基于改进的LS-SVM的船舶汽轮机预测函数控制
2014-09-08 00:35夏英华
黑龙江工程学院学报 2014年6期
刘 超,夏英华,张 妤
(1.东北轻合金有限责任公司,黑龙江 哈尔滨 150060;2.东北林业大学 机电工程学院,黑龙江 哈尔滨 150040)
基于改进的LS-SVM的船舶汽轮机预测函数控制
刘 超1,夏英华1,张 妤2
(1.东北轻合金有限责任公司,黑龙江 哈尔滨 150060;2.东北林业大学 机电工程学院,黑龙江 哈尔滨 150040)
船舶动力系统是船舶安全运行的关键,是船舶能够完成其航行任务的保证。随着各类船舶在机组容量上的迅速增加,性能显著改善,人们对汽轮机的控制提出更高的要求。针对船舶汽轮机自身的特点,提出一种改进的基于在线LS-SVM的预测函数控制器的设计方法,用LS-SVM建立在线预测模型,解决汽轮机模型存在的非线性、变参数、模型难以描述等特点。MATLAB仿真结果表明,此控制器能有效地对船舶汽轮机系统进行控制,实现船舶动力系统的智能控制。
船舶汽轮机;预测函数;LS-SVM;非线性控制;辨识
船舶动力装置是船舶能够完成航行任务的关键设备,其中汽轮机是船舶动力装置的“心脏”,由于船舶工作环境的特殊性,船舶汽轮机与电厂汽轮机的工作特点有很多不同,这样就对控制系统提出了更高的要求。首先,船舶汽轮机的模型是非线性的、难以精确描述,并且汽轮机系统模型会随船舶工况、参数、环境等因素的变化而变化[1],因而需要在设计控制器时将模型的变化考虑其中。其次,由于船舶航行在海上,汽轮机的工况经常变化,因而对主汽轮机动性能、快速性的需求很高[2]。
针对船舶汽轮机的特点,现已有一些成功将预测控制理论应用于非线性汽轮机调速系统的例子。其中,预测函数控制(Predictive Function Control,PFC)是一种基于预测理论的快速控制策略[3],其理论体系已经建立得比较完善,它使控制量有了确切的形式。预测函数控制和广义预测控制一样,都是基于预测模型的控制,因而预测模型的准确性是十分关键的[4]。目前,此类成果较少,所以非线性模型的精确建模方法成为非线性预测函数控制的瓶颈问题[5]。
有学者成功地将神经网络作为预测模型,但由于网络结构复杂,不适用于对快速性要求较高的船舶汽轮机控制。目前,由于支持向量机快速运算的优点,被成功地应用到复杂过程建模和逻辑推理中,在非线性系统建模领域表现良好。针对汽轮机模型存在的非线性、变参数、模型难以描述等特点的非线性系统,用最小二乘支持向量机(LS-SVM)对其模型进行辨识,利用其网络结构简单、运算快速的优点,作为预测函数控制的预测模型,提出了一种船舶汽轮机的基于改进的LS-SVM在线预测函数控制器,实现船舶汽轮机系统的预测函数控制。
1 汽轮机调节系统
增压锅炉产生蒸汽,进入汽轮机汽缸推动汽轮机转子转动,产生机械能,通过轴系、减速器带动螺旋浆转动,从而完成船舶任务[6],如图1所示。关于汽轮机的建模方法,主要归结为2种:机理建模法和实验法。前者需要对汽轮机汽缸的每级热工参数进行计算,计算繁琐且费时。而后者则精确性差。

图1 船舶汽轮机调速系统
本文采用模块建模法对船舶汽轮机进行模块划分。按照图1所示的蒸汽流动过程以及是否可调节,将汽轮机汽缸中的转子分为两类:调节级和非调节级。然后按照蒸汽流动过程,对每个模块建立质量和能量守恒方程,最终得到汽轮机的仿真模型[7-8]。
2 改进的LS-SVM在线辨识
基于以上对汽轮机模型的分析可知,其结构复杂,难以精确建模,并且模型参数随工况变化,因而考虑用先进的非线性辨识方法建立预测模型。
最小二乘支持向量机(Least Squares Support Vector Machines,LS-SVM)是1999年由Suykens J.A.K提出的。与标准支持向量机不同的是,它用等式约束代替不等式约束。损失函数采用最小二乘线性系统,代替传统的支持向量机而采用二次规划方法。

因为船舶航行时改变航向等工况的特点,要求控制系统要快速、实时。采用LS-SVM的在线训练,训练数据随时间更新。既要考虑新的数据中包含的新信息,又考虑旧数据的累积作用。所以引入加权因子和遗忘因子。k时刻,在保持训练数据{xi(k),yi(k)},i=1,2,…,N的长度不变的原则下,每增加一个新数据,舍去一个时间最远的旧数据。但如果只是舍去时间最远的数据,就减弱了训练数据的泛化能力,所以,当产生新的数据xN+1(k)时,将新旧数据相比较,若满足
min(|xN+1(k)-xi(k-1)|)<ξ1.
(1)
表明新数据与旧训练数据集有矛盾,那么,用新数据替换{xi(k-1),yi(k-1)},组成新的训练数据集,而不是简单地舍去时间最远数据。
如果还满足:|yN+1(k)-yi(k-1)|<ξ2,这里,阈值ξ1,ξ2>0,认为系统稳定,维持LS-SVM的模型不变,停止训练。因此,训练集{xi(k),yi(k)}为关于k时刻的函数,同法,Z(k)TZ(k),α(k),b(k)都为关于k的函数,因而有
(2)

若Ωk=Z(k)TZ(k),
(3)
式中:β为遗忘因子,0<β≤1,误差递减收敛到0。遗忘因子的作用是强调新数据作用又考虑了旧数据影响。

综合前面的分析,LS-SVM在线算法步骤为:
1)确定LS-SVM参数K,C,N,β,ξ1,ξ2,建立初始LS-SVM模型;
2)确定训练样本集{xi(k),yi(k)};
3)计算误差ei,权值λ,系数μ;
4)将λ代入式(3)计算参数,得到回归模型;
5)k=k+1,到步骤2)。
3 控制器设计
3.1 模型辨识
船舶汽轮机系统可描述为
y(k+1)=f(xk(1),xk(2),…,xk(nu+ny))=
f(y(k),…,y(k-ny+1),u(k),…,
u(k-nu+1)).
(4)

图2 控制系统结构
式中:f(·)为未知非线性函数,用来描述船舶汽轮机系统特性;输入阶数为nu,输出阶数为ny。
对船舶汽轮机系统进行LS-SVM拟合,即对式(4)拟合,有

(5)
C+a1y(k)+…+aNy(k-N+1)+b1u(k)+…+bMu(k-M+1).
(6)
3.2 参考轨迹与反馈校正
k+i时刻的参考轨迹为
yr(k)=y(k).
(7)
式中:ysp为给定值,柔化系数0<αr<1。
反馈校正后,k+i时刻的预测输出为
(8)

(9)
3.3 性能指标与最优控制量
选择性能指标函数为
rΔu(k)2.
(10)
式中:q和r为权系数。
3.4 控制算法步骤
基于在线LS-SVM单步预测函数控制算法步骤为:
1)支持向量机参数和预测参数C,N,M,ysp,αr选定;
2)选取训练数据集,得到汽轮机辨识模型,得到αi,b;
3)对于时刻k,期望设定值yr(k+1)由方程(7)求得;
4 仿真分析
4.1 线性核函数LS-SVM单步预测函数控制设计



(11)


yi(k-1),…,yi(k-N)].
反馈校正后,得到
(12)

对于单步预测,选取式(10)为性能指标函数,最小化式(7),并对μ(k)求偏导,令其为0,得
(13)
即
2qg[gu(k)+h+b(k)+e(k)-yr(k+1)]+
2r[u(k)-u(k-1)]=0.
(14)

u(k)=

(15)
若为多步预测时,同样方法可得到最优控制量。
4.2 仿真分析
在MATLAB仿真环境下,汽轮机仿真参数如下:螺旋浆功率系数C=0.65,调节级效率72.55%,非调节级效率80%,调节级的额定进汽流量G10=166.3 t/h,进口的蒸汽压力P1=6 MPa、额定压力P10=5.6 MPa、温度T1=460 ℃,调节级出口的蒸汽压力P2=4 MPa,流量修正系数β1=1,临界压比εcr=0.546,非调节级进口的蒸汽压力Pf1=4 MPa、蒸汽温度Tf1=300 ℃,出口温度压力Pf1=0.2 MPa,Tf1=62 ℃。

1)工况改变。t=50 s时,汽轮机系统由经济工况变为全工况,即给定转速升高,如图3所示,将LS-SVM预测函数控制与RBF预测函数控制比较。由图可见,经济工况时,RBF预测函数控制响应时间35 s,超调18%,而LS-SVM预测函数控制响应时间20 s,无超调。工况由经济工况变到全工况时,RBF预测函数控制响应时间30 s,无超调,LS-SVM预测函数控制响应时间12 s,无超调。因而两种控制方法相比较,LS-SVM预测函数控制的快速性要好一些。

图3 控制比较曲线
2)有持续的扰动情况。如图4所示汽轮机系统工作在经济工况t=30 s时,加入±2%随机负荷的扰动,从仿真曲线可看出,对转速产生干扰。控制器能有效抑制存在的扰动,螺旋浆转速在给定的转速范围内发生了波动。

图4 负荷扰动的仿真曲线
3)负荷突增情况。如图5所示,船舶运行在经济工况t=30 s时,汽轮机负荷突增5%,但仍要求汽轮机转速稳定,通过控制凸轮转角变化,响应时间15 s后,螺旋浆转速重新稳定。
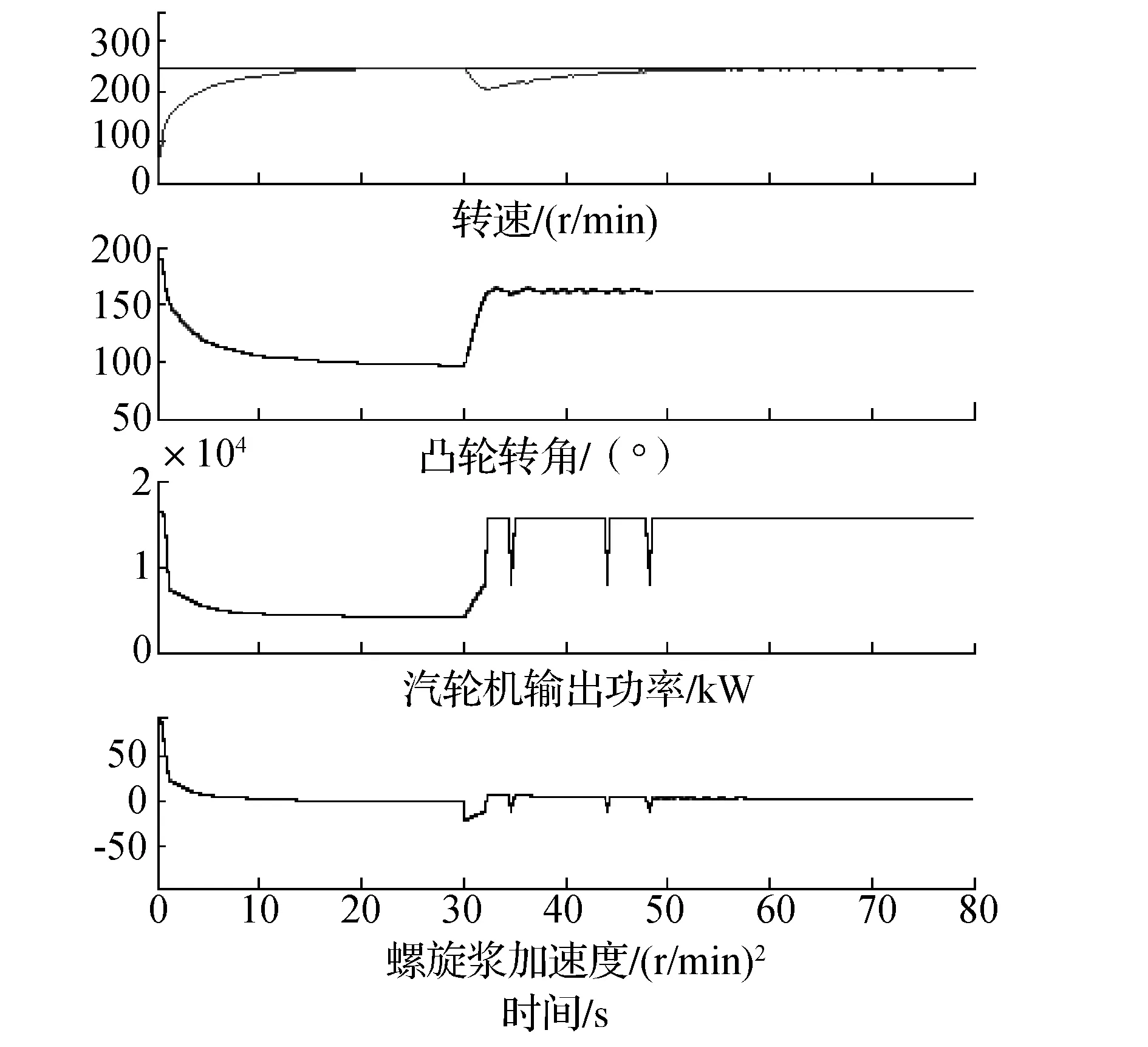
图5 突增负荷时的仿真曲线
由以上仿真结果可以看出,用最小二乘支持向量机对船舶汽轮机模型进行辨识,并作为预测模型进行船舶汽轮机调速系统的预测函数控制是可行的,对于工况变化、负荷扰动等实际航行情况达到了令人满意的控制效果。
5 结束语
本文针对船舶汽轮机系统的控制难点,将LS-SVM与预测函数控制方法相结合,给出了一种基于LS-SVM的预测函数控制器的设计方法。利用LS-SVM良好的非线性逼近能力,对汽轮机非线性模型进行辨识,实现了船舶汽轮机系统的预测函数控制,对于工况变化及有扰动的情况达到了满意的控制效果。
[1]田兆斐,张志俭.船舶饱和蒸汽轮机动态特性仿真[J].汽轮机技术,2005,47(2):90-92.
[2]张俊迈,胡德明.舰船汽轮机[M].北京:国防工业出版社,1992:5-9.
[3]张泉灵,王树青.基于ARMAX模型自适应预测函数控制[J].信息与控制,2000,29(5):431-436.
[4]丁宝苍.预测控制的理论与方法[M].北京:机械工业出版社,2008:1-2.
[5]王国玉,韩璞.预测函数控制及其应用研究[J].系统仿真学报,2002,14(8):1087-1091.
[6]王希季.钟芳源.船舶汽轮机原理与计算[M].北京:北京科技教育出版社,1961:3-21.
[7]倪何,程刚,孙丰瑞.某型船用汽轮机本体模块化建模和仿真[J].船舶工程, 2007, 29(3):9-12.
[8]苏明,翁史烈.大型汽轮机的模块化仿真建模[J].系统仿真学报,2010(3):30-34.
[9]LEI BICHENG,WANG WANLIANG,LI ZUXIN.On-Line Predictive Control Based on LS-SVM[J].Proceedings of the 7th World Congress on Intelligent Control and Automation, 2008:7870-7873.
[10]LI Li-Juan, SU Hong-Ye, CHU Jian.Generalized Predictive Control with Online Least Squares Support Vector Machines[J].ACTA AUTOMATICA SINICA, 2007,33(11):1182-1188.
[11]ATA-DOSS S A,FIANI P,RICHALET J.Handling Input and State Constraints in Predictive Functional Control[J].Proc.30th CDC, Brighton,UK,1991,(12):985-990.
本刊声明
为适应我国信息化建设,扩大本刊及作者知识信息交流渠道,本刊已成为北京万方数据股份有限公司、万方数据电子出版社、中国学术期刊(光盘版)电子杂志社、重庆维普资讯有限公司中文科技期刊等数据库全文收录期刊。来稿一经录用,均视为作者已将该作品全文的数字化方式复制权、发行权、汇编权、翻译权以及信息网络传播权授予本刊编辑部。编辑部已将作者著作权使用费与本刊稿酬一次性结清。作者向本刊提交文章发表的行为即视为接受我刊上述声明的条款。如作者不同意将文章编入该数据库,请在来函中声明,本刊将做适当处理。
Improvedpredictivefunctioncontrolofmarinesteamturbinesystem
LIU Chao1,XIA Ying-hua1,ZHANG Yu2*
(1.Northeast Light Alloy Co.,Ltd.,Harbin 150001,China 2.CMEE,Northeast Forestry University,Harbin 150040,China)
In order to ensure of the safety and mobility of the ship,first it needs to obtain the security and stability of marine steam turbine.With the rapid increase in the capacity of the units,and performance improved,a higher requirement controller is needed.Marine steam turbine has the characters such as nonlinear and variable parameters,and the model is difficult to give.So predictive function control and least squares support vector machine are combined.The LS-SVM model is used as online identification of the turbine system.The design method of predictive function controller based on LS-SVM is given.The computer simulation results show that the control strategy can effectively control the marine steam turbine systems,and realize the intelligent control of the marine power system.
steam turbine; predictive function; LS-SVM; nonlinear control; identification
2014-05-12
中央高校基本科研业务费专项资金资助(2013BBQ01);国家自然科学基金资助项目(51306030)
刘超(1972-),男,高级政工师,研究方向:复杂系统智能控制.
TP273
A
1671-4679(2014)06-0001-05
郝丽英]
猜你喜欢
船舶(2021年4期)2021-09-07
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
小哥白尼(趣味科学)(2019年10期)2020-01-18
电子制作(2019年22期)2020-01-14
船舶标准化工程师(2019年4期)2019-07-24
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
中国船检(2017年3期)2017-05-18
广西电力(2016年4期)2016-07-10
工业设计(2016年4期)2016-05-04