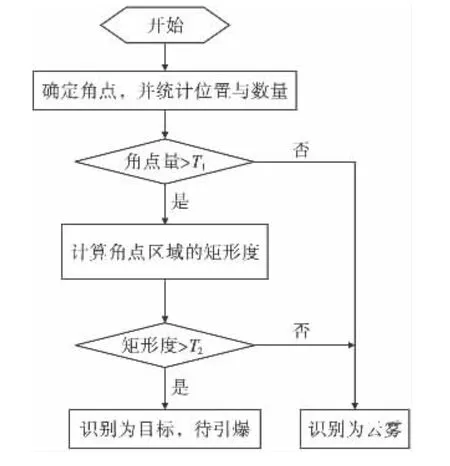
图6 云雾目标辨别流程图
其中,角点阈值T1、矩形度阈值T2是通过大量的实际测量数据得到。本项目是通过对比100个不同飞行姿态的飞机局部图像与模拟云雾图像的角点数量及矩形度最后得出阈值。处理的图像数量越多,得到的阈值越精确。
3 实验及仿真
通过Autodesk 3Ds Max软件对云雾、F-15战机各种飞行姿态进行模拟,用得到的大量局部飞机图像数据进行了图像处理。
3.1 不同扫描行对提取角点的影响
在相同的战机飞行姿态下,对不同的扫描行数图像数据提取角点见表1。假设图像中一个像素点为一个扫描点,每列都是40个像素,行像素则从10到30行递增代表扫描行数的增加。当扫描行数大于20行时可以识别出较为稳定的角点数量;当行数小于20行时,由于数据太少所以无法判断。所以后续仿真实验采用20行扫描数据来验证云雾目标辨别方法。
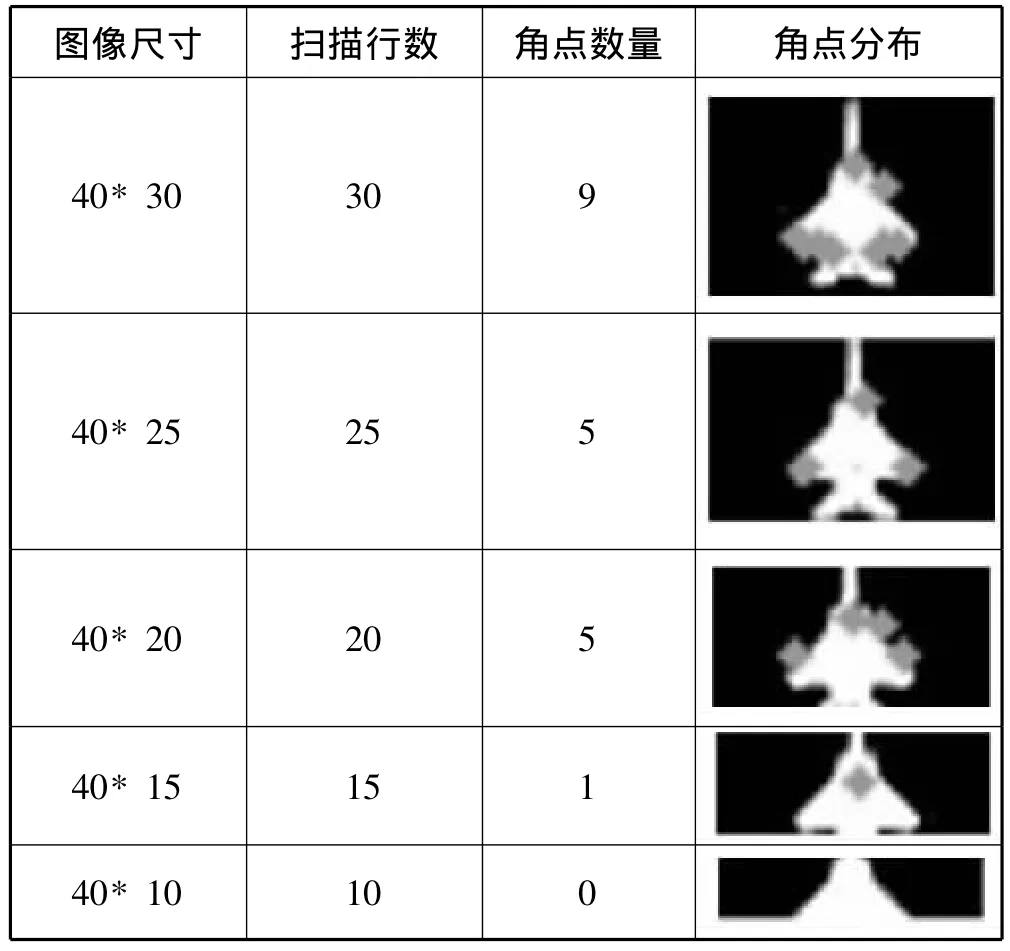
表1 不同扫描行的角点个数统计
硬件实现可以用高速DSP芯片。DSP执行一条指令的时间小于1ns。文中提出的角点算法是基于整幅图像数据来求灰度变化量,指令最多约20000条。假设每条指令10ns,在DSP上运行完算法需要0.2ms,可以达到高速弹目交会时云雾目标辨别的实际处理时间,与传统的识别方法相比速度要快。
3.2 模拟云雾与飞机目标的角点数差异
对相同扫描行数的数据图像提取角点,并计算角点数量,数据见表2。可以看出云雾的角点数量为0,与飞机的角点数量差异很大,大量计算得出一个阈值T1,当角点数量大于阈值则为飞机,小于阈值则为云雾。本实验取T1为1。

表2 飞行与云雾的角点数量差异
3.3 模拟云雾与飞机目标的矩形度差异
在角点提取的基础上,计算出角点分布区域的最小外接矩的矩形度,仿真数据见表3。可以得出飞机和云雾的矩形度是有很大差异的,大量计算得出一个阈值T2,当矩形度大于阈值则为飞机,小于阈值则为云雾。本实验取T2为7%。
3.4 不同姿态对提取角点的影响
对大量F-15战机各种飞行姿态进行模拟得到的测量数据分析。仿真结果显示角点多数分布在机头、机翼、机尾处、见表4。
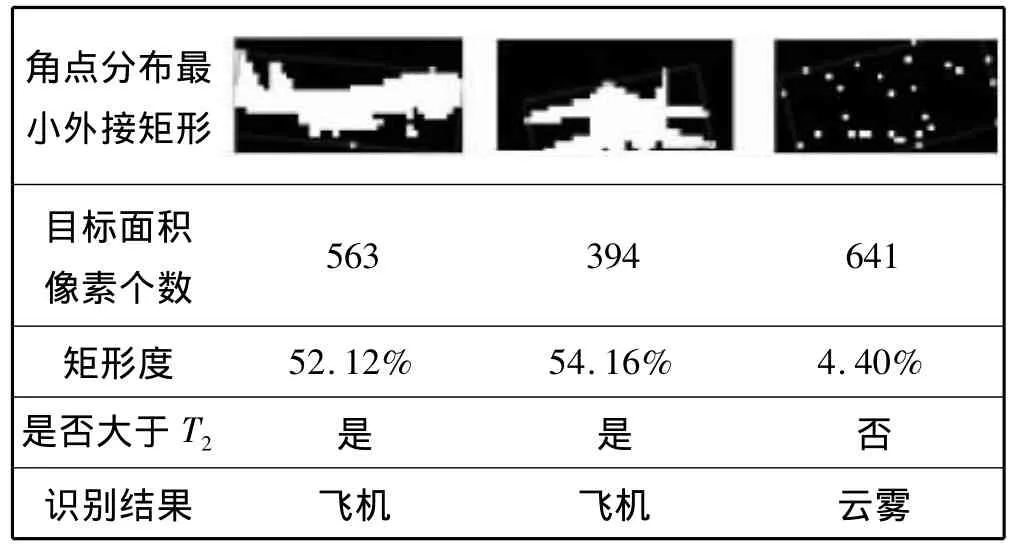
表3 飞行与云雾矩形度差异

表4 不同飞行姿态角点个数统计
通过对100个不同飞行姿态和不同角度的飞机局部图像的处理,结果表明93% 的目标物可以用提取出来的角点特征进行区分识别。
4 结论
文中提出了一种基于角点特征和角点区域矩形度的目标与云雾区分方法。该方法对仿真出来的目标矩阵图像提取角点,然后根据角点位置计算出角点区域的矩形度大小,最后用这两个值来辨别云雾目标。利用Autodesk 3Ds Max软件对F-15战机的各种飞行姿态进行模拟,用得到的图像数据进行方法验证。仿真结果表明,该方法比传统的目标特性识别方法具有明显的速度优势,可以实现快速区分云雾与目标,表明该特征具有一定的抗云雾干扰能力,很适合复杂战场环境需要。不足之处在于只是从战机模型的图像数据进行研究,在实际的应用中还有待于进一步的改进。
[1]徐永超,贺伟.基于变换探测功率的云雾后向散射识别[J].探测与控制学报,2013,35(1):25-28.
[2]王炎,郑链,王克勇.用于成像引信图像识别的局部特征提取技术[J].红外技术,2001,23(5),20-23.
[3]李迎春,陈贺新,杨建波,等.基于矩不变的飞机识别算法[J].吉林大学学报:信息科学版,2002,20(3):15-19.
[4]王刚,贺伟,董卫斌,等.一种基于形态点特征的目标识别方法[J].探测与控制学版,2010,32(6):18-22.
[5]Zunhua Guo,Shaohong Li,Weixin Xie.Automatic target recognition of aircrafts using translation invariant features and neural networks[C]//ICSP2008Signal Proceedings,9th Intermational Conferenceon,2008.
[6]SONG Chengtian,WANG Keyong,ZHENG Lian.An image processing system research on target and rendezvous status identification of missile and plane[C]//2008Congress on Image and Signal Processing,2008.
[7]魏斌,郑链,王克勇,等.用于近距目标探测的激光成像引信技术[J].激光杂志,2005,26(6):10-12.
[8]王克勇,宋承天,王炎,等.基于知识的飞机目标灰度图像部位识别方法研究[J].制导与引信,2003,24(1):49-52.
[9]邓甲昊.成像引信联合变换相关目标识别关键技术[J].探测与控制学报,2012,34(1):1-5.
猜你喜欢
音乐天地(音乐创作版)(2022年6期)2022-10-14
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
计算机仿真(2021年8期)2021-11-17
作文·小学低年级(2021年2期)2021-11-02
作文小学中年级(2021年2期)2021-03-15
中学生数理化·八年级数学人教版(2020年4期)2020-10-29
计算机系统应用(2020年1期)2020-01-15
电子技术与软件工程(2019年9期)2019-07-12
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
电子技术与软件工程(2018年10期)2018-07-16
