基于改进Canny算子的煤矿井下物体图像边缘检测方法研究
2014-09-15 01:23尚长春马宏伟安静宇
计算机工程与科学 2014年3期
尚长春,马宏伟,安静宇
(西安科技大学工程训练中心,陕西,西安 710054)
基于改进Canny算子的煤矿井下物体图像边缘检测方法研究
尚长春,马宏伟,安静宇
(西安科技大学工程训练中心,陕西,西安 710054)
针对传统的Canny 算子检测井下物体低强度边缘能力不足的问题,提出了一种改进的边缘检测算法。该算法从以下三个方面进行改进:(1)采用一种新的四阶偏微分方程的降噪算法对图像去噪,进一步提高降噪效果,且在降噪过程中较好地保留图像细节,使井下物体更容易被检测。(2)采用自适应阈值的方法对图像边缘进行检测,实现了双阈值的自适应提取,能够较好地提取真实边缘。特别是在低对比度图像的边缘提取上,此方法更具有优势。(3)基于模糊判决的理论,在传统的Canny算法的基础上提出了一种有效的边缘连接方法。为了验证Canny边缘检测算子的效果,分别用Prewitt 、Robert 、Sobel、传统的Canny算子对井下图像进行边缘检测实验,结果表明,该方法在最大程度抑制噪声的同时,能检测到更多的低强度边缘,为井下煤矿探测机器人图像辨识奠定了基础。
Canny算子;Otsu算法;高斯拉普拉斯变换
1 引言
随着煤矿信息化程度的不断提高,煤矿企业大都采用工业视频监控、视频识别的方法来提高生产的安全性与高效性,比如皮带监控、井下救援机器人视觉系统等等,无论哪种应用场合都需要对井下获得的图像进行进一步处理,在这些处理过程中提取物体的轮廓是进行物体识别的一个重要步骤。Canny边缘检测算子是边缘检测算子中最常用的一种,也是公认的性能最优良的边缘检测算子。但是,煤矿井下光线差、照度低、粉尘又多,获得的图像质量很差,检测出的伪边缘比较多,断裂的部分也比较多。为了克服这些缺点,本文从三个方面对传统的Canny算子进行改进。
2 传统的Canny算子
Canny边缘检测算子是Canny J F于1986 年提出的一个多级边缘检测算法。更为重要的是,Canny J F创立了边缘检测计算理论来解释这项技术如何工作。他研究了最优边缘检测方法所需的特性,给出了评价边缘检测性能优劣的三个指标:(1)最优检测:算法能够尽可能多地标识出图像中的实际边缘,漏检真实边缘的概率和误检非边缘的概率都尽可能小;(2)最优定位准则:检测到的边缘点的位置距离实际边缘点的位置最近,或者是由于噪声影响引起检测出的边缘偏离物体的真实边缘的程度最小;(3)检测点与边缘点一一对应:算子检测的边缘点与实际边缘点应该是一一对应的[1]。
Canny算子的步骤如下:
(1)去噪声。
图像与高斯平滑滤波器卷积为:
(1)
令g(x,y)为平滑后的图像,用h(x,y,σ)对图像f(x,y)进行平滑可表示为:
g(x,y)=h(x,y,σ)*f(x,y)
(2)
其中*代表卷积。
(2)用一阶偏导有限差分计算梯度幅值和方向。
已知平滑后的图像为g(x,y),点(x,y)在水平方向与垂直方向的偏导数分别为Gx和Gy,可以使用一阶有限差分近似式来计算梯度幅值和梯度方向,即:
Gx=[f(x+ 1,y)-f(x,y)+
f(x+ 1,y+ 1)-f(x,y+ 1)]/2
(3)
Gy=[f(x,y+ 1)-f(x,y)+
f(x+ 1,y+ 1)-f(x+ 1,y)]/2
(4)
图1为像素点(x,y)在2×2邻域内的差分示意图,与(x,y)相邻的三个点分别为:(x,y+1)、(x+1,y+1)和(x+1,y),在这个2×2的正方形分别求水平方向和垂直方向有限差分的均值,从而获得x和y的偏导数梯度。
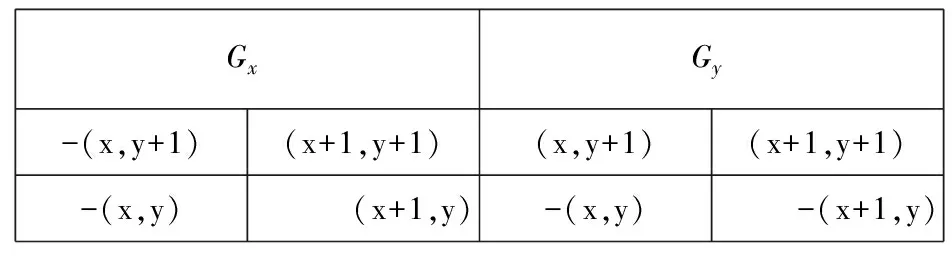
GxGy-(x,y+1)(x+1,y+1)(x,y+1)(x+1,y+1)-(x,y)(x+1,y)-(x,y)-(x+1,y)
Figure 1 Differential diagram
图1 差分示图
幅值和方位角可用直角坐标的坐标转化公式来计算:

(5)
θ[x,y]=arctan(Gx(x,y)/Gy(x,y))
(6)
M[x,y]反映了图像的边缘强度,θ[x,y]反映了边缘的方向。使得M[x,y]取得局部最大值的方向角θ[x,y],就反映了边缘的方向。
(3)对梯度幅值进行非极大值抑制。

Figure 2 Schematic diagram of 0°~360° directions图2 0°~360°方向示意图
将图2所示的0°~360°梯度方向角归并为四个方向θ′:0°,45°,90°,rh。对于所有边缘,令180°=0°,225°=45°,等等。这样,方向角在[-22.5°~22.5°]和[-157.5°~202.5°]范围内的角都被归并为0°方向角,其他的角度归并以此类推,如图3所示。
沿幅角方向检测模值的极大值,即边缘点,遍历八个方向图像像素,将每个像素偏导值与相邻像素的模值比较,取其最大值为边缘点,置像素灰度值为1。
(4)用双阈值算法检测和连接边缘。
Canny 算子采用双阈值法从候选边缘点中检测和连接出最终的边缘。双阈值法首先选取高阈值Thigh和低阈值Tlow, 然后开始扫描图像对候选边缘图像f(x,y)中标记为候选边缘点的任一像素点(i,j) 进行检测, 若点(i,j)梯度幅值M(x,y) 高于高阈值Thigh, 则认为该点一定是边缘点;若点(i,j)梯度幅值M(x,y)低于低阈值Tlow, 则认为该点一定不是边缘点;而对于梯度幅值处于两个阈值之间的像素点, 则将其看作疑似边缘点, 再进一步依据边缘的连通性对其进行判断。若该像素点的邻接像素中有边缘点, 则认为该点也为边缘点;否则, 认为该点为非边缘[2,3]。
3 改进的Canny算子
3.1 四阶非线性偏微分方程图像去噪
传统的图像降噪方法在滤除噪声的同时会使图像模糊,现有的大多数方法采用高度非线性的策略保持图像边缘。虽然这些方法取得了一定的成功,但这种高度非线性在降噪的同时也导致了阶梯效应。尤其是在矿井低照度的情况下,这种问题更加严重,图像阶梯效应使处理结果包含大量分段常量的区域和虚假的边缘,从而在后续的边缘提取中产生很大的困难。为了解决分段常数这一缺陷,人们提出了很多改进的方法,其中基于四阶非线性偏微分方程的去噪方法是比较好的方法之一,它具有以下优点:(1)理论上保证了不产生阶梯效应;(2)推广了原有低阶偏微分方程降噪方法[4,5]。
泛函:

(7)
其中,λ>0为正则化参数,u0为噪声图像,u为降噪图像,
(8)
由变分原理可得欧拉-拉格朗日方程如下:
(uxx/|D2u|)xx+(uyy/|D2u|)yy+
λ(u-u0)+β(Δu-G*u0)=0
(9)
采用最速下降法,极小化泛函E(u)可得如下方程:
ut=-(uxx/|D2u|)xx-(uyy/|D2u|)yy-
λ(u-u0)+β(Δu-Gσ*Δu0)=0
(10)
这里采用有限差分的数值求解算法:
(11)
(12)
(13)
(14)
(15)
按照以上算法对图像进行了大量的计算机仿真实验,采用峰值信噪比PSNR(Peak Signal to Noise Ratio)作为去噪性能的客观评价尺度,定义如下:
PSNR=10lg(M·N/MSE)
(16)

(17)

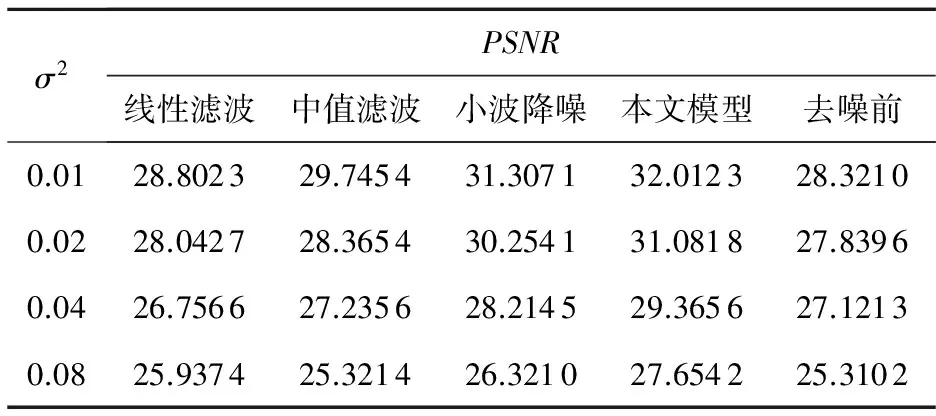
Table1 PSNR value comparison of different denoising methods
3.2 采用自动获取阈值的方法对图像边缘进行检测
传统的Canny算子高、低阈值参数需要人为设定,不能根据图像自身特征自适应地确定。针对该缺陷,本文采用一种自动获取阈值的方法:Otsu最大类间方差法[6]。
最大类间方差法是由日本学者大津展之于1979年提出的,是一种自适应的阈值确定方法,又叫大津法,简称Otsu。它是按图像的灰度特性,将图像分成背景和目标两部分。背景和目标之间的类间方差越大,说明构成图像的两部分的差别越大,当部分目标错分为背景或部分背景错分为目标时都会导致两部分差别小。因此,使类间方差最大的分割意味着错分概率最小。
Otsu最大类间方差法原理为:利用阈值将原图像分成前景和背景两个图像。
当取最佳阈值时,背景应该与前景差别最大,关键在于如何选择衡量差别的标准,而在Otsu算法中,这个衡量差别的标准就是最大类间方差[7]。
记t为前景与背景的分割阈值,前景点数占图像比例为w0,平均灰度为q0;背景点数占图像比例为w1,平均灰度为q1。则图像的总平均灰度为:
q=w0×q0×w1×q1
(18)
前景和背景图像的方差为:
g=w0×(q0-q)×(q0-q)+w1×
(q1-q)×(q1-q)=
w0×(q0-q)2+w1(q1-q)2
(19)
当取方差g最大时,即:
gmax=max(w0×(q0-q)2+w1(q1-q)2)
(20)
此时前景和背景差异最大。
Canny 算子中的双梯度门限其实也是一种阈值,在这里我们选取Thigh=t,Tlow=0.4t。通过分析Thigh、Tlow的选择原理及梯度图像的直方图,利用Otsu 算法实现Thigh的选择是可行的[8,9]。
3.3 采用模糊判决的方法对Canny算子提取的边缘断裂部分进行连接
边缘检测算法的最大缺点是容易产生不连续的边界,因而需要进行边缘连接后处理。连接边缘点最简单的方法之一是,分析图像中每个点的一个小邻域(如3×3或5×5)内像素的特点,该点是用边缘检测技术标记了的边缘点。将所有依据事先预定的准则而被认为是相似的点连接起来,形成有共同满足这些准则的像素组成的一条边缘。在这个分析过程中确定边缘像素相似性的三个主要性质是:
(1)梯度值满足:
|▽f(x,y)-▽f(x1,y1)|≤T
(21)
其中,T是一个非负门限,T=Thigh。
(2)梯度方向满足:
|φ(x,y)-φ(x1,y1)| ≤A
(22)
(3)距离:边缘端点(x,y)与其邻域内候选边缘端点(x1,y1)间的距离。
设(x,y)为边缘像素,以(x,y)为中心建立一个3×3的邻域(x+i,y+j)(i=-1,0,1;j= -1,0,1;i与y不同时为0)。根据梯度幅值、梯度方向和与中心像素的距离相近程度来判断像素是否是与(x,y)连接的边缘像素。采用的隶属度函数为:
(23)
其中,a≤x≤b(k≥0为常数)。
用μΔ表示梯度值所对应的值,μφ表示梯度方向所对应的值,μd表示距离所对应的值。给定权值a、b、c,且a+b+c=1(a、b、c均大于0且小于1),则在(x+i,y+j)处的像素属于与(x,y)连接的边缘像素,总的隶属度为:
μ=aμΔ+bμφ+cμd
(24)
在3×3的邻域内,取a=0.6,b=0.3,c=0.1,选隶属度最大的待选边界点作为边界点,当两个待选边界点的隶属度相同时,选中间点[10]。
4 实验结果及分析
为了验证改进Canny边缘检测算子的效果, 分别取Prewitt、Sobel、Robert、原始Canny算子的最佳阈值对“教育部西部矿井开采及灾害防治重点实验室”获得的图像以及两幅井下图像进行边缘检测,结果如图4所示[11]。
由结果可以明显看出,原始Canny算子比Prewitt、Sobel、Robert算子取得的效果好一些。但是,在采用了改进的Canny算子后,不仅有效地保留了原图像的纹理信息, 同时也抑制了虚假边缘的产生,检测准确性得到较大的提高,边缘连接更加完整[12,13]。
5 结束语
本文将传统的Canny 算子从三个方面进行了改进,并应用到井下图像的处理中。针对图像灰度分布不均匀等问题,首先采用四阶偏微分方程对图像去噪,然后在双阈值选取时采用Otsu方法对图像边缘进行检测,最后采用模糊判决理论进行边缘连接,使得基于Canny算子的检测准确性得到较大的提高, 边缘连接更加完整,伪边界显著减少,取得较好的效果。通过实验说明了改进的Canny算子对井下图像物体轮廓提取比其他算子取得的效果更好。

Figure 4 Comparison of edge extraction experiments图4 边缘提取实验结果对比
[1] Jiang Ai-hua, Xing Ji-shou. Image edge processing technology[J]. Science Technology and Engineering,2005,5(5):299-230.(in Chinese)
[2] Zhang Zheng, Wang Yan-ping. Digital image processing and machine vision[M]. Beijing:People’s Posts and Telecommunications Press, 2010.(in Chinese)
[3] Zhang Chun-xue, Chen Xiu-hong. Noise image edge detection method based on zero crossing[J]. Computer Engineering & Science, 2010,32(9):40-42.(in Chinese)
[4] Szeliski R. Computer vision algorithm and application[M]. Ai Hai-zhou, Xing Jun-liang, Translation. Beijing:Tsinghua University Press, 2012.(in Chinese)
[5] Zhao Cui-fang,Shi Cai-cheng.Gray image compression based on quadtree and partial differential equation[J].Optical Technique, 2007,33(6):848-850.(in Chinese)
[6] Xue Li-xia,Li Tao.Adaptive Canny edge detection algorithm[J].Application Research of Computer, 2010,27(9):3589-3590.(in Chinese)
[7] Tang Lu-lu, Zhang Qi-can. An improved algorithm for Canny edge detection with adaptive threshold[J]. Opto-electronic Engineering, 2011,38(5):128-131.(in Chinese)
[8] Mo Shao-qing, Liu Zheng-guang. An unsupervised threshold selection method for edge detection based on the image self-information[J].Journal of Optoelectronics · Laser, 2011,22(8):1247-1249.(in Chinese)
[9] Liang Guang-ming, Sun Ji-xiang, Ma Qi.An application of Otsu algorithm on Canny operator[J]. Journal of National University of Defense Technology, 2003,25(5):37-40.(in Chinese)
[10] Yang Shao-qing, Jia Chuan-ying.Image edge connect based on fuzzy logic[J].Optical Technique, 2002,28(2):108-109.(in Chinese)
[11] de Jong H. Modeling and simulation of genetic regulatory systems:A literature review[J]. Computtational, 2002, 9(1):67-103.
[12] Destrempes F, Mignotte M. Astatistical model for contours in images[J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 2004, 26(5):626-638.
[13] Bao P, Zhang L. Canny edge detection enhancement by scale multiplication[J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 2005, 27(9):1485- 1490.
附中文参考文献:
[1] 蒋爱花,邢济收.图像边缘处理技术[J].科学技术与工程,2005,5(5):299-230.
[2] 张铮,王艳平.数字图像处理与机器视觉[M].北京:人民邮电出版社,2010.
[3] 张春雪,陈秀宏.基于零交叉的噪声图像边缘检测[J].计算机工程与科学,2010,32(9):40-42.
[4] Szeliski R. 计算机视觉算法与应用[M].艾海舟,兴军亮,译.北京:清华大学出版社,2012.
[5] 赵翠芳,史彩成.基于四叉树和偏微分方程的灰度图像压缩[J].光学技术,2007,33(6):848-850.
[6] 薛丽霞,李涛.一种自适应的 Canny 边缘检测算法[J].计算机应用研究,2010,27(9):3589-3590.
[7] 唐路路,张启灿.一种自适应阈值的Canny边缘检测算法[J].光电工程,2011,38(5):128-131.
[8] 磨少清,刘正光.基于图像自身信息的图像边缘检测阈值自动设定方法[J].光电子·激光,2011,22(8):1247-1249.
[9] 梁光明,孙即祥,马琦.Otsu算法在Canny算子中的应用[J].国防科技大学学报,2003,25(5):37-40.
[10] 杨绍清,贾传荧.基于模糊判决的图像边缘连接[J].光学技术,2002,28(2):108-109.
SHANG Chang-chun,born in 1977,PhD candidate, senior engineer, his research interest includes machine vision system.

马宏伟(1957-),男,陕西兴平人,博士,教授,研究方向为超声无损检测与评价,机电一体化系统与工业机器人等。E-mail:mahw@xust.edu.cn
MA Hong-wei,born in 1957,PhD,professor,his research interests include ultrasonic nondestructive testing and evaluation, mechanical and electrical integration system, and industrial robots.

安静宇(1979-),女,山西忻州人,博士生,工程师,研究方向为机器人视觉系统。E-mail:nail997@126.com
AN Jing-yu,born in 1979,PhD candidate,engineer,her research interest includes machine vision system.
Image edge detection method of underground objects based on improved Canny operator
SHANG Chang-chun,MA Hong-wei,AN Jing-yu
(Engineering Training Center,Xi’an University of Science and Technology,Xi’an 710054,China)
In view of the shortage of the traditional Canny algorithm in detecting the low intensity edge capacity, the improved edge detection method is carried out from the following three aspects: (1) Using a new four-order partial differential equations of the noise reduction algorithm for image denoising, it can further improve the noise reduction effect and better preserve image details in the noise reduction process, so that the underground objects are more easily detected. (2) Using an adaptive threshold method for the image edge detection, the method realizes the adaptive dual threshold extraction, which can effectively extract the real edge. Especially in the edge extraction of low contrast image, this method has more advantages. (3) Using the theory of fuzzy decision, an effective edge connection method is proposed based on the traditional Canny algorithm. Finally, in order to verify the effect of Canny edge detection operator, Prewitt, Robert, Sobel, and traditional Canny algorithms are used to perform the underground image edge detection test. The results show that the new method can detect more low-intensity edge and inhibit the noise at the greatest degree. It gives the foundation for the robot image recognition in coal mine.
canny operator;Otsu algorithm;Gauss Laplasse transform
2013-01-07;
2013-05-21
国家自然科学基金资助项目(50674075)
1007-130X(2014)03-0491-06
TP391.41
A
10.3969/j.issn.1007-130X.2014.03.020

尚长春(1977-),男,河南开封人,博士生,高级工程师,研究方向为机器人视觉系统。E-mail:scc@xust.edu.cn
通信地址:710054 陕西省西安市西安科技大学工程训练中心
Address:Engineering Training Center,Xi’an University of Science and Technology,Xi’an 710054,Shaanxi,P.R.China
猜你喜欢
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年2期)2021-06-09
应用数学(2020年2期)2020-06-24
应用数学(2020年2期)2020-06-24
数学年刊A辑(中文版)(2018年2期)2019-01-08
数学年刊A辑(中文版)(2018年2期)2019-01-08
电子制作(2017年7期)2017-06-05
数学物理学报(2016年3期)2016-12-01
电测与仪表(2016年15期)2016-04-12
电源技术(2015年5期)2015-08-22