雷达信号处理系统仿真设计
2014-09-14 06:22:30毕明雪
沈阳理工大学学报 2014年2期
张 奎,毕明雪
(沈阳理工大学 装备工程学院,辽宁 沈阳 110159)
严重电子干扰和强环境背景噪声条件下,如何从被污染的雷达回波信号中提取并处理目标信号具有重要意义。目前常用的雷达信号处理算法有DP(Dynamic Programming)法和PF(Particle Filter)法等[1-4]。相比PF法,DP法对雷达信号检测的信噪比要求更低,但数次搜索累加的DP法对雷达信号的信噪比提高有限,对强噪声的免疫效果不理想[5],且累加过程降低了该算法的实时性。因此,本文提出一种基于Lyapunov指数的雷达信号处理算法,建立相应的Duffing仿真模型,通过预处理得出模型阈值,保证强噪声背景下更好的对微弱雷达信号进行提取和处理。
1 雷达信号处理仿真系统设计
建立雷达信号处理系统的Duffing模型[5]。
(1)

(2)
(3)
令Y(t)=Q(t)R(t)[6],则

(4)
(5)
由式(1)~(5)可得
(6)
运用代换
(7)
(8)
由式(6)~(8)可得
(9)
雷达信号处理系统的Lyapunov特性指数l1和l2即为
(10)
利用Matlab Simulink软件搭建相应的雷达信号处理模型如图1所示。
2 雷达信号处理模型仿真
仿真参数设计:雷达信号频率为1GHz,正弦信号的角频率为2πGHz,强噪声为加性高斯白噪声。仿真软件为Matlab软件。
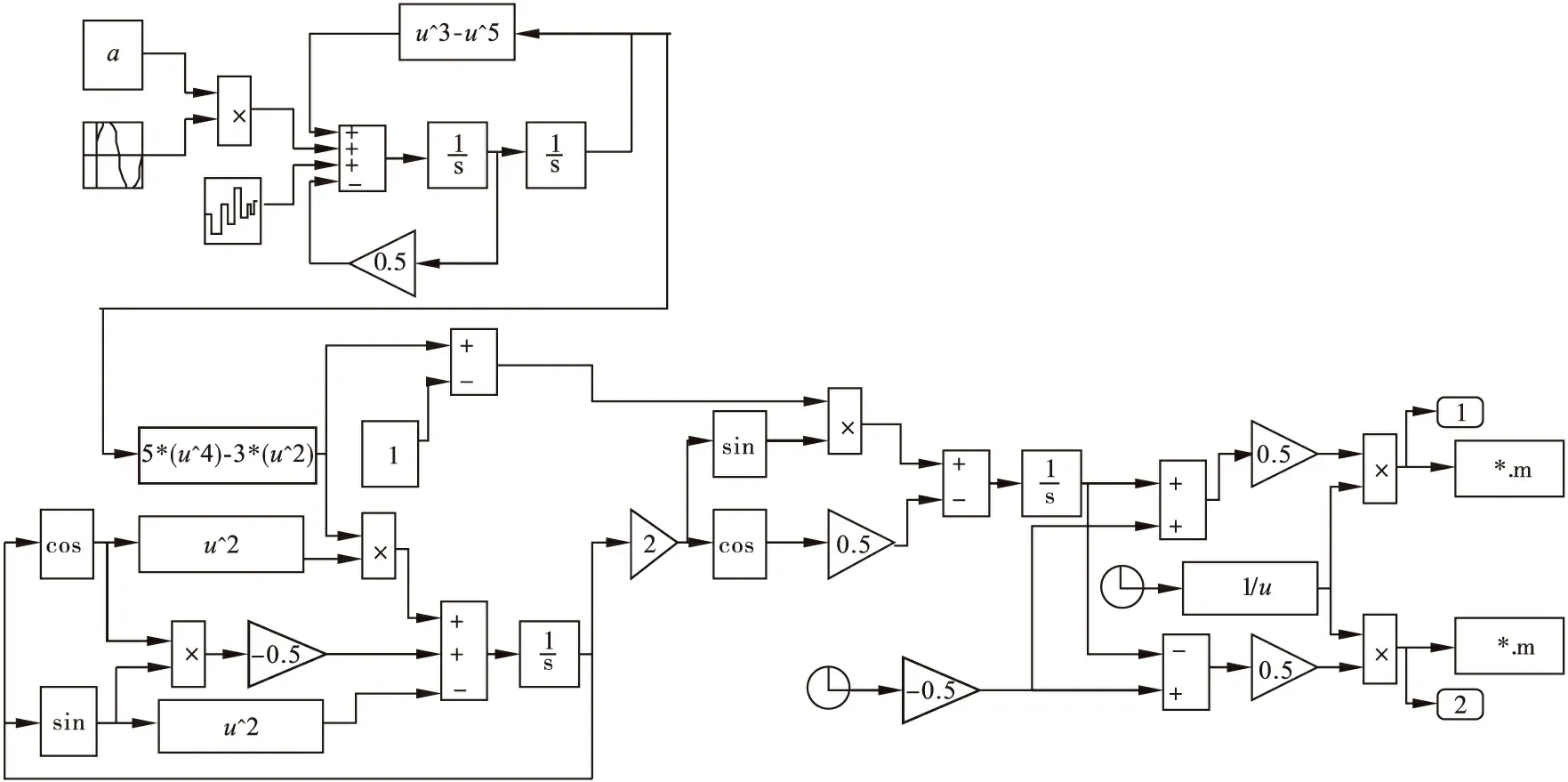
图1 雷达信号处理模型
2.1 阈值求解
首先需要对该模型由混沌态跃变为周期态的阈值进行求解。无噪声背景下,参数γ与Lyapunov指数的仿真曲线如图2所示。图2中,当最大Lyapunov指数大于零时,系统处于混沌状态,仅当上下两个Lyapunov指数均小于零(γ≥0.08237639)时,系统初次进入周期态,可确定系统由混沌态进入周期态的阈值γd=0.08237639。由于Duffing模型对γ值极为敏感,γ>0.16854134时,系统将处于周期态和混沌态的交替变化。由图2可以看出,该算法能够检测的雷达信号幅值范围应小于0.08616495。

图2 参数γ与Lyapunov指数的关系曲线
2.2 噪声背景下模型仿真
强噪声背景下,调节γ值等于γd,噪声功率范围为10-8W到1W,系统Lyapunov指数与噪声功率间的仿真结果如表1所示。由表1可以看出,当高斯白噪声功率P≤10-3W时,系统最大Lyapunov特性指数值均大于零,系统处于混沌状态。当噪声功率很大时,系统处于一种不稳定状态,但不会完全脱离混沌进入周期状态。因此,本文设计的雷达信号处理系统对一定功率范围内的白噪声是免疫的。

表1 Lyapunov指数与噪声功率的仿真结果
加入微弱谐波信号,模型如式(11)所示。

(11)
当幅值a由10-10递增至100时,经仿真得a≥7.6634×10-4时,最大Lyapunov指数为负,系统由混沌态跃变到周期态。此时,Lyapunov指数的演化曲线如图3所示。该系统的最低检测门限为10lg(7.6634×10-4)=-71.7388dB。
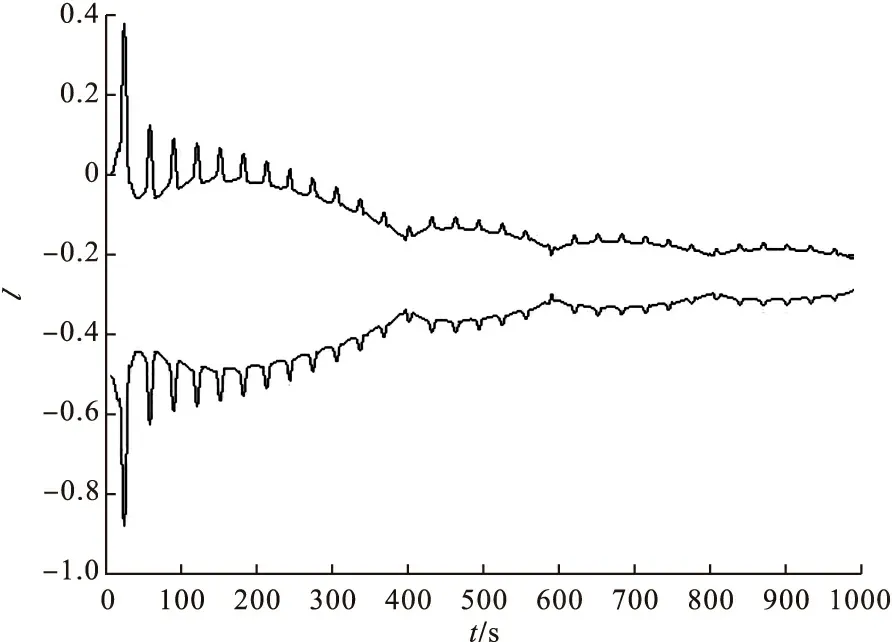
图3 Lyapunov指数的演化曲线
3 雷达回波信号处理仿真
3.1 回波信号频率检测
雷达回波信号处理系统的数学模型如式(12)所示。其中,γ2sin(ω2t)为回波信号中的有用信号,n(t)为回波信号中的噪声。对应的系统框图如图4所示。

(12)
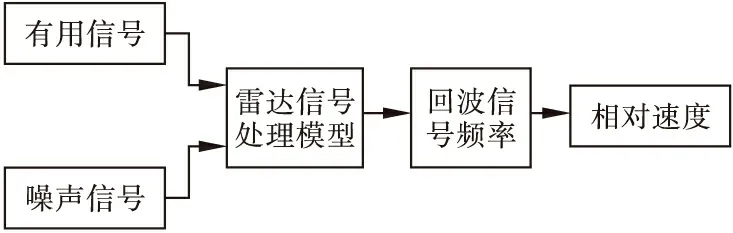
图4 雷达回波信号处理流程图
仿真过程中,首先调节系统模型参数为γd,使其处于临界混沌状态,加入的白噪声功率为10-4W,有用信号频率Fr=1.0000244GHz,ω1初始值为2πGHz。频率在一定范围内变化时,系统阈值基本不变,调节系统ω1值,仿真步长为10rad/s,当系统最大Lyapunov指数跃变为负值时,ω1=ω2=6283338490Hz。
3.2 相对速度求解
有用信号的频率为
Fr=ω1/2π
(13)
雷达信号的多普勒频移为
Fd=Fr-Ft=ω1/2π-Ft
(14)
Ft为发射信号的频率1GHz。则导弹与目标间的相对速度为

(15)
则导弹与目标间相对速度v=365.7m/s。
4 结论
本文提出了一种基于Lyapunov指数的雷达信号处理算法,并建立雷达信号处理的Duffing模型。根据该模型,求解出系统由混沌态跃变为周期态的阈值,进一步提取出回波信号中有用信号的频率,计算出导弹与目标间的相对速度。仿真结果表明,本文所提出的雷达信号处理模型的最低检测门限可达到-70dB以下,适用于强噪声背景下的雷达信号处理。
[1]Dellago C,Posch H A.Lyapunov Instability of the Boundary Driven Chernov Lebowitz Model for Stationary Shear Flow[J].Journal of Statistical Physics,2012,7(3):883-887.
[2]Samuel J D,Mark G R,Brian C A.Comparison of Dynamic Programming for Several Track before Detectal gorithms[J].Journal on Advances in Signal Processing,2010,5(11):1-10.
[3]强勇,焦李成,保铮.一种有效的用于雷达弱目标检测的算法[J].电子学报,2003,3(5):151-155.
[4]Blostein S D,Riehardson H S.A sequential detection approach to target tracking[J].IEEE International Conference on Communications,2011,1(1):59-62.
[5]李月,杨宝俊.混沌振子检测引论[M].北京:电子工业出版社,2004.
[6]张启明.离散Hamilton系统的Lyapunov型不等式及稳定性[D].长沙:中南大学,2012.
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
制造技术与机床(2019年9期)2019-09-10 07:36:54
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
西南交通大学学报(2018年6期)2018-12-18 02:22:28
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
河北遥感(2017年2期)2017-08-07 14:49:00
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27