
利用霍尔元件测量金属丝的弹性模量
2014-09-12 12:01:58吴高米支辛蕾邓金祥原安娟王丽香
物理实验 2014年6期
吴高米,崔 敏,王 闯,支辛蕾,万 欣, 邓金祥,张 兵,原安娟,王丽香
(北京工业大学 应用数理学院,北京 100124)
1 引 言
弹性模量是描述固体材料抗形变能力的重要物理量,是工程技术中常用的参量[1]. 用静态法测量物体弹性模量的主要难度在于物体微小位移的测量. 传统大学物理实验教学中采用光杠杆放大法[2]进行微小位移的测量,另外,还可以利用霍尔元件来测量微小位移. 当霍尔元件[3]置于均匀梯度磁场时,由于霍尔效应,霍尔元件位置的变化将引起霍尔元件两端霍尔电压的改变,且电压与位置是一一对应关系,在特定范围内,具有良好的线性关系[4]. 本文将现有弹性模量实验仪器进行组合改装,将霍尔元件与金属丝拉伸端同步,在其周围设置均匀梯度磁场,金属丝的微小伸长量通过测量霍尔元件位置变化获得,实现了金属丝弹性模量的创新测量.
2 实验原理
设粗细均匀的金属丝的长度为L0,截面积为S,将其上端固定,下端悬挂质量为m的砝码,若金属丝受外力F的作用伸长了ΔL. 由胡克定律知,在弹性限度内,应力F/S和应变δL/L成正比[5],即
(1)
其中,E为金属丝材料的弹性模量,其数值仅与材料性质有关,而与材料实际尺寸及外力无关. 若金属丝直径为d,则
(2)
式中,各量均为SI单位时,E的单位为Pa. 对长约65.00 cm、直径为0.8 mm的钢丝,当用1.000 kg砝码(9.8 N)竖直加力时,钢丝伸长量δL约为0.065 mm. 因此,微小伸长量的测量显得尤为重要.
霍尔元件具有结构简单、体积小、动态特性好和寿命长的优点,它不仅用于磁感应强度和电参量测量,也可进行微小位移的测量. 当霍尔元件置于磁场B中,元件内部通入激励电流I时,霍尔元件两端可产生霍尔电压UH[6]:
UH=KHIB,
(3)
其中,KH为霍尔元件灵敏度(常量),在激励电流不变时,霍尔电压与磁场成正比.
当霍尔元件处在均匀梯度磁场中垂直于磁场方向(即实验中的竖直方向)发生微小位移时,所处磁场也发生变化,而这种变化可由霍尔电压UH显示出来. 并且,由于霍尔元件在平行于磁场方向(即实验中的水平方向)运动时磁感应强度是不变的,不会引起霍尔电压的改变,也就是说输出的霍尔电压的改变量仅由霍尔元件的竖直位移引起,因此可利用霍尔元件来测量微小位移.
3 实 验
3.1 霍尔元件位移传感定标
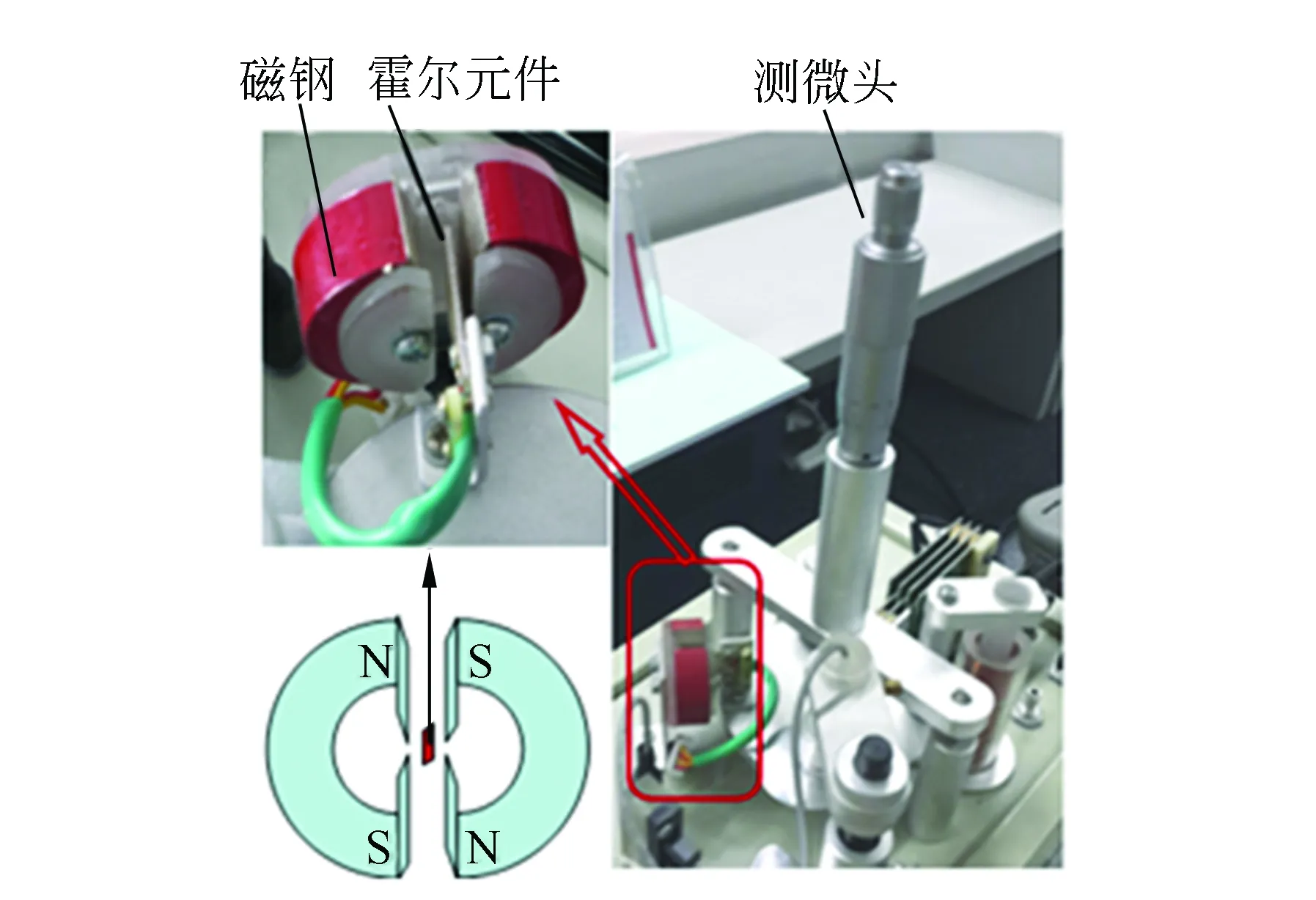
霍尔元件位移传感特性测试如图1(a)所示. 半导体霍尔元件(3.0 mm×2.5 mm×0.8 mm)置于2个半环形永久磁钢形成的梯度磁场中,霍尔元件通以恒定电流(精度为0.1 A). 霍尔元件通过螺旋测微头的调节在梯度磁场中上下移动,输出的霍尔电压取决于其在磁场中的位置,霍尔电压通过电压测试仪读出,霍尔元件位移量通过螺旋测微头读出.
调节霍尔元件承载装置的上下位置,使霍尔元件位于梯度磁场中间位置,此时磁场为零,霍尔电压也为零. 上下移动测微头,每变化0.05 mm读取相应的霍尔电压值,得到霍尔电压随位移变化规律如图1(b)所示. 从图中可看出,霍尔电压(精度为0.01 mV)与位移变化具有良好的线性关系,线性拟合得出UH=3.549 22x+0.013 14,灵敏度即线性系数Kx为
(4)
(a)
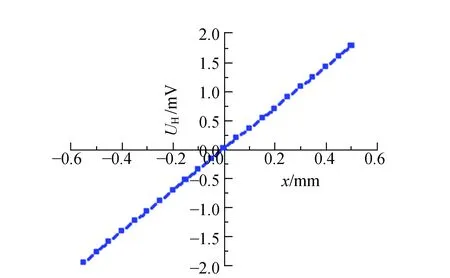
(b)图1 霍尔元件位移传感特性测量装置及霍尔电压随位移变化关系
3.2 实验装置设计
图2 所示为设计的实验装置,将霍尔元件固定到弹性模量测量仪的力学装置上,霍尔元件与金属丝(钢丝)的夹持部分(夹具)固定在一起,使两者能够同步运动. 均匀梯度磁场固定在夹具一侧,使得钢丝未拉伸时霍尔元件位于磁场中心. 钢丝上端固定,下端托盘上增加或减少砝码数量使得钢丝拉伸和还原,霍尔元件的位置会随钢丝拉伸而发生变化,霍尔元件的位移大小即为样品钢丝的伸长量δL.
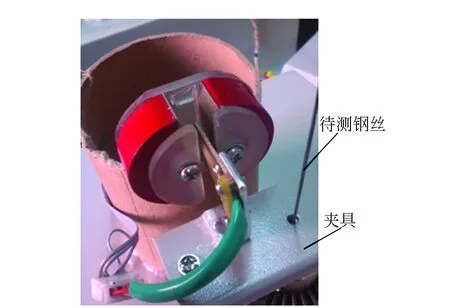
图2 实验装置设计实物图
4 结果分析与讨论
4.1 金属丝几何参量测量

4.2 金属丝外加拉力时测量结果
钢丝竖直放置,在钢丝底部托盘内增减砝码,并记录霍尔元件产生的霍尔电压,测量数据如表1所示. 每增加1.000 kg砝码记录电压示数Ui(i=0,1,…,13),再每减去1.000 kg砝码记录电压示数Ui#(i=0,1,…,13),然后取其平均值作为第i次测量结果,以消除圆柱体和固定平台圆孔间的摩擦对测量结果的影响.

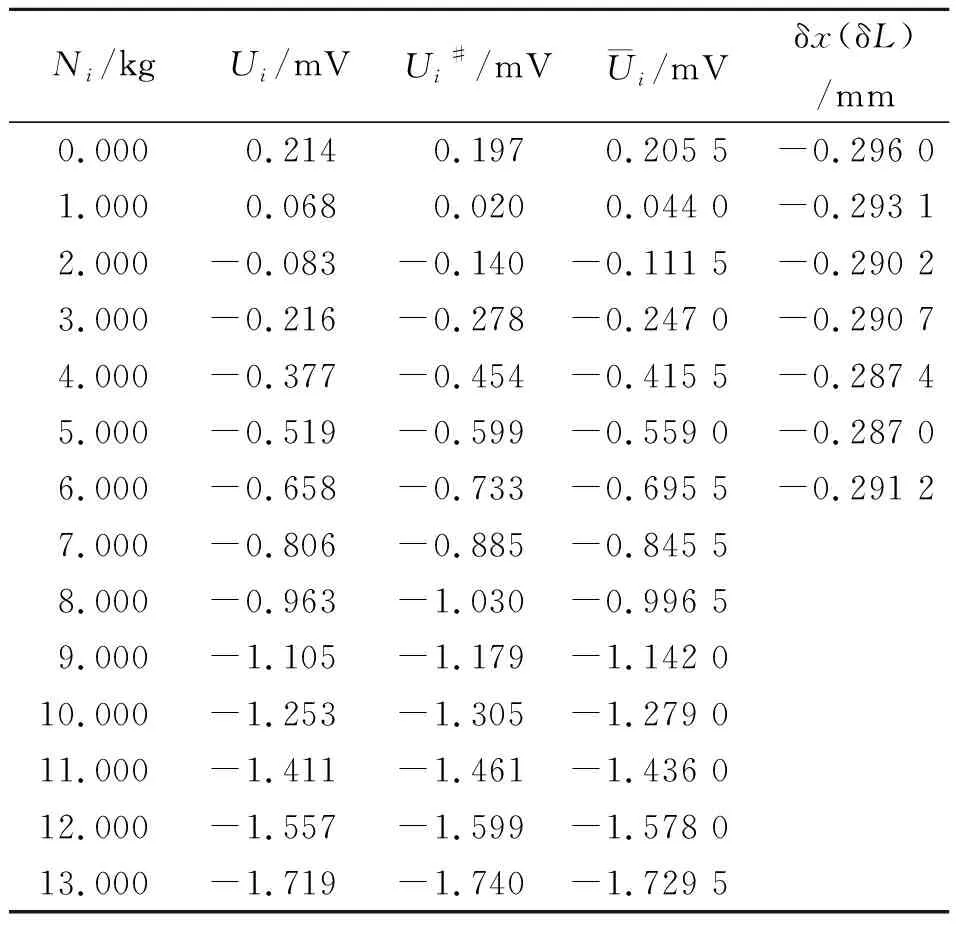
表1 增减砝码时数显电压表示数及对应位移

4.3 金属丝弹性模量的计算

(5)
以ΔUi为纵坐标,Ni为横坐标作图,如图3所示,曲线拟合为良好线性关系,斜率k=0.147 8 mV/kg. 因此,弹性模量E为
(6)
根据弹性模量的不确定度公式为
(7)
其中厂家提供Δm/m=0.6%;米尺测量ΔL0=0.5 cm;钢丝直径多次测量Sd2=1.228×10-4mm2,螺旋测微器误差Δ仪=0.004 mm,得Δd=0.012 mm;由表2得ΔδL=5×10-3mm,因此:

(8)
(9)
则金属丝弹性模量的最终测量结果为
(10)
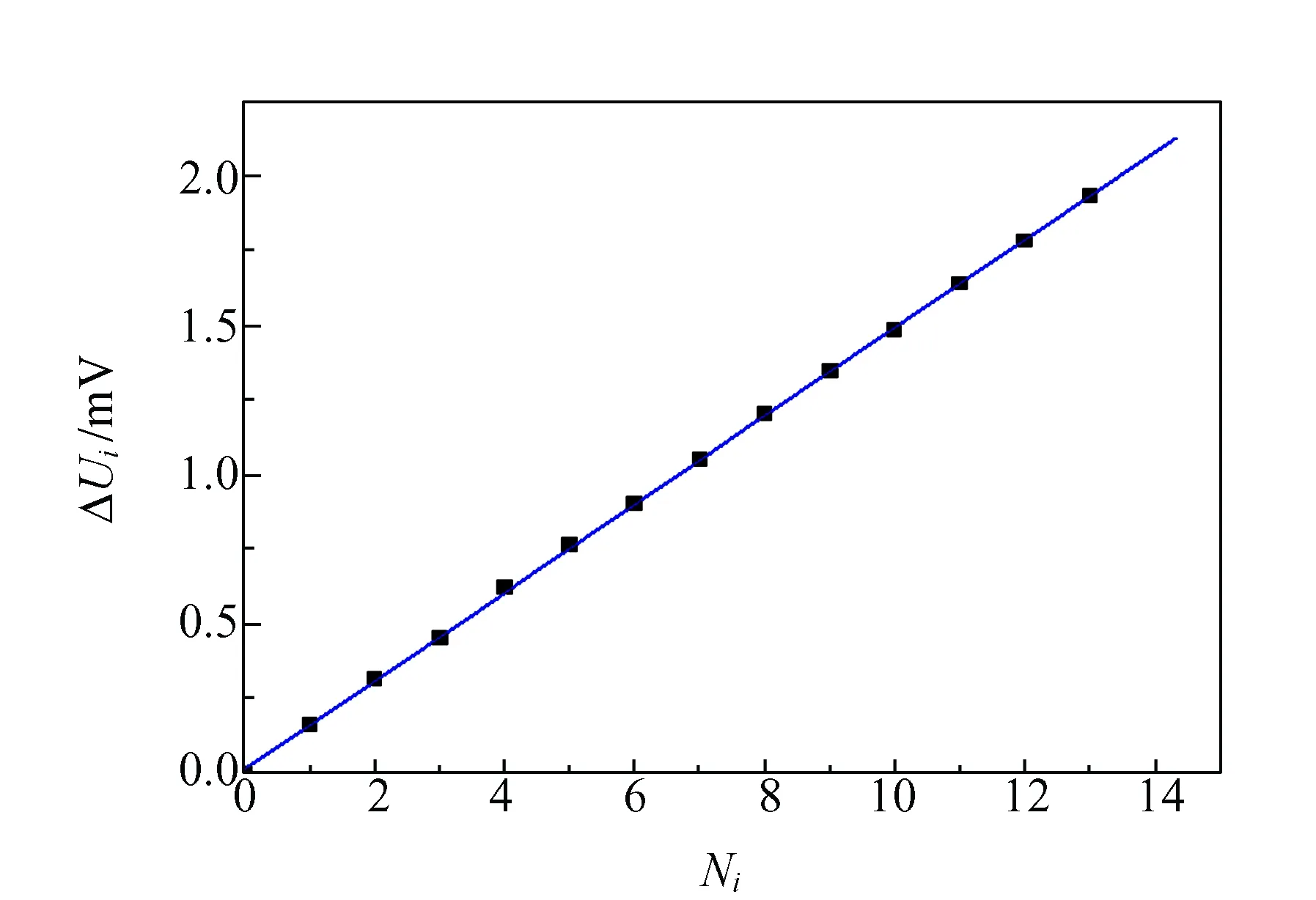
图3 霍尔电压随所加砝码变化曲线图
5 结束语
将霍尔元件应用于拉伸法测量弹性模量的实验中,替代光杠杆放大系统,通过测量霍尔电压得到微小位移. 结果表明,霍尔电压随位移变化为良好线性,采用作图拟合法计算求得金属丝的弹性模量,分析了实验结果的不确定度. 实验证明该测量方法测量精度高,准确性好,通过数字电压表测量霍尔电压巧妙地解决了微小位移难测的问题,提高了实验精度和实验效率;同时充实了大学物理实验教学内容,更可作为创新和研究型实验项目对学生开放.
参考文献:
[1] 邓金祥,刘国庆,原安娟,等. 大学物理实验[M]. 北京:北京工业大学出版社,2011:65-67.
[2] 刘芬芬,傅振国,朱茂健,等. 光杠杆放大法测量的误差分析及改进方法[J]. 大学物理实验,2013,26(4):92-95.
[3] 刘卓霖,杨一帆,陈苏,等. 基于霍尔传感器阵列的孔板流量计测流量实验[J]. 物理实验,2011,31(7):5-7.
[4] 蔡明,章英,白雪莲,等. 线性霍尔传感器技术及其在气动定位控制中的应用[J]. 仪表技术与传感器, 2013(1):13-15.
[5] 李东平,戴玉萍. 测定物体长度微小变化量的实验装置[J]. 物理实验,1996,16(2):72-74.
[6] 刘雪梅. 霍尔效应理论发展过程的研究[J]. 重庆文理学院学报(自然科学版),2011,30(2):41-44.
猜你喜欢
电线电缆(2022年6期)2022-12-23 09:00:42
内江科技(2022年5期)2022-06-07 08:01:22
小天使·四年级语数英综合(2019年10期)2019-11-09 13:35:07
数学小灵通(1-2年级)(2018年6期)2018-06-28 03:15:36
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
太空探索(2015年6期)2015-07-12 12:48:42
数学大王·中高年级(2015年6期)2015-06-26 02:57:20
固体火箭技术(2015年1期)2015-04-25 01:03:03
创业家(2015年2期)2015-02-27 07:52:33
儿童故事画报·智力大王(2013年6期)2013-04-29 00:44:03
