
Control Methods on Colored Noise by Using AR Model in Dynamic North Seeking*
2014-09-08 10:51JIANGQingxianWANGChengbinMAXiaohuiBAIYunchao
传感技术学报 2014年3期
JIANG Qingxian,WANG Chengbin,MA Xiaohui,BAI Yunchao
(State Key Laboratory of Geo-Information Engineering,Xi’an Research Institute of Surveying and Mapping,Xi’an 710054,China)
Control Methods on Colored Noise by Using AR Model in Dynamic North Seeking*
JIANG Qingxian*,WANG Chengbin,MA Xiaohui,BAI Yunchao
(State Key Laboratory of Geo-Information Engineering,Xi’an Research Institute of Surveying and Mapping,Xi’an 710054,China)
An all-attitude north seeker adopting rotary modulation technology is researched,which employs dynamically tuned gyroscope as angular velocity sensor.In order to control influence of colored noises on dynamic north seeking,AR model of colored noise is established and model parameters are fitted as well as colored noises are predicted by using observation residuals.On the basis of robust estimation,a mixed iterative algorithm based on high breakdown point initial value and assisted by IGGⅢscheme is constructed by using corrected observations.The calculations show that fitting and predicting colored noises by adopting AR model can effectively control influence of colored noises on dynamic north seeking.In turn,precision and reliability of dynamic north seeking are improved. Key words:north seeker;colored noise fitting control;AR model;revolution-modulation;robust estimation
陀螺寻北仪是一种采用陀螺仪作为角速率传感器、快速精确测定真北方位的仪器。近年来随着惯性技术、电子技术和计算机等技术的进步,采用各种原理和方法研制的陀螺寻北仪不断涌现。目前陀螺寻北法主要有罗经法、速度法和角度法[1-3]。速度法寻北普遍采用多位置寻北,但需要转位机构控制惯性测量单元在规定的时间内停在规定的位置,因此实际采用二位置法和三位置法等。近年来兴起了动态旋转调制寻北法,在寻北过程中,惯性测量单元以恒定的角速度绕其垂直中心轴连续转动,等间隔采样陀螺的输出信号,进而解算出陀螺敏感轴的真方位角[4-6]。其优点是通过连续转动使陀螺的常值漂移、随机漂移受到周期性调制,通过积分得到消除,因而可显著提高寻北精度。但是,转台振动引起的转速不均匀会造成陀螺输出信号中含有大量不同频率的噪声[7-8],进而对寻北精度产生较大影响。
影响动态寻北精度的主要误差是陀螺随机漂移项中各种与频率相关的干扰误差。它们是弱非线性、缓慢时变且易受外部环境等多种因素的影响,是具有一定时空相关性的有色噪声,对寻北精度和可靠性影响很大,必须在数据处理中加入有色噪声的检验和建模。现已形成了多种减弱和消除有色噪声影响的方法,如附加有色参数滤波法、相邻观测值组差法、基于滤波残差建模法、自适应滤波和自适应抗差滤波等[9-11]。通过对有色噪声建模、拟合、预报,并对观测值进行误差修正,使观测值中仅留下白噪声或近似白噪声[12-14],进而基于抗差估计原理构造高崩溃污染率的初值辅以IGGⅢ方案迭代解算的混合算法,可以削弱载体扰动和有色噪声对寻北精度的共同影响。
1 有色噪声的拟合与预报
1.1有色噪声的拟合

设有观测序列L1,L2,…,Ln,tk时刻的观测方程为式中,X为参数向量;A为设计矩阵;ek为真误差向量,其协方差矩阵为Σk。
当ek为有色噪声时,采用时间序列分析法描述有色噪声。ek的AR模型为[15]

式中,βi<1(i=1,2,…,p)称为自回归参数;Δk为高斯白噪声。
将tk时刻的观测残差表示为
vk=β1vk-1+β2vk-2+…+βpvk-p+Δk(3)
对于观测残差序列,有误差方程
式中,V为伪观测向量,即观测残差向量的后n-p项;R为V的残差向量,B为新的设计矩阵。
为了抵制异常观测的影响,引入抗差估计控制粗差的影响以获得可靠的AR模型参数。模型参数的抗差估计解为:

式中P¯v为残差向量的抗差等价权矩阵,其元素为[16]:
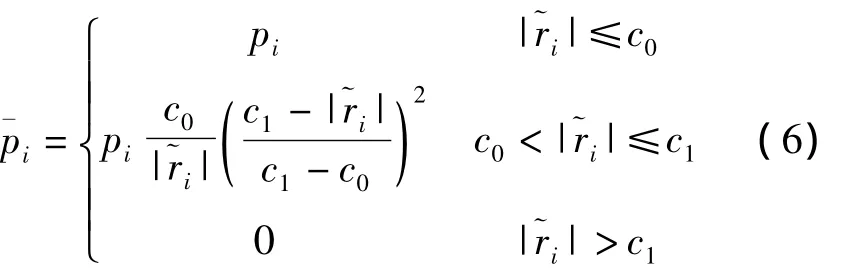
式中,pi为观测残差的先验权为单位权均方差因子估值,利用初次平差的残差由中位数法求得;c0、c1为等价权函数的临界值,一般c0∈[1.5~2.5],c1∈[3.0~8.5]。
1.2 有色噪声的预报
在使用式(5)获得AR模型的参数后,有色噪声的预报值可表示为[13-14]

改进的观测值¯Lk为

2 基于抗差估计的旋转调制寻北算法
如图1如示,将动调陀螺垂直安装在转台上,使其敏感轴与转台台面平行。电机的转速由稳速电路控制,转台以恒定的角速度Ω旋转。通过对光电编码器的位置采样,结合陀螺在相应位置的输出,解算得到陀螺敏感轴相对真北方向的初始方位角ψ。
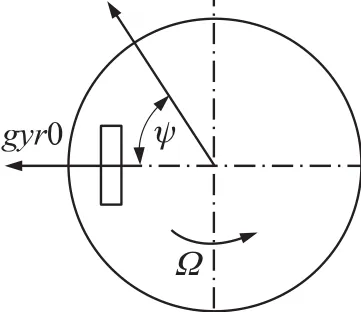
图1 寻北原理示意图
建立如下坐标系:①地理坐标系OXnYnZn,其方向分别为东、北、天向;②转台坐标系为OXbYbZb,其中Xb轴指向光栅零位,Yb轴指向光栅90°方向,Zb轴指向旋转轴;③陀螺坐标系为OXmYmZm,其中Xm轴与陀螺x轴重合,Ym与陀螺y轴重合,Zm轴指向旋转轴。设转台的航向角、横滚角和俯仰角分别为ψ、θ和γ(逆时针为正)。当地地理纬度为φ,地球自转角速率ωie=15.04108(°)/h。
陀螺坐标系中陀螺x敏感轴感测的角速率为[17]:

假定转台台面平行于当地水平面,即转台的横滚角θ和俯仰角γ分别为零时,理论上陀螺的动态输出表示为:

式中K为系数,ε(t)为陀螺漂移。
采用滤波方法把陀螺的随机漂移滤除,仅考虑陀螺漂移的常值项ε0时,陀螺的输出表示为:

设参数X=[x1x2x3],x1=Kcosψ,x2=Ksinψ,x3=ε0,L=[ω1(t)ω2(t)…ωn(t)]T,A=[ωiecosφsinαωiecosφcosα1]。
误差方程为
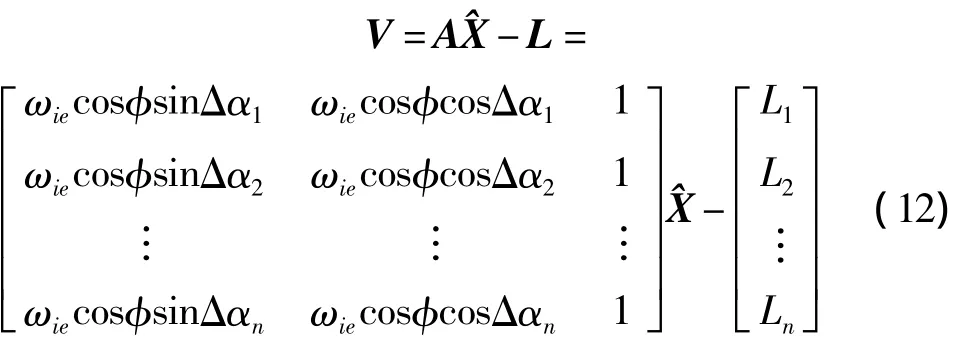
式中,V为n×1维残差向量,^X为参数向量估值。
有色噪声改进后,重写误差方程如下:

利用抗差估计可获得参数的抗差估值^Xk为

式中¯P为观测值的抗差等价权矩阵,形式如式(6)所示。
^Xk的协方差矩阵为

式中^σ20=VT¯PV/(n-t-t0),t为参数个数,t0为等价权为零的观测值个数。
因此,陀螺敏感轴初始方位角、陀螺标度因数、陀螺漂移的估值为
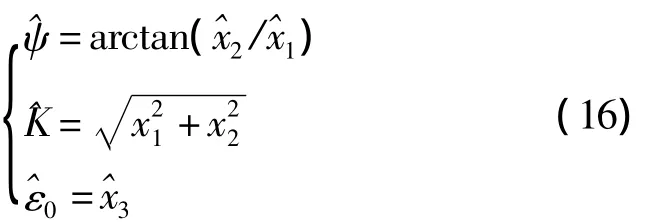
根据^x1和^x2的符号可以确定陀螺敏感轴所在的象限,进而可以唯一确定陀螺敏感轴相对真北方向的初始方位角。
3 计算与分析
试验数据来自动调陀螺寻北仪,进行了6个测回的寻北试验。动调陀螺的一次启动漂移稳定性小于0.03(°)/h,转台的转速设定为5 r/min,分别采集陀螺仪x、y轴的输出信号,采样率为25 kHz。采用高精度的锁相稳速控制电路使转台速率的相对稳定度达到10-4,DSP+FPGA构成了数据的高速采集与解算单元。
对测试数据采用以下5个方案处理。抗差估计中迭代收敛的条件为|^xk+1-^xk|≤0.001。由于没有得到真方位角的实际值,计算中采用一测回寻北中误差考核寻北精度。表1给出方位角的计算结果,表2给出每个测回计算值的的权值,测值的权反映了每个测回的方位角计算值对本方案中方位角估值的贡献。

表1 寻北结果
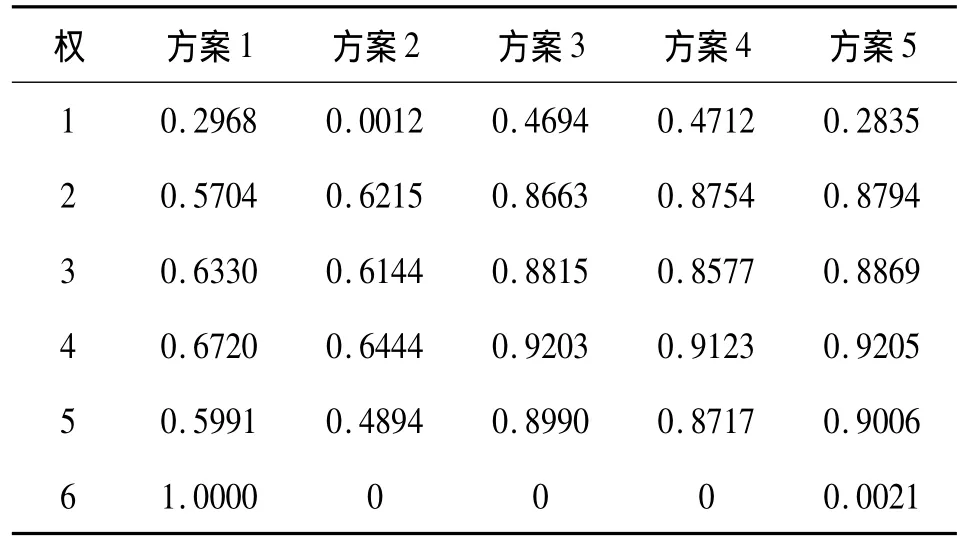
表2 方位角的权值
方案1:不考虑有色噪声影响的最小二乘估计;
方案2:不考虑有色噪声影响的抗差估计;
方案3:对有色噪声进行最小二乘拟合的最小二乘估计;
方案4:对有色噪声进行最小二乘拟合的抗差估计
方案5:对有色噪声进行抗差拟合并进行加权预报的抗差估计;
由于陀螺的输出为一条正弦曲线,为了直观显示有色噪声拟合的效果,文中给出观测值的原始残差和有色噪声拟合后的观测残差,如图2、图3所示。由此可以看出原始残差的幅值<±0.2(°)/h,而经过有色噪声拟合后的观测残差<±0.1(°)/h。
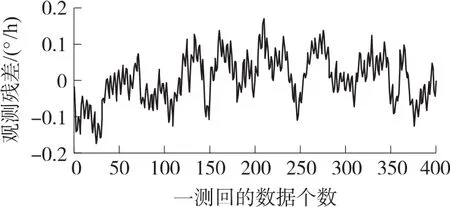
图2 原始残差
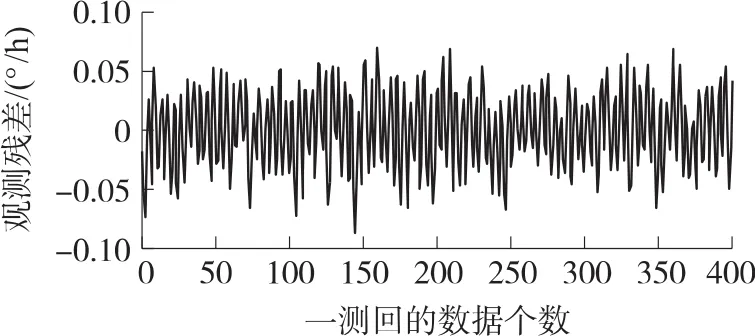
图3 有色噪声拟合后的残差
分析上述结果,可得如下结论:
①最小二乘估计不具有抗差性,其控制粗差影响的能力低于抗差估计。尽管算例中第6测回的计算值与方位角的估值相差很大,但在求解过程中其权值为1,造成估值偏大,且中误差较大。
②陀螺仪信号中包含有色噪声时,动态寻北的精度和可靠性会受到严重的影响,采用AR模型对有色噪声进行拟合和预报,能够有效削弱有色噪声的影响。
③抗差估计能够削弱信号中存在的异常干扰的影响,当观测值含有粗差时,采用抗差估计拟合AR模型参数能够使参数免受粗差的影响,从而更好控制有色噪声对寻北的影响。
④采用抗差估计对有色噪声进行拟合,在此基础上进行抗差估计能够对载体扰动和有色噪声具有更强的控制能力。
4 结束语
旋转调制陀螺寻北仪通过机械转台调制陀螺的相位信号,并从中解算出陀螺的真方位角。在采用最小二乘法解算偏北方位角时,若观测值存在异常,则最小二乘解将极不可靠。抗差估计能够有效减弱异常干扰对参数估计的影响,并且可以将异常干扰剔除而不影响其余有用信号。当陀螺仪信号中含有色噪声和异常干扰时,采用抗差估计对有色噪声进行拟合,在此基础上进行抗差估计能够对载体扰动和有色噪声具有更强的控制能力。
[1]彭智宏,张乐,王慧,等.国内外寻北技术简介[J].导航与控制,2003,2(2):77-78.
[2]赵治伟,许卫东.陀螺寻北技术概述[J].宝成科技,2004,67 (2):1-4.
[3]石仕杰.光纤陀螺寻北仪技术研究[D].长沙:国防科技大学,2004.
[4]Sung-Jin Kim,Sang-Sik Lee,Yong-Soo Kwon.Dynamic North-Finding Scheme Based on a Fiber Optic Gyroscope[J].Proceeding of SPIE,1997,3087:126-136.
[5]张思将,秦石乔,王省书.连续旋转式激光陀螺寻北仪研究[J].航空兵器,2006(1):12-15.
[6]徐建华,谢玲,高亚楠,等.旋转调制式寻北仪滤波技术研究[J].北京理工大学学报,2005,25(8):718-721.
[7]刘东波,刘建业,赖际舟.基于光纤陀螺的单周快速动态寻北算法研究[J].传感器与微系统,2007,26(11):61-64.
[8]刘东波,刘建业,赖际舟.应用小波变换的光纤陀螺动态寻北[J].应用科学学报,2008,26(l):95-99.
[9]赵长胜.有色噪声滤波理论与算法[M].北京:测绘出版社,2011.
[10]崔先强.动态定位有色噪声自适应抗差滤波理论的拓展与应用研究[D].长安大学,2012.
[11]崔先强,杨元喜,高为广.多种有色噪声自适应滤波算法的比较[J].武汉大学学报(信息科学版),2006,31(8):731-735.
[12]杨元喜,崔先强.动态定位有色噪声影响函数——以一阶AR模型为例[J].测绘学报,2003,32(1):6-10.
[13]吴富梅,杨元喜.顾及有色噪声的光纤陀螺信号的抗差谱分析[J].测绘科学与工程,2006,26(3):50-53.
[14]杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006: 178-185.
[15]刘永红,范跃祖.激光陀螺漂移的非平稳随机信号建模[J].战术导弹控制技术,2004,46(3):99-102.
[16]Jiang Qingxian,Wu Fumei.Robust Estimation for FOG Data Based on Wavelet Threshold De-Noising[J].传感技术学报,2009,22 (l1):1596-1601.
[17]Jiang Qingxian,Bai Yunchao,Ma Xiaohui.Fast Dynamic North-Seeking Algorithm Based on Robust Estimation[J].传感技术学报,2013,26(1):43-48.

蒋庆仙(1969-),女,硕士,西安测绘研究所高级工程师,主要研究方向为陀螺定向系统设计、陀螺仪误差建模,jiangqingx@163.com。
利用AR模型进行动态寻北中有色噪声的控制*
蒋庆仙*,王成宾,马小辉,白云超
(地理信息工程国家重点实验室,西安测绘研究所,西安710054)
采用旋转调制技术,研究了以动调陀螺为角速率传感器的全姿态寻北仪。为了控制有色噪声对动态寻北的影响,利用观测残差建立了有色噪声的AR模型,对有色噪声进行了拟合与预报,并利用改正后的观测信息、基于抗差估计原理构造了高崩溃污染率的初值辅以IGGⅢ方案迭代解算的混合算法。计算结果表明:采用AR模型对有色噪声进行拟合与预报,能够有效控制有色噪声的影响,并提高动态寻北的精度和可靠性。
寻北仪;有色噪声控制;AR模型;旋转调制;抗差估计
U666.1
A
1004-1699(2014)03-0347-04
2013-12-19修改日期:2014-03-04
C:7230E;7630
10.3969/j.issn.1004-1699.2014.03.014
项目来源:国家自然科学基金项目(41004013,41004080)
猜你喜欢
中老年保健(2022年6期)2022-08-19
科学技术创新(2021年34期)2021-12-14
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
Coco薇(2017年8期)2017-08-03
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
河南科技(2015年18期)2015-11-25
测绘学报(2015年5期)2015-11-07
导航定位学报(2015年2期)2015-06-05
大地测量与地球动力学(2015年2期)2015-02-13

- 传感技术学报的其它文章
- Design and Implementation for Diarrheic Shellfish Poison Detection Based on Electrical Cell-Substrate Impedance Sensing*
- A Design of ECG Signal Monitoring System Based on Intelligent Terminal
- A Study of Multi-Channel sEMG De-Noising and Aliasing Removal*
- Analysis of Temperature Characteristic and Design of Interface ASIC Based on Ring Schottky Diode for MEMS Gyroscope*
- Fabrication and Characteration of NiCr-NiSi Thin Film Thermocouples on CFCC-SiC Substrate*
- Fluxgate Magnetometer with Low-Cost and High-Resolution Based on ARM*