
三级磁阻型线圈发射器工作过程仿真研究*
2014-09-20 09:27孟学平李治源赵科义李耀龙
弹箭与制导学报 2014年2期
孟学平,雷 彬,李治源,赵科义,李耀龙
(解放军军械工程学院,石家庄 050003)
0 引言
磁阻型线圈发射器作为一种新型发射器[1],具有可控性好、安全系数高等优点,通过选择磁阻型线圈发射器不同的电路参数、弹丸触发位置、触发级数等相关参数,就可以方便的调节弹丸的出口速度[2],从而满足反恐防暴的应用需求。
美国Texas大学Austin分校机电研究中心开展了磁阻电磁发射器的理论和控制策略研究[3];波兰的B.Tomczuk和M.Sobol主要对磁阻发射器的磁场进行了分析[4];马来西亚的M.Rezal等进行了单级磁阻发射器的仿真与实验研究[5]。以上研究主要针对单级磁阻型线圈发射器展开,文中主要针对三级磁阻型线圈发射器的动态特性进行仿真研究,重点分析了触发位置对发射器的弹丸出口速度及能量转换效率的影响,研究成果将为后续多级磁阻型线圈发射器的设计及试验提供指导,进而为磁阻型线圈发射器的小型化、集成化奠定基础。
1 发射器原理及控制策略
1.1 多级发射器原理分析
多级磁阻型线圈发射器可以看作由一系列单级磁阻型线圈发射器组成,以三级磁阻型线圈发射器为例进行说明,如图1所示。三级磁阻型线圈发射器由铁磁性弹丸、驱动线圈、发射管、脉冲储能电容器(C1、C2、C3)、触发开关(SCR1、SCR2、SCR3)组成。给定弹丸的初始触发位置,利用充电机为脉冲储能电容器
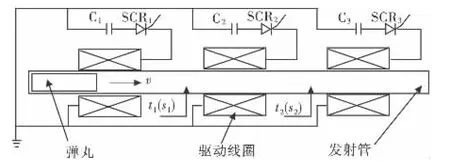
图1 三级磁阻型线圈发射器原理图
C1、C2、C3充电,通过手动触发方式使触发开关SCR1导通,脉冲储能电容器C1经过驱动线圈放电,铁磁性弹丸在第1级驱动线圈的电磁力作用下朝着图示方向运动;当运动到第2(3)级驱动线圈时,计数器或者光电传感器向触发开关SCR2(SCR3)发出触发信号并使其导通,脉冲电容器C2(C3)经过驱动线圈放电,弹丸在相应驱动线圈电磁力作用下继续向前运动,直至脱离发射管。
忽略空气阻力及摩擦力,弹丸在每级驱动线圈内的加速过程可以表示为:

式中:FP表示弹丸所受到的电磁力;m为弹丸质量,a为弹丸加速度;v1为t1时刻速度;v2为t2时刻速度,Δt为时间增量;Δv为Δt内的速度增量。
可以得出,在弹丸质量一定的条件下,弹丸经过每级驱动线圈后的速度变化主要与电磁力及其作用时间有关。
磁阻型线圈发射器的能量转换效率定义为弹丸动能增量与脉冲储能电容器原始储存电能之比[8],用η表示,其计算公式如下:
式中:WM表示弹丸动能增量;WC表示脉冲储能电容器的初始储存电能;m表示弹丸质量;v1表示弹丸初速;v2表示弹丸出口速度,C表示电容器的容量值;U表示电容器的初始电压。
1.2 多级触发控制策略
多级触发控制策略一般有时间触发方式和位置触发方式两种。时间触发的原理比较简单,通过仿真或试验确定不同弹丸初速对应的最佳触发位置,并利用位置和弹丸速度计算出弹丸运动到每级驱动线圈最佳触发位置所需要的时间。
位置触发即为通过位置来控制每级驱动线圈放电,位置检测一般通过光电对管或者激光器来实现。其基本原理为:通过手动控制第1级驱动线圈的触发放电,触发放电后,弹丸受力开始向前运动。当弹丸的头部运动到光电对管所在位置时,将光信号截断,使得光通路断开,光电管发出高电平信号,并传输给触发控制系统,弹丸继续向前运动,当弹丸的尾部运动离开激光器所在位置时,光通路恢复,触发控制系统再次接收低电平信号。触发控制系统检测到电平由低向高跳变的上升沿时,发出触发控制信号,使该级驱动线圈的可控硅开关同步触发放电,实现多级磁阻型线圈发射器的触发控制。
在实际的多级磁阻型线圈发射器设计与试验中,多采用位置触发的方式,提高控制精度。因此,本研究采用位置触发方式,利用Ansoft有限元仿真软件,来实现三级磁阻型线圈发射器的工作过程仿真研究。
2 仿真研究
2.1 仿真结构及参数设置
电磁场仿真软件Ansoft可以自动考虑部件形状、相对位置及材料特性对电感等参数计算的影响,解决直接计算参数的难题[6-7]。因此,文中借助电磁场有限元仿真软件Ansoft中的2D瞬态场求解器,对三级磁阻型线圈发射器工作过程进行仿真分析。

图2 动态仿真模型

图3 网格剖分
图2给出了三级磁阻型线圈发射器的仿真模型,包括运动区域、求解区域、驱动线圈及弹丸。图3给出了仿真区域的网格剖分情况,从图中可以看出,为了保证仿真计算精度,弹丸、驱动线圈及运动区域的网格划分比较密集。

图4 脉冲电压源设置
仿真过程中,通过外接电路的方式为驱动线圈加载。外接电路中,共有3个脉冲储能电容器,脉冲储能电容器的电压均设置为600 V,C1的电容设置为600 μF,C2、C3的电容设置为400 μF,3 个驱动线圈的电阻均为0.408Ω,第2、3级电路中,采用压控开关S_V2、S_V3来实现位置触发,触发源采用脉冲电压源V2、V3,脉冲电压源及其参数设置如图4所示,位置触发通过调整Td的数值来实现。
2.2 仿真结果及分析
本研究中,位置触发通过设置脉冲电压源中的Td来实现,由前期单级磁阻型线圈发射器的动态仿真分析,确定第1级弹丸的最佳触发位置,并将弹丸放置在该位置;然后根据磁阻型线圈发射器的加速原理及前期大量试验情况,确定第2、3级弹丸的触发位置范围,触发位置用弹丸位移Z来表示,取Z1=30~75 mm,Z2=95~140 mm,变化步长均为5 mm,进行仿真。选取 Z1=45 mm、Z2=110 mm,Z1=55 mm、Z2=120 mm,Z1=75mm、Z2=140mm3组典型触发位置进行分析。

图5 触发位置对驱动电流的影响
图5给出了三级磁阻型线圈发射器在3个不同触发位置时的驱动电流曲线。从图中看出,第1级驱动电流曲线基本重合,说明触发位置不同对驱动线圈的级间相互影响很小,通过单级驱动线圈的驱动电流曲线可以证实级间耦合作用很小;第2、3级驱动电流的曲线变化趋势基本相同,且驱动电流峰值及周期基本一致,只是触发时刻有所不同,这是由触发位置的不同所决定的,触发位置不同,弹丸到达同一位置的时刻就不相同,故会出现触发时刻不同。
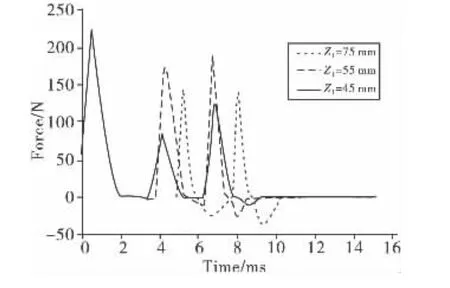
图6 触发位置对电磁力的影响
图6给出了三级磁阻型线圈发射器在3个不同触发位置时的电磁力曲线。对每一个触发位置,都出现了3次正向电磁力,说明弹丸受到三级驱动线圈加速。由图可以看出,3个触发位置对应的三级正向电磁力峰值分别为222.90 N、84.71 N、123.46 N;222.90 N、174.68 N、187.34 N;222.90 N、147.33 N、141.58 N。Z1=45 mm,Z2=110 mm时,第1、2级电磁力曲线均为正向电磁力,第3级电磁力曲线开始出现负向电磁力,负向电磁力峰值为 -8.94 N,且持续时间较短;Z1=55 mm,Z2=120 mm时,第1级电磁力曲线为正向电磁力,第2级电磁力曲线开始出现负向电磁力,负向力峰值为-9.52 N,且幅值和持续时间均不大,第3级电磁力曲线出现明显的负向电磁力,负向电磁力峰值为-25.19 N,且持续时间较长;Z1=75 mm,Z2=140 mm时,第1级电磁力曲线为正向电磁力,第2、3级电磁力曲线均出现明显的负向电磁力,所对应的负向电磁力峰值分别为 -24.01 N、-32.87 N,且持续时间均较长。正向电磁力和负向电磁力的大小及持续时间长短,主要是由弹丸与驱动线圈间的相互位置所决定的,当弹丸中心位于驱动线圈中心之前时,且驱动电流存在,电磁力表现为正向加速力;当弹丸中心经过驱动线圈中心时,若驱动线圈中仍有电流,就会对弹丸的运动起阻碍作用,电磁力表现为负向减速力,这就是负向电磁力产生的原因。
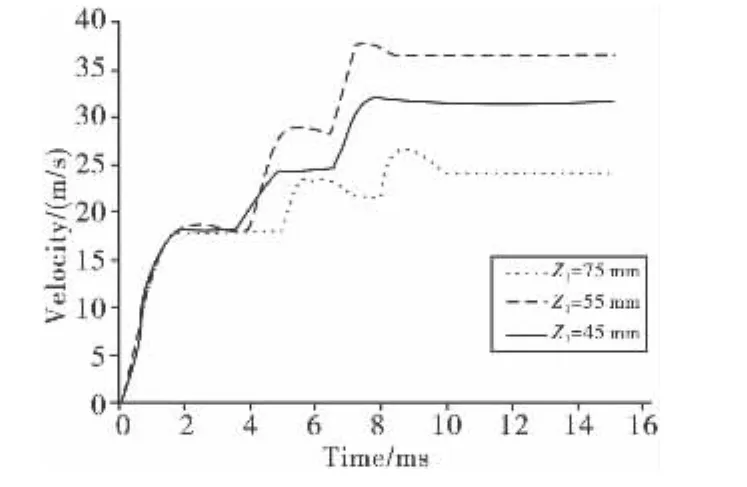
图7 触发位置对弹丸速度的影响
图7给出了三级磁阻型线圈发射器在3个不同触发位置时所对应的弹丸速度变化曲线。由图可以看出,Z1=45 mm,Z2=110 mm时,经过三级驱动线圈电磁力作用,弹丸速度呈现一直增加的趋势;Z1=55 mm,Z2=120 mm时,在第1、2级驱动线圈电磁力作用下,弹丸速度呈现增加的趋势,在第3级驱动线圈电磁力作用下,弹丸速度呈现先增大后减小最后稳定的趋势;Z1=75 mm,Z2=140 mm时,在第1级驱动线圈电磁力作用下,弹丸速度呈现不断增加的趋势,当弹丸经过第2、3级驱动线圈时,速度均呈现先增大后减小的趋势。经过三级驱动线圈电磁力作用,当Z1=55 mm,Z2=120 mm时,弹丸获得最大的出口速度,最大出口速度为36.39 m/s。根据冲量原理,弹丸的速度增量主要是由弹丸所受到的整体电磁力大小及其作用时间所决定的。Z1=45 mm时,弹丸受到的电磁力基本为加速力,但是电磁力总体较小;Z1=75 mm,Z2=140 mm时,弹丸虽然受到较大的正向电磁力,但在第2、3级时受到了较大的负向减速力,故速度增量较小;Z1=55 mm,Z2=120 mm时,弹丸受到的正向电磁力总体较大,同时只在第3级出现较大的负向减速力,而正向电磁力的加速效果远大于负向减速力的减速效果,故弹丸获得最大出口速度。
通过对三级磁阻型线圈发射器的工作过程仿真,得到图8所示的能量转换效率曲线。从图中看出,能量转换效率随着Z值的增大,呈现先增大后减小的趋势,当Z1=57.73 mm,Z2=122.73 mm时,系统的能量转换效率达到最大,最大值为4.94%。
3 结束语
文中重点对三级磁阻型线圈发射器的工作过程进行了仿真研究。仿真分析得出,触发位置对发射器驱动电流影响很小,而对电磁力的影响较大;本研究中,当Z1=57.73 mm,Z2=122.73 mm时,发射器的弹丸出口速度达到最大,速度峰值为37.26 m/s,同时系统的能量转换效率达到最大,效率值为4.94%。仿真结果表明,在多级磁阻型线圈发射器加速弹丸的过程中,每一级驱动线圈都存在最佳的触发位置,使得弹丸出口速度及能量转换效率达到最大;如何匹配各级线圈之间的触发位置,是多级磁阻型线圈发射器设计及试验的关键;在发射器的实际设计与试验过程中,要从初级驱动线圈开始,逐级寻找每级驱动线圈对应的弹丸最佳触发位置,使各级的能量转换效率达到最大,从而实现多级磁阻型线圈发射器整体能量转换效率的最大化。
[1]王莹,肖峰.电炮原理[M].北京:国防工业出版社,1995:5,15,174 -178.
[2]支彬安,雷彬,李治源,等.非线性等效电感对磁阻驱动器驱动性能的影响[J].弹箭与制导学报,2011,31(1):173-176.
[3]SK Ingram,SB Pratap.A control algorithm for reluctance accelerators[J].IEEE Transactions on Magnetics,1991,27(1):156-159.
[4]B Tomczuk,M Sobol.Field analysis of the magnetic systems for tubular linear reluctancemotors[J].IEEE Transactions Plasma Science,2005,41(4):1300 -1305.
[5]M Rezal,S J Iqbal,K W Hon.Development of magnetic pulsed launcher system using capacitor banks[C]//The5th Student Conference on Researchand Development,2007.
[6]赵科义,李治源,程树康.单级感应线圈炮工作过程的动态仿真[J].高电压技术,2008,34(8):1667-1671.
[7]赵博,张洪亮,等.Ansoft 12在工程电磁场中的应用[M].北京:中国水利水电出版社,2010:130-153.
[8]刘文彪,曹延杰,张媛,等.基于蚁群算法的同步感应线圈炮结构参数优化[J].兵工学报,2011,32(11):1416-1422.
猜你喜欢
大电机技术(2022年5期)2022-11-17
重庆理工大学学报(自然科学)(2022年9期)2022-10-26
防爆电机(2021年6期)2022-01-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年4期)2021-07-28
兵器知识(2020年11期)2020-11-18
兵器知识(2019年1期)2019-01-23
汽车维护与修理(2018年3期)2018-12-07
电子制作(2018年19期)2018-11-14
小猕猴智力画刊(2018年7期)2018-08-08
