
基于S7-PLC和M4变频器的绕线机自适应控制
2014-09-12 22:39丁斗章
上海电机学院学报 2014年6期
丁斗章
(上海电机学院 电气学院, 上海 200240)
基于S7-PLC和M4变频器的绕线机自适应控制
丁斗章
(上海电机学院 电气学院, 上海 200240)
研究了一种由可编程控制器(PLC)和M4变频器驱动的绕线机系统。系统在绕制时,线速度保持恒定,角速度自适应绕制半径的调整。给出了系统结构图,设置了变频器的控制参数,描述了自适应控制关系和相应的控制流程;设计了自适应控制程序并下载到PLC中,输出给M4变频器的自适应模拟控制输入由程序完成计算。仿真研究验证了由PLC和M4变频器驱动的绕线机自适应控制方法的有效性。
绕线机; 现代控制器; 自适应控制; 程序设计
PLC绕线机在工业上有广泛的应用。随着技术的发展,绕线机的控制不断改进,文献[1]中描述了OMRON柔性控制器在高速绕线机上的应用。文献[2]中设计了基于ARM处理器和可编程控制器(Programmable Logic Controller, PLC)的绕线机控制系统来满足电动机精确绕制的技术要求。文献[3]中设计了基于PLC的绕线机自动控制系统,使用高速脉冲来控制步进电动机进行绕制。文献[4]中给出了基于交流伺服控制的DSP TMS320LF2407、运动控制芯片JRMCK201和步进驱动的绕线机系统。文献[5]中研究了基于PLC DVP14SS11T2和变频器VFD015M21的绕线机控制,但是未讨论输入至变频器的模拟信号对绕制角速度的控制。文献[6]中讨论了最大基频时分层控制的优化问题。文献[7]中采用电子感应器和单片机来调节阻尼力矩,结合简单的强直结构设计,绕线机可以实现自适应的张力调整。文献[8]中采用了脉冲组合算法来解决特定情况下的绕制同步问题。文献[9]中介绍了高速绕线机的设备监控系统的应用。文献[10]中研究了线性感应电动机考虑主要边缘效应的鲁棒非线性控制;文献[11]中研究了线性电动机在机械弹性情况下的自适应非线性速度控制。文献[12]中采用内、外拉杆同步往复和交错变换漆包线头装夹位置的方法,解决了扼流圈主要依靠人工绕制的问题。文献[13]中研究了细微线空心绕线机,并阐述了复合排线的原理。文献[14]中研制了一种基于矢量变频技术的专用恒张力绕线机,用于超导线圈的绕制。文献[15]中利用S7-200 PLC和触摸屏在普通车床上完成了绕线机的电气系统设计与开发,使绕制质量和精度得以提高。文献[16]中对转子绕线机控制系统进行了数学建模和Simulink仿真,从而确定了调节系统的参数。
本文利用S7-PLC和M4控制器设定绕制的线速度、最大角速度、每层的匝数、绕制的层数、初始绕制半径和绕线的直径等参数,体现了对不同绕制情况的柔性以及由此而来的应用的宽泛性,绕制的角速度自适应于绕制半径的改变,绕制进程更加平滑和稳定,具有更好的绕制质量。
1 绕线机系统结构
绕线机的系统结构如图1所示。由图1可见,该系统由绕制轮及其驱动电动机、M4变频器、核心的PLC控制器、成形支架和相关的步进电动机等组成。
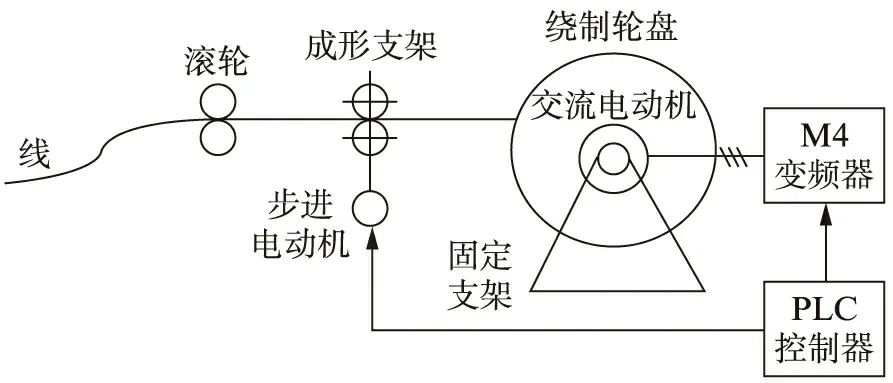
图1 绕线机控制系统结构图Fig.1 Construction scheme of winding machine control system
绕线机运行时由交流电动机驱动绕制轮盘,交流电动机由M4变频器控制。为使绕制过程平稳进行,绕线的线速度需保持恒定,每一层绕线的角速度的变化遵循如下原则:
v=rω
(1)
式中,v为绕线的速度;r为绕制的半径;ω为绕制轮盘的角速度。
步进电动机用于控制成形支架的高度,随着绕制的进行,绕制半径不断增加;为保持线的张力的恒定,成形支架同步升高。绕制的方向由安装在成形支架上的绕线导向器引导,当一层绕制完成、进入下一层时,导向器实现转向,该时间点和成形方向由PLC计算并控制。
2 自适应控制设计
2.1M4变频器的参数选用与设置
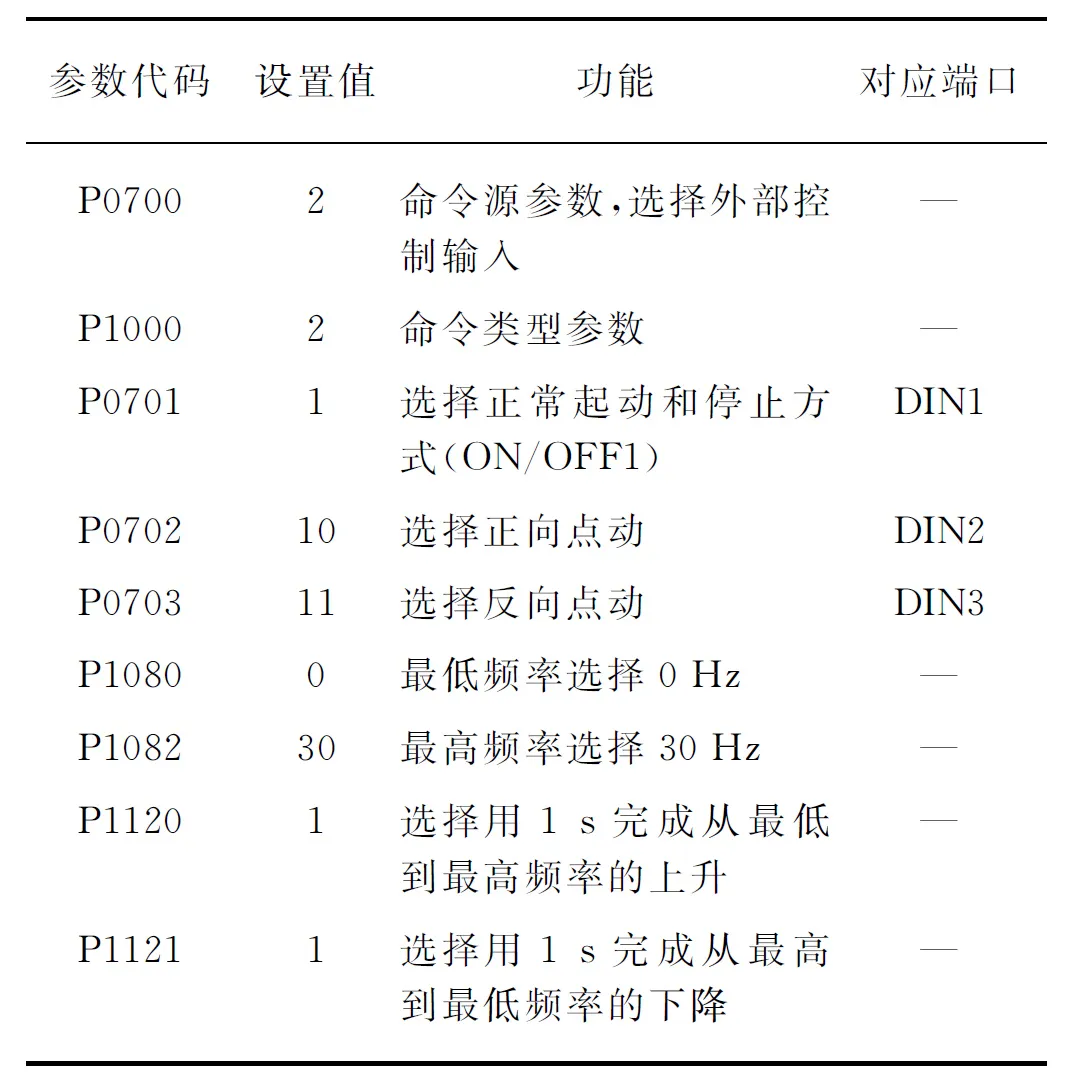
绕线机在运行时,要求线速度保持恒定,故每一层绕线的角速度则必须发生变化。由于驱动绕制轮盘的M4变频器的控制输入是模拟量,故该模拟量在每一层是不同的。本文实现设计控制的M4变频器的参数设定如表1所示。同时,将选用电动机的各额定参数写入M4变频器的P0300~P0314参数中。
2.2基于S7-PLC的自适应控制设计
设绕制进程包括m层,每层有n匝,绕制线的直径为d,绕制轮盘的初始半径为r0。绕制进程如下:
对第1层,r=r0。由于绕线速度v保持恒定,故绕制轮盘的角速度为
ω=ω0=v/r0
当第1层的n匝绕制完成时,成形方向必须改变。一般地,绕制半径为
r=rf+d
(2)
式中,rf为上一层的绕制半径。
表1M4变频器参数的设置
Tab.1 Parameter settings of M4 inverter
则下一层的绕制半径为
r=r0+d
根据式(1),则其角速度较第1层有所下降。
随着绕制半径的增加,每一层的绕制时间t也自适应地发生变化,为
t=2πr·n/v
(3)
在绕制进程中,绕制半径的调整发生于绕制的换层时刻,这是自适应控制的条件。当该自适应控制条件发生时,自适应控制函数,即绕制每一层的定时器定时值和PLC输出给M4变频器的模拟量必须在同一时刻进行更新。当新的绕制半径确定后,时间值进行更新,表明自适应控制条件的发生基于时间的预测。图2给出了绕制进程流程图。
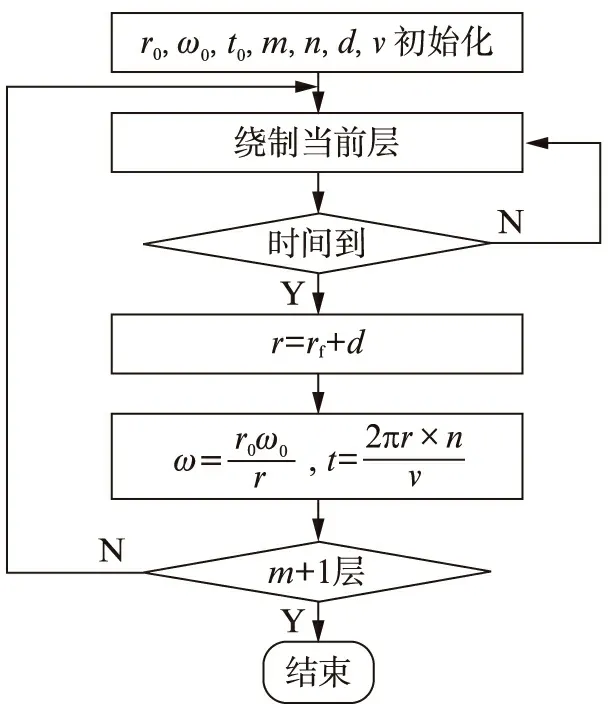
图2 绕制进程的流程图Fig.2 Flow diagram of winding progress
S7-PLC模拟量模块和M4变频器参数之间存在一定的关系,如PLC模拟量模块的最大数值必须与通常设置在M4变频器参数P1082和PLC拨码开关选择的最大模拟电压相对应;计算出的PLC模拟量模块的输出电压即为M4变频器的输入电压,该控制输入决定了M4变频器的输出频率和电动机的旋转速度。M4变频器的各实际工作频率值与最大频率值之间符合线性关系。
PLC的模拟输出量ω通过PLC作为自适应控制器计算得到,即
ω=r0ω0/r
(4)
计算结果ω与r成反比,ω值决定了PLC模拟量模块的数字值以及模拟输出量。
当一层绕制结束时,PLC控制绕制电动机自适应地随绕制半径的变化而调整绕制的角速度,同时,控制成形支架的步进电动机实现步进运动,使成形支架与绕制电动机之间的绕线保持恒定的张力,获得较好的绕制效果。
3 PLC程序设计
在实验室中,使用S7-300 PLC进行程序设计和调试。CPU为314C-2 DP,具有数字输入和输出、模拟输入和输出功能。本文设定绕线机参数如下:m=200,n=300,d=1mm,r0=50mm,fmax=30Hz。
3.1绕制半径的增加
图3给出了绕制半径增加的PLC程序。根据绕制进程,每绕制一层,即当每一层定时器的时间达到设定值时,M1.1闭合。MD2存储的数据为rf,MD42存储的数据为绕线直径d,而MD46存储的数据为当前绕制半径。同时,MD46存储的内容(当前绕制半径)由MOVE指令传输给MD2,为绕制下一层做好准备。
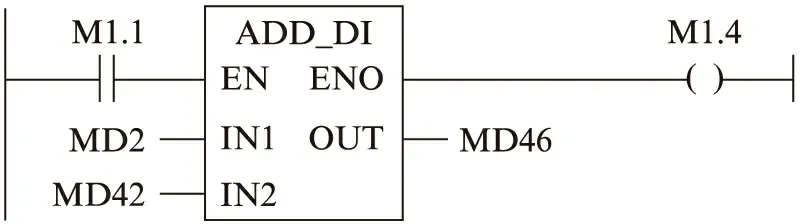
图3 绕制半径增加的PLC程序Fig.3 PLC network of winding radius addition
3.2定时器的自适应
在绕制过程中,每一层的绕制时间是自适应变化的,由定时器控制。图4给出了定时器设定值的计算程序。图中,M0.5存储的是上一步的输出,MD18存储的数据为2π·n=600π,故MD18存储的内容乘以MD2存储的内容等于当前层绕线的长度,存储在MD26中;MD22存储的内容为绕线速度v=r0ω0=3000π。由此,MD30存储的内容等于该层的绕制时间,且该时间传输给通电延时接通定时器T1的TV端。每一层的绕制时间随着绕制半径的增加而改变。
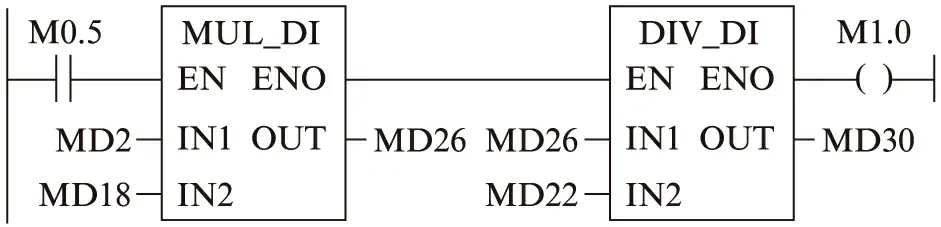
图4 定时器设定值的PLC计算程序Fig.4 PLC network of computation of timer setting value
3.3自适应模拟量输出
PLC的模拟量输出是M4变频器的控制输入,来控制绕制轮盘的角速度。图5给出了绕制角速度模拟量输出计算程序。图中,M0.1为程序开始工作时的启动信号;PLC的最大数字量“27648”对应最大模拟输出,即MD74中存储的数据ω0=60π;该两数的比率存储在MD34中。MD14存储的数据为当前角速度ω,该值等于MD2存储的内容除以MD22存储的内容;MD34存储的内容乘以MD14存储的内容成为模拟输出的对应数字量,存放在MD38中,最后该对应值传送至模拟输出地址PQW752。

图5 绕制角速度的模拟量输出计算PLC程序Fig.5 PLC network of computation of analog output of the winding angular velocity
3.4控制程序仿真
将整个控制程序下载至PLC进行仿真研究实验。图6给出了绕制角速度的模拟量输出计算的仿真运行图。程序在运行时,表示能量流的各线条和方框呈现绿色(见图中虚线方框部分),表明所设计的程序运行正常,说明了控制程序的合理、有效性。
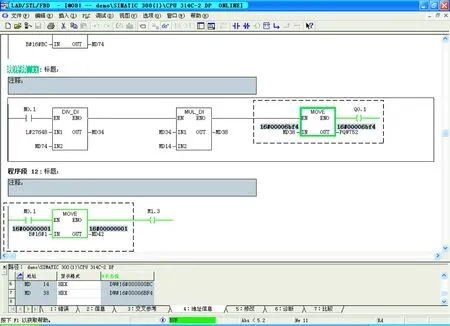
图6 控制程序仿真Fig.6 Simulation of the control program
4 结 语
针对绕线机的控制,本文研究了一种基于可编程控制器PLC和M4变频器驱动的控制系统。该系统保持绕线的线速度不变,每一层的绕制角速度不变;换层时,绕制的半径发生改变,角速度自适应于绕制半径的调整,输出给M4变频器的自适应模拟控制输入,由程序完成计算调整以控制角速度,同时,一层的绕制时间也随之调整。依据系统的结构图和自适应控制的流程要求,设置了变频器的控制参数,设计了自适应控制程序并下载至S7-300 PLC进行仿真调试,验证了基于PLC和M4变频器驱动的绕线机的自适应控制方法是可行的。
[1] 赵利军,杨世方.OMRON柔性运动控制器FQM1在高速绕线机中应用的探讨[J].变压器,2009,46(6): 30-34.
[2] 陈豪杰,李晓潮.基于ARM和PLC的新型绕线机控制系统设计[J].机电产品开发与创新,2009,22(5): 134-136.
[3] 刘晓强.基于PLC的绕线打把机自动控制系统设计[J].机械工程与自动化,2010(2): 168-170,172.
[4] 刘洪玮,郭吉丰,孙云云,等.两轴伺服控制的绕线机系统[J].电气传动,2010,40(9): 9-12.
[5] 林锦实.基于PLC的绕线机自动控制系统[J].机电工程技术,2009,38(4): 48-50,125.
[6] Apalak M K,Yildirim M,Ekici R.Layer optimization for maximum fundamental frequency of laminated composite plates for different edge conditions[J].Composites Science and Technology,2008,68(2): 537-550.
[7] 熊劲松.自适应式绕线机的设计与实现[J].机械研究与应用,2010(3): 133-134,138.
[8] 周广峰,刘炜.线圈绕制过程中同步问题的解决算法[J].电子技术,2011,38(7): 58-59.
[9] 曹严严,刘昊扬.设备监控系统在高速绕线机机床中的应用[J].仪器仪表与分析监测,2012(1): 6-8.
[10] Soltani J,Abbasian M A.Robust nonlinear control of linear induction motor taking into account the primary end-effects[J].IEEE Proceedings of IPEMC,2006: 1-6.
[11] Hirvonen M,Pyrhonen O,Handroos H.Adaptive nonlinear velocity controller for a flexible mechanism of a linear motor[J].Mechatronics,2006,16(5): 279-290.
[12] 陶宇红,黄宇航.一种扼流圈绕线机的设计[J].机电技术,2012(8): 94-96.
[13] 王敏,杨兆建,张建军.细微线空心绕线机的研究[J].电子工业专用设备,2009(6): 44-46.
[14] 王晓磊,许皆平,崔健.一种基于矢量变频技术的超导线圈专用恒张力绕线机[J].超导技术,2010,38(4): 25-29.
[15] 沈勇.CM6150绕线机的设计与应用[J].林业机械与木工设备,2012,40(6): 33-35.
[16] 季丽丽,马骥.基于MATLAB转子绕线机控制系统调节器的仿真研究[J].沈阳大学学报: 自然科学版,2012,24(1): 25-27.

DINGDouzhang
(School of Electrical Engineering, Shanghai Dianji University, Shanghai 200240, China)
Construction of a winding machine system with a programmable controller and an inverter is introduced. The line velocity keeps constant while winding, and the angular velocity adapts to the increase of winding radius. The system construction scheme is proposed. Control parameters of inverter are set up. Adaptive control relation is explained and the corresponding program flow diagram presented. The adaptive control program is designed, and the program downloaded from computer to the programmable controller. Adaptive analog control input to the inverter is computed by the program. Simulation shows that the adaptive control of the winding machine is workable.
winding machine; modern controller; adaptive control; program design
2014 - 09 - 24
上海市教育委员会重点学科资助(J51901)
丁斗章(1963-),男,教授,博士,主要研究方向为控制理论与控制工程,E-mail: dingdz@sdju.edu.cn
2095 - 0020(2014)06 -0329 - 05
TP 273
A
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
防爆电机(2020年6期)2020-12-14
制造技术与机床(2019年11期)2019-12-04
测控技术(2018年12期)2018-11-25
电子制作(2017年20期)2017-04-26
电子制作(2016年21期)2016-05-17
自动化学报(2016年8期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
