
类人型五指手构型的优化设计
2014-09-18 06:39:36樊绍巍陈川姜力曾博刘宏邱景辉
哈尔滨工程大学学报 2014年5期
樊绍巍, 陈川, 姜力 , 曾博, 刘宏, 邱景辉
(1. 哈尔滨工业大学 机器人技术与系统国家重点实验室, 黑龙江 哈尔滨150001;2. 哈尔滨工业大学 电子与信息工程学院,黑龙江 哈尔滨 150001)
类人型五指手的构型是由手指指节的长度、指节运动关系以及手指在手掌上的位置参数决定。而构型设计的优劣决定手的抓取和操作能力。但因其多链路特点,导致结构参数多、参数间关联性强,因此如何设计一组符合功能要求的五指手构型成为五指手设计领域一个很大的难题。目前通常的做法有3种:1)在设计具体机械结构的同时摸索五指手的构型,如文献[1-6]中先根据设计功能要求以及动力传动组件等硬件参数建立出三维CAD模型,然后利用CAE软件完成对主要设计功能的仿真,最后根据仿真结果进一步完善构型设计参数;2)重点对某一两个相对重要的手指进行参数优化设计,如文献[7-8]中利用刚体动力学对拇指抓握进行的分析以及文献[9]中欠驱动两指抓取的平面几何学研究;3)研究对比人手的生理特性[10],通过建立和分析人手的DH模型来指导五指手的构型优化设计,缺点是对硬件设备要求较高,且无较强的理论基础。以上3种方法均不同程度地进行了五指手的构型优化设计,而采用基于形封闭理论的设计方法,相比之下具有优化参数全面、可维护性强以及成本低的特点,从而为五指手构型的优化设计提供了一种新的思路。
五指手的抓取从功能上可分为强力抓取和精巧抓取2种,前者又可细分为球形抓取、圆柱形抓取和钩形抓取[7,11]。相对于其他抓取形式,球形抓取和圆柱形抓取所涉及的手指最多,抓取的范围也最大,功能实现也最为复杂。这2种强力抓取成功与否直接决定了五指手构型设计的合理程度。形封闭是单纯从几何结构参数的角度出发来判断抓取的结果[12-13],相对于力封闭而言条件更强,符合形封闭设计要求的假手抓取范围更大、适应性更好,并被经常用来作为抓取参数优化的理论依据。
五指手构型设计除了理论分析计算得到构型参数外,还受到机构设计、电机选型以及功能要求的限制[14-15]。因此,本文结合上述限制条件,基于形封闭策略及参数的范数域宽对其参数进行优化,从而保证类人型的同时增加五指手的抓持稳定性。
1 形封闭性的判定原理

(1)
定义抓取G的形封闭判别函数J0(G)为下列线性规划问题的最小值[16]。
(2)
其中,可行集Ω0是下列不等式组的集合:
(3)
式中:i=1,2,...,m;j=1,2,...,n,n+1;y=[y1y2...yn]T和yn+1是人工控制变量;m、n分别是接触点线矢量p的个数和维数。
2 强力抓取的形封闭性分析
2.1 模型假设
在建模过程中,剔除一些对结果影响小,却大大增加算法复杂度的参数,假设如下:
1) 被抓物体是绝对刚体,且接触面没有摩擦;
2) 五指均为全耦合设计,且耦合比为1∶1;
3) 近指节和中指节为通用指节,无名指和食指相对中指对称;
4) 五指和被抓物体的接触点在五指的几何中心面内;
5)手指远指节和中指节夹角很小,忽略不计。
五指手的构型简图如图1所示(图1中仅表示出了拇指和食指的参数,其余3指与食指类似)。

图1 五指手构型
2.2 圆柱形抓取和相对形封闭分析
相对形封闭是形封闭在二维空间下的特例,此时点接触线矢量p的维数为3,且同样适用于J0(G)判别函数判别原理。
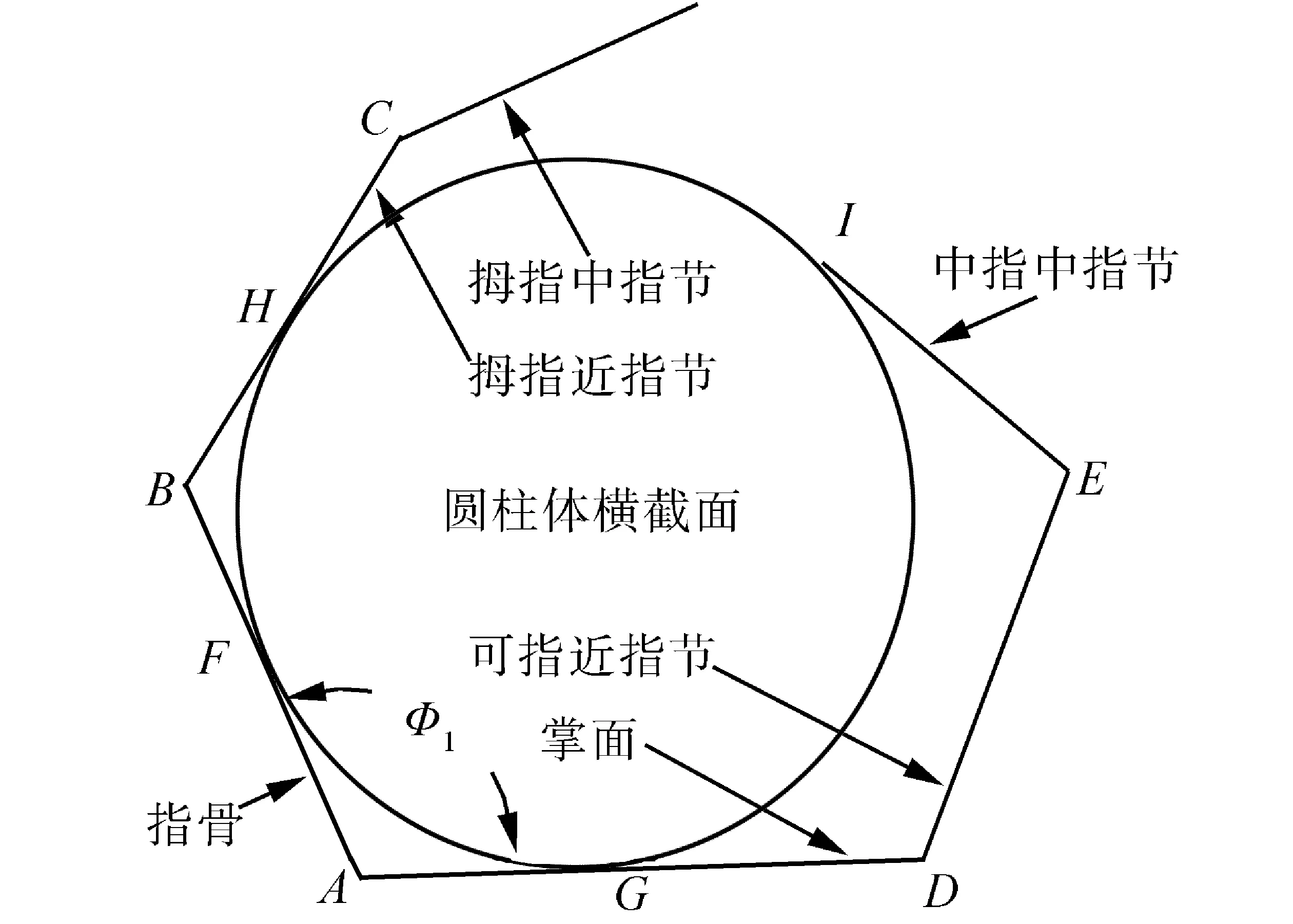
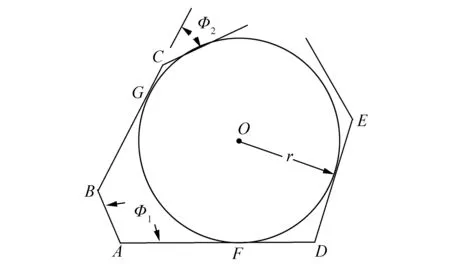
图2 圆柱形抓取
当假手强力抓取圆柱形物体时,被抓物体的理论截面为圆形,因此位于拇指-掌面-中指所在平面的圆形截面满足相对形封闭判据时,则近似认为五指手对该半径下的圆柱体抓取符合相对形封闭要求,如图2,相对形封闭分析的流程图如图3。
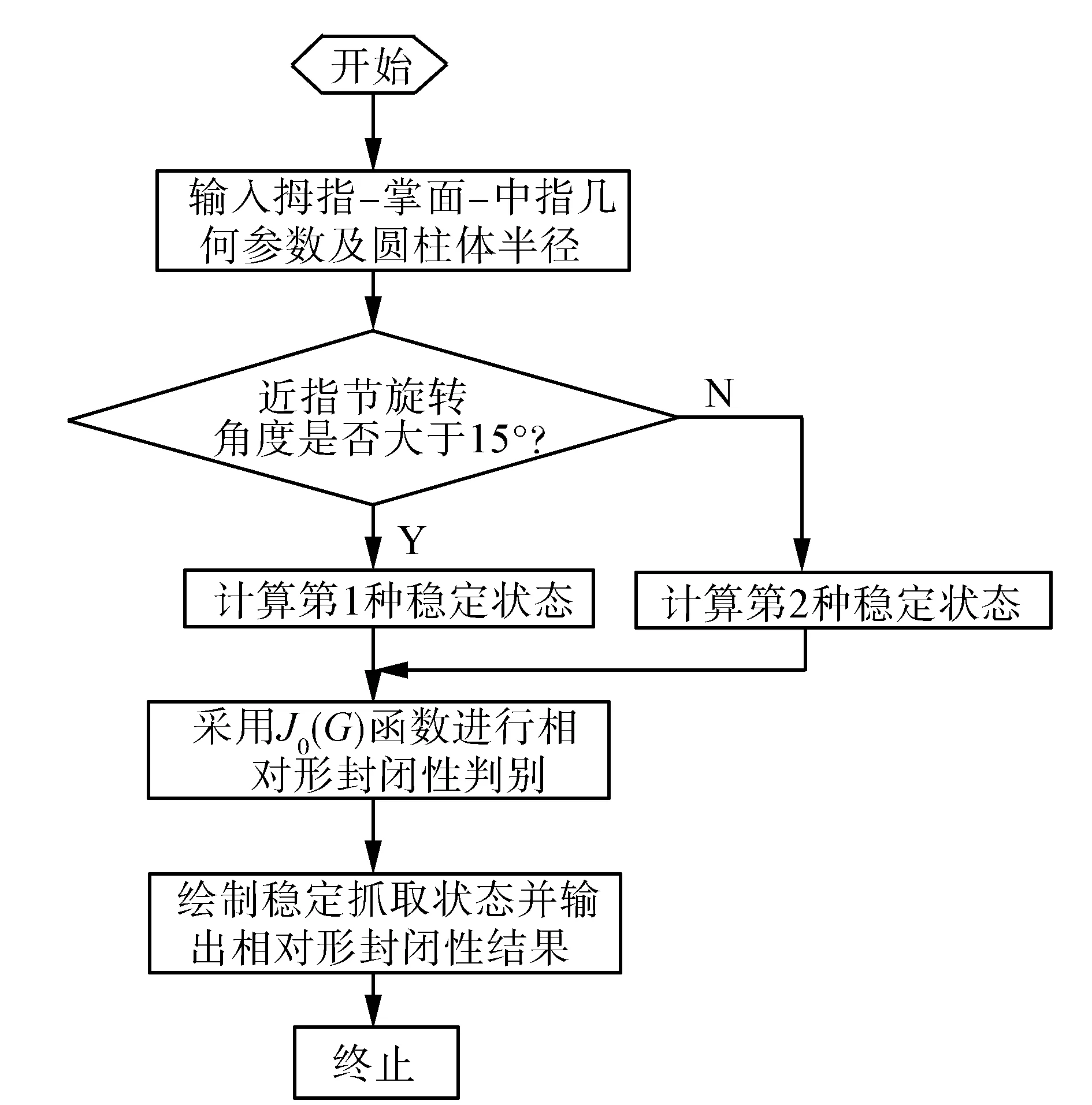
图3 相对形封闭性分析流程图
具体分析过程如下:
1)保持指骨和掌面间的夹角φ1恒定,依次计算出接触点F和G;
2)判别是否满足形封闭要求;
3)若AB、r及φ1满足式(4)时,可实现如图4(a)抓取稳定状态:
(4)
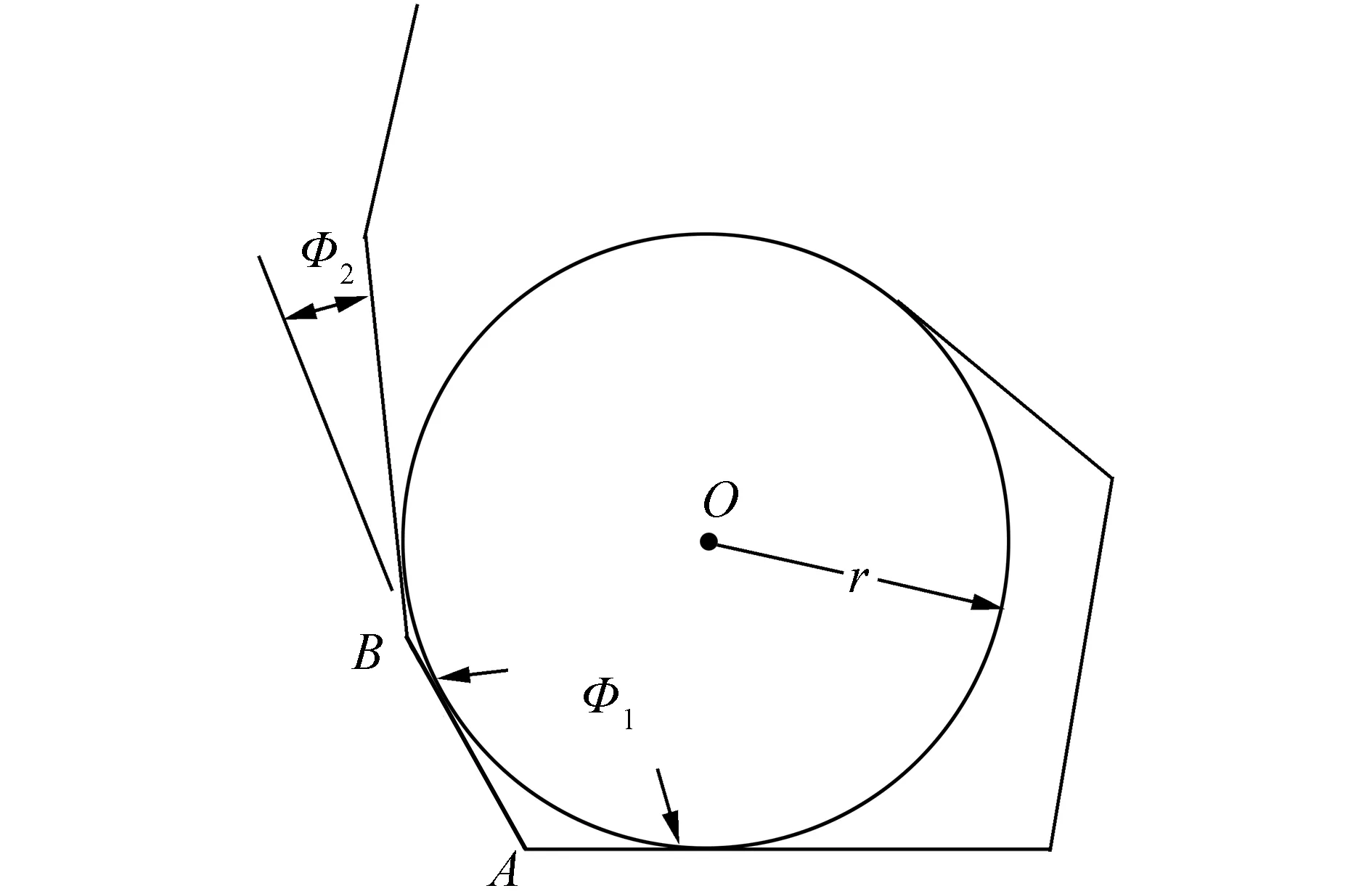
若满足
(5)
可实现如图4(b)抓取稳定状态,并由
(6)
(7)
(8)
确定接触点F和G的位置和转角φ2的值。
4)再次循环J0(G)判别函数。
(a) 状态1
(b) 状态2
2.3 球形抓取和形封闭
球形抓取属于三维形封闭问题,所以点接触线矢量p的维数为6,且同样适用于J0(G)判别函数判别原理,其相对形封闭分析的流程图如图5。
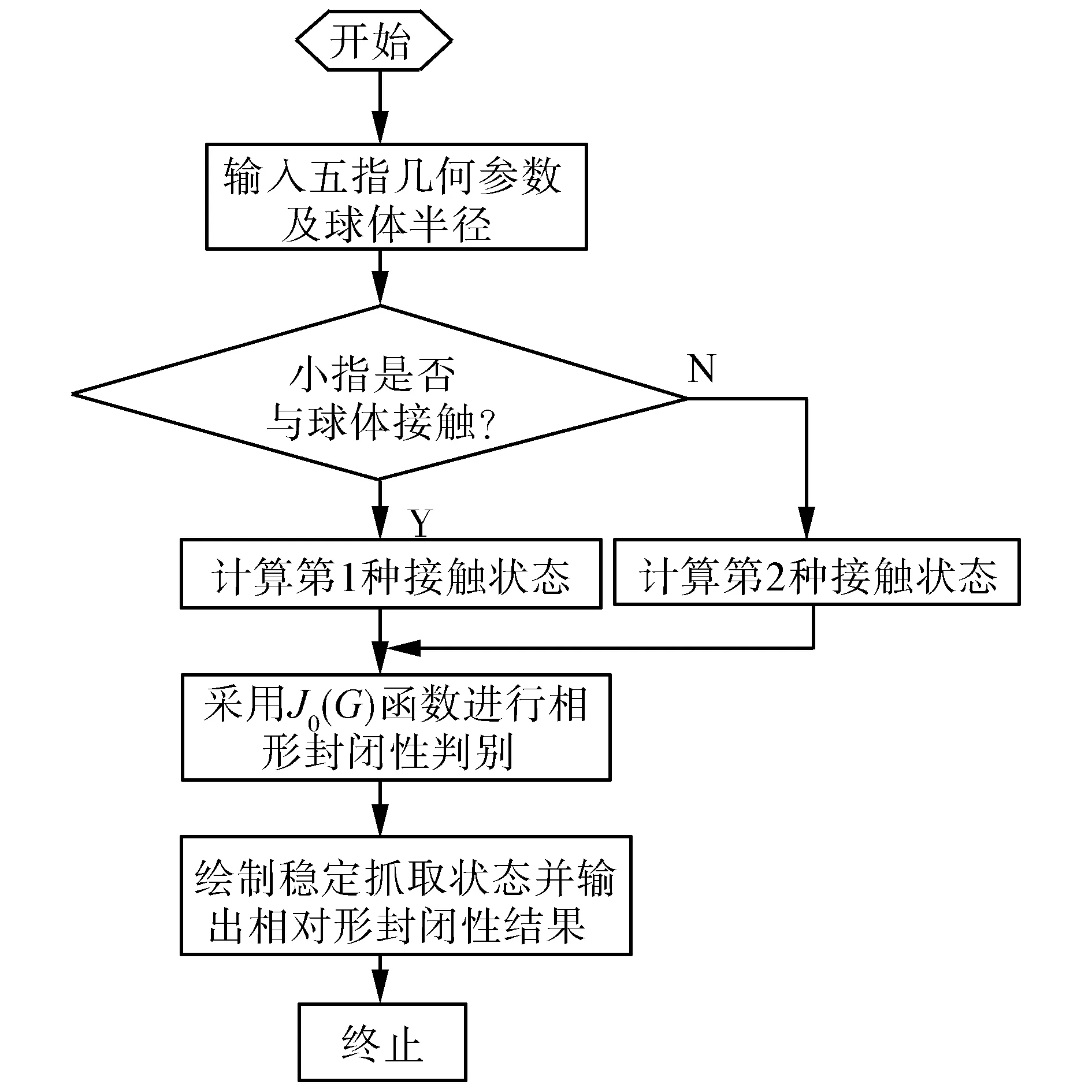
图5 形封闭性分析流程图
(a) 小指不接触球体
(b) 小指接触球体
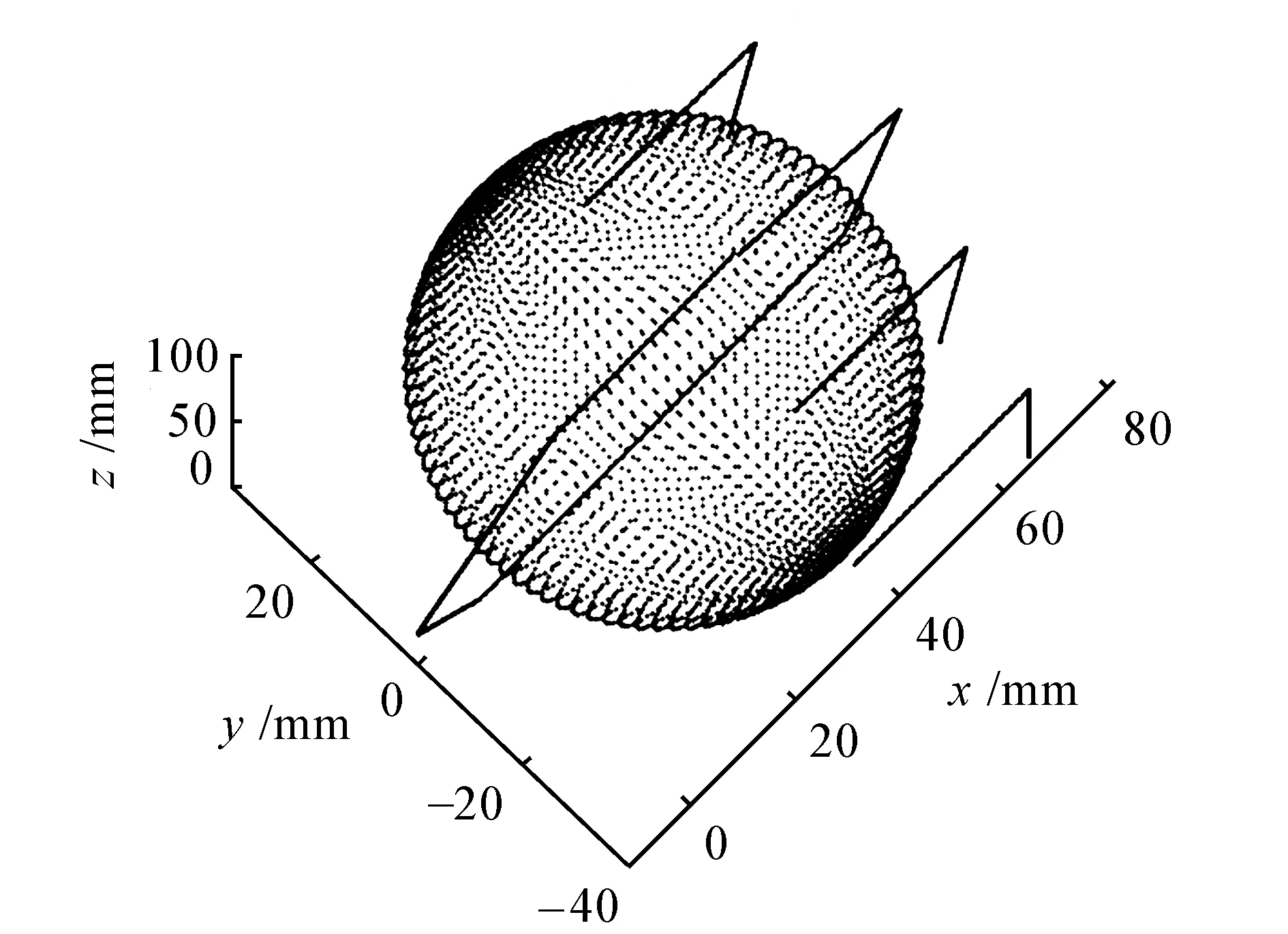
结合上述假设情况使球体的最大截面和拇指-掌面-中指所在面重合,依次计算各个手指和球体的接触点,并使用J0(G)判别函数进行三维形封闭性分析。稳定判别分为rb≤2Lp时6点接触和rb≥2Lp时7点接触2种情形。其中rb为球体直径,Lp为手掌宽度。 抓取仿真如图6所示。其他计算过程和圆柱形抓取类似,不再赘述。
3 五指手构型优化设计
3.1 参数优化设计性能指标
如上所述,最大可行区间是在一定的抓取环境且符合抓取形封闭性的前提下,单一参数进行改变的最大区间。定义某参数i的域宽δi为其最大可行区间长度除以区间中点的绝对值,它是一个无量纲区间参数,客观的描述了不同参数的最大可行区间的相对大小。定义n个参数的范数域宽δ为
(9)
δ值能够反映该组参数的最优程度。实验证明,若所选参数正好位于其最大可行区间中点,则该组参数δ值最大。采用区间迭代算法找到n个给定的处于最大可行区间中点的参数,优化迭代过程可简化描述为:基于区间迭代算法对n个参数分别进行可行区间迭代,得到参数的无量纲区间参数δi及中间值后,计算n个参数变换后的δ值后,再重复进行迭代直至最大可行区间不再变化。
3.2 区间最大化实例
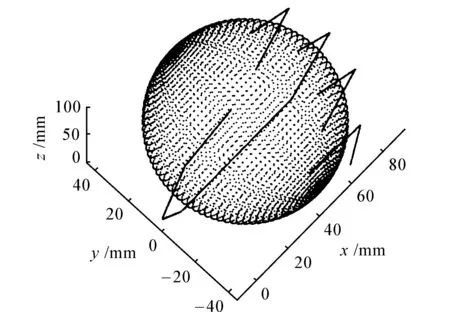
为了直观表述上述方法,以半径35 cm的球形抓取为例,选择五指手的11个参数中的5个关键参数作为优化的目标参数。其初始数值、迭代过程以及最终优化结果如图7、8所示。 为了表述优化后手指构型的泛化能力,选取5组半径球体进行迭代实验,其优化的前后范数域宽δa、δb及增长率γ如表1所示。优化后的抓握仿真及效果如图9所示。

图7 迭代过程

图8 构型参数域宽
表1 迭代试验结果
(a) 基于优化参数的抓取构形仿真

(b) Adams抓取示例
4 结论
本文给出了五指手构型设计合理性的评价标准,以及构型参数设计合理性的方法,对于类人型五指机器手具有实际操作性,结果表明:
1)针对抓持性物体,基于几何形封闭理论优化的五指手抓取构型能够提升假手的抓持能力。为后继的抓取分析提供了有力的理论支撑。
2)范数域宽的引入为手掌构型及手指参数的合理性提供了评价指标
3)最大可行区间通过不同参数的域宽能够判断出不同参数之间的最大可行区间的相对大小,从而在后期机械设计选型时做到有的放矢。
参考文献:
[1]HUANG Hai, JIANG Li, PANG Yongjie, et al. Observer-based dynamic control of an underactuated hand[J]. Advanced Robotics,2010, 24:123-137.
[2]BENNET D A, DALLEY S A, GOLDFARD M. Design of a hand prosthesis with precision and conformal grasp capability[C]// 34th Annual International Conference of the IEEE EMBS. San Diego, USA, 2012:3044-3047.
[3]DALLEY S A, WISTE T E, VAROL H A, et al. A multigrasp hand prosthesis for transradial amputees[C]// 32nd Annual International Conference of the IEEE EMBS. Buenos Aires, Argentina, 2010:5062-5065.
[4]CIPRIANI C, CONTROZZI M, CARROZZA C.Progress towards the development of the SmartHand transradial prosthesis[C]//IEEE 11th International Conference on Rehabilitation Robotics. Kyoto, Japan, 2009:682-687.
[5]MASSA B, ROCCELLA S, CARROZZA M C,et al. Design and development of an underactuated prosthetic hand[C]// International Conference on Robotics & Automation. Washington, USA, 2002:3374-3379.
[6]HAMMOND F L, WEISZ J, ANDRES A,et al. Towards a design optimization method for reducing the mechanical complexity of underactuated robotic hands[C]// IEEE International Conference on Robotics and Automation. Minnesota, USA, 2012:2843-2850.
[7]WANG Hairong, FAN Shaowei, LIU Hong. An anthropomorphic design guideline for the thumb of the dexterous hand[C]// International Conference on Mechatronics and Automation. Chengdu, China, 2012: 777-782.
[8]黄海, 姜力, 侯琳琪,等. HIT/DLR仿人假手拇指机构的研究[J]. 哈尔滨工程大学学报, 2007, 28(2): 207-211.
HUANG Hai, JIANG Li, HOU Linqi,et al. Thumb mechanism of HIT bio-prosthetic hand [J]. Journal of Harbin Engineering University, 2007, 28(2): 777-782.
[9]KRAGTEN M, FRANS C T, HELM V D, et al. A planar geometric design approach for a large grasp range in underactuated hands[J]. Mechanism and Machine Theory, 2011, 46: 1121-1136.
[10]SHIN S,HAN S,LEE K,et al. A design framework for dexterous robotic hand[C]// International Conference on Ubiquitous Robots and Ambient Intelligence. Incheon, Korea, 2011:539-541.
[11]ZHENG J Z, ROAS S, DOLLAR A M.An investigation of grasp type and frequency[C]// International Conference on Robotics and Automation.Shanghai, China, 2011: 4169-4175.
[12]左炳然, 钱文瀚. 基于形封闭定量分析的最优抓取[J]. 上海交通大学学报, 1997, 31(12): 90-94.
ZUO Bingran, QIAN Wenhan. The optimal grasp based on quantitative analysis of form-closure[J].Journal of Shanhai Jiaotong University, 1997, 31(12): 90-94.
[13]秦志强, 赵锡芳, 李泽湘. 机器人多指爬取的力封闭判别[J]. 上海交通大学学报, 1999, 33(7): 858-861.
QIN Zhiqiang, ZHAO Xifang, LI Zexiang. On the force closure of robotic multifingered grasp[J].Journal of Shanhai Jiaotong University, 1999, 33(7): 858-861.
[14]樊绍巍, 刘伊威, 金明河,等. HIT/DLR Hand类人形五指灵巧手机构的研究[J]. 哈尔滨工程大学学报, 2009, 30(2): 171-177.
FAN Shaowei, LIU Yiwei, JIN Minghe,et al. Research on the mechanics of the HIT/DLR Ⅱ:hand anthropomorphic five-finger dexterous hand[J]. Journal of Harbin Engineering University, 2009, 30(2): 171-177.
[15]CIPRIANI C, CONTROZZI M, CARROZZA M C. Progress towards the development of the smart hand transradial prosthesis[C]//IEEE 11th International Conference on Rehabilitation Robotics. Kyoto, Japan, 2009: 682-687.
[16]熊有伦. 点接触约束理论与机器人抓取的定性分析[J].中国科学, 1994, 24(8): 874-883.
XIONG Youlun. The point contact constraints theory and the qualitative analysis of robot grasping[J]. Science in China, 1994, 24(8): 874-883.
猜你喜欢
网络安全技术与应用(2022年5期)2022-07-26 03:04:58
健康护理(2022年3期)2022-05-26 23:59:52
西南石油大学学报(自然科学版)(2019年4期)2019-11-04 00:34:20
中国特种设备安全(2019年5期)2019-07-16 08:51:42
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:26
中国科技纵横(2018年3期)2018-03-15 00:27:35
中国设备工程(2017年11期)2017-06-29 12:00:51
创造(2016年5期)2016-02-01 00:44:09
海南热带海洋学院学报(2014年2期)2014-08-08 12:49:48
断块油气田(2014年5期)2014-03-11 15:33:41
