
Analysis of Temperature Characteristic and Design of Interface ASIC Based on Ring Schottky Diode for MEMS Gyroscope*
2014-09-08 10:51SHENGuangchongLUWengaoLIUMingxingLIXiaoliangZHANGYacongCHENZhongjian
传感技术学报 2014年3期
SHEN Guangchong,LU Wengao,LIU Mingxing,LI Xiaoliang,ZHANG Yacong,CHEN Zhongjian
(1.School of Electronic and Computer Engineering,Peking Universit Shenzhen Guangdong 518055,China; 2.National Key Laboratory of Science and Technology on Micro/Nano Fabrication,Peking University,Beijing 100871,China)
Analysis of Temperature Characteristic and Design of Interface ASIC Based on Ring Schottky Diode for MEMS Gyroscope*
SHEN Guangchong1,2,LU Wengao2*,LIU Mingxing2,LI Xiaoliang1,2,ZHANG Yacong2,CHEN Zhongjian2
(1.School of Electronic and Computer Engineering,Peking Universit Shenzhen Guangdong 518055,China; 2.National Key Laboratory of Science and Technology on Micro/Nano Fabrication,Peking University,Beijing 100871,China)
This paper describes the design of interface ASIC based on ring Schottky dioed for MEMS gyroscope and analyzes influence of temperature characteristic of Schottky diode to the interface ASIC.A carrier of 1MHz is used to drive the mass and move the variation signal to the region nearby 1MHz by modulation.The modulated signal is demodulated by ring Schottky diode.This scheme can amplify signal of gyroscope effectively.It shows that the non-ideality of Schottky diode varies gain of the circuit.Feedback resistor with negative temperature coefficient is used to decrease total temperature coefficient.This circuit is implemented in 0.18 μm CMOS process.
ASIC;MEMS gyroscope;ring Schottky diode;temperature characteristic
MEMS陀螺仪是用来检测运动物体角速度信号的惯性传感器件,在汽车电子与消费电子领域应用广泛,甚至在国防与航空等领域也有应用报道[1]。相比于传统陀螺仪,MEMS陀螺仪可以使用成熟的MEMS工艺制造,具有成本低,体积小,功耗低,以及易于同ASIC电路集成的优点[2-3]。但是,MEMS陀螺仪性能和传统陀螺仪相比还有很大差距[4]。理想的MEMS陀螺仪具有固定的参数,对噪声不敏感,但是真实的MEMS陀螺仪由于制造工艺的偏差,会存在各种干扰和耦合,因此设计闭环控制电路补偿陀螺仪中的各种非理想因素,已经成为设计高性能MEMS陀螺仪的主要方法[5]。作为闭环控制电路的前端接口部分,接口电路的噪声、精度、动态范围和灵敏度直接影响到闭环控制电路的性能[6-7]。
本文分析了MEMS陀螺仪读出电路的原理,提出了环形肖特基二极管与跨阻放大器结构,理论分析了它的功能与温度特性。在此基础上,设计了一款MEMS陀螺仪接口ASIC电路,适用于谐振频率3 kHz~10 kHz的MEMS陀螺仪。
1 MEMS陀螺仪与电路原理分析
MEMS陀螺仪基于科里奥里力效应[8],是一种线振动陀螺仪。图1所示是EMMS陀螺仪的结构图。它包含两个振动模态,即驱动模态与检测模态[9]。其中,沿驱动轴即x轴方向给质量块施加正弦激励,质量块做正弦运动,如果在z轴方向施加一个角速度Ω,将在检测轴即y轴方向产生一个科氏力,使质量块在y轴方向发生位移,从而改变检测轴检测电容的大小。
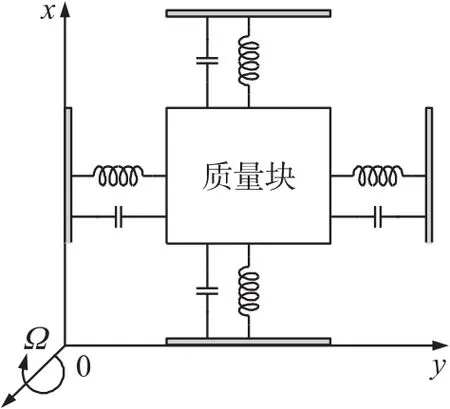
图1MEMS陀螺仪结构
当电容两边存在电压差时,电容大小改变会影响电容极板上的电荷,电荷的移动形成电流,当该电流流经电阻时会产生电势差,从而检测电容的改变被转变为模拟电路擅长处理的电压信号。然而,检测电容改变引起的电流非常微弱,如果采用很大的电阻对该电流放大,将引入热噪声。在本设计中采用了高频载波调制方案[10]:在陀螺仪的质量块上施加一个MHz量级的载波,电容变化信号会以载波频率量级放大,从而极大的减轻了电路设计的压力,这将在第2节分析证明。
2 电路原理分析与设计
环形肖特基二极管和跨阻放大器[11]TIA模块是本设计接口电路的第1级,下文将对该电路功能与温度特性进行详细分析。
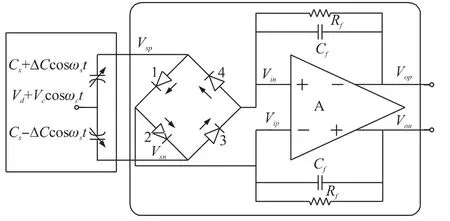
图2环形肖特基二极管与TIA
图2 所示是环形肖特基二极管和TIA的结构框图。肖特基二极管具有比较低的势垒和较高的截止频率[12]。环形二极管常应用在调制解调器中,结构简单,功耗低。Vd+Vccosωct表示施加在陀螺仪质量块上的载波,Cs和ΔCcosωst分别表示陀螺仪检测电容的静态和可动部分。首先,我们假设肖特基二极管为理想开关,然后我们考虑了非理想肖特基二极管的温度特性,在这两种情况下,推导了该电路输出表达式。
2.1 理想肖特基二极管
假设肖特基二极管的阈值电压为0,导通电阻为0,反向电阻无穷大,这样,肖特基二极管可以看做一个理想开关。当载波的电压上升时,肖特基二极管1和3导通,2和4截止,有Vxp=Vip和Vxn= Vin,可以得到公式,
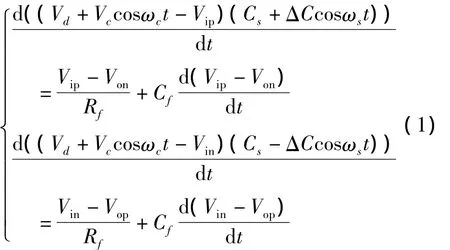
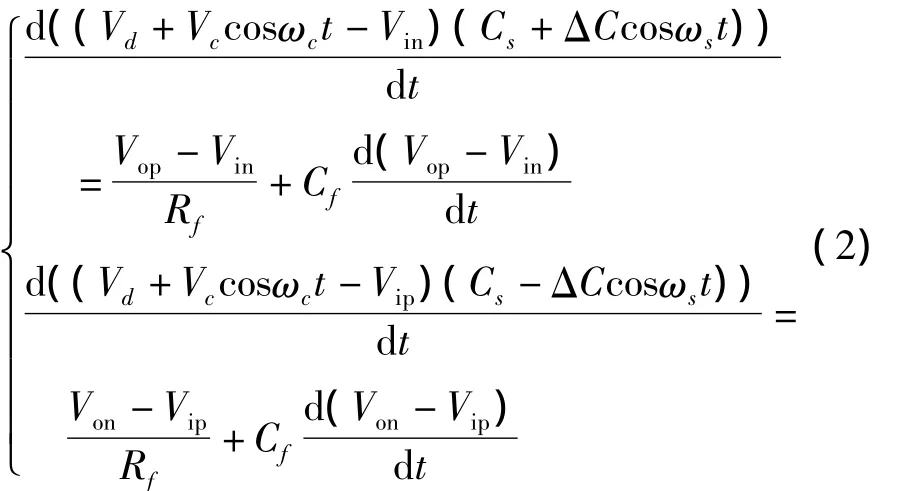
当载波电压下降时,肖特基二极管2和4导通,1和3截止,有Vxp=Vin和Vxn=Vip,可以得到公式

假设TIA中放大器具有有限增益A,且A≥1,则通过负反馈作用,运放输入点的差模信号Vip-Vin极小。将式(3)和式(4)相加,忽略(Vip-Vin)·ΔCcosωst的影响,有其中Vicm表示输入点共模电压,Vocm表示输出点共模电压。该公式可以指导合理选择反馈电容Cf和Vc,防止运放输入点共模电压超出正常范围,从而影响TIA的正常工作。同样,可以得到TIA输出差模信号

从(7)可以看出,Vod与载波的频率与幅度成正比。通常载波频率在MHz量级,因此电容变化信号得到极大地放大,从而降低了对前端电路增益的要求。
2.2 非理想肖特基二极管特性及温度特性
正向导通非线性,反向特性和电荷存储效应是导致二极管非理想的几个主要方面[13]。在我们的设计中,温度特性是主要考虑的问题,温度变化会改变肖特基二极管的阈值电压VD和导通电阻Ron。相比于载波频率的变化,温度变化非常缓慢,所以可以将温度变化引起的VD和Ron的改变看作关于时间慢变函数。设Vsd,m表示肖特基二极管m(m=1、2、3或者4)的导通电压,则有

其中maxωT,n≤ωs。
当载波电压上升时,有
当载波电压下降时,有

假设4个肖特基二极管是完全匹配的,联合方程(8)~(10)可以得到


根据本设计中的典型值,假设在1 s内,温度从300 K变化到310 K,基于仿真可以得到,肖特基二极管的电阻从1.578 kΩ变化到1.532 kΩ。可以认为max(ωT,n)≈3.14 rad/s且max(Rsd,n)≈23 Ω。根据这些参数可以得到max(αn)≈4.6×10-13。αn如此微小,我们可以忽略它的影响,则有

同样可以求得,TIA差模输出电压
式(11)中,N1项可以被高通滤波器滤除。使用上面的典型值,可求得max(β2,n)≈3×10-14,max(β3,n) =8×10-7且max(β4,n)=3.4×10-5,所以N2和N3可以忽略不计。N4仅引入一个小的相移。略去N1、N2和N3,则有

其中θ表示N4引入的相移。
由式(12)可以看出,肖特基二极管的阈值电压随温度的漂移会改变电路增益,影响差模输出电压。
2.3 电路结构设计
基于2.1节与2.2节的分析,基于环形肖特基二极管与TIA结构的电路可以正确读出陀螺仪检测信号,并转换为电压信号。肖特基二极管的温度特性会影响电路输出增益,贡献一个正温度系数。在本设计中,采用具有负温度系数的p掺杂多晶硅电阻作为TIA反馈电阻Rf,从而降低整体电路的温度系数。
本文完成了MEMS陀螺仪闭环控制系统的模拟接口部分设计。该电路将MEMS陀螺仪电容振动信号读出,并转换为电压信号。图3是该电路的结构框图。图中,圆角矩形方框表示MEMS陀螺仪,直角矩形框表示模拟接口电路。可以看出,该系统由完全对称的驱动轴和检测轴构成,这样可以减小电路本身引入的驱动轴与检测轴之间的相位差。这个相位差会降低角速度信号的解调效率。
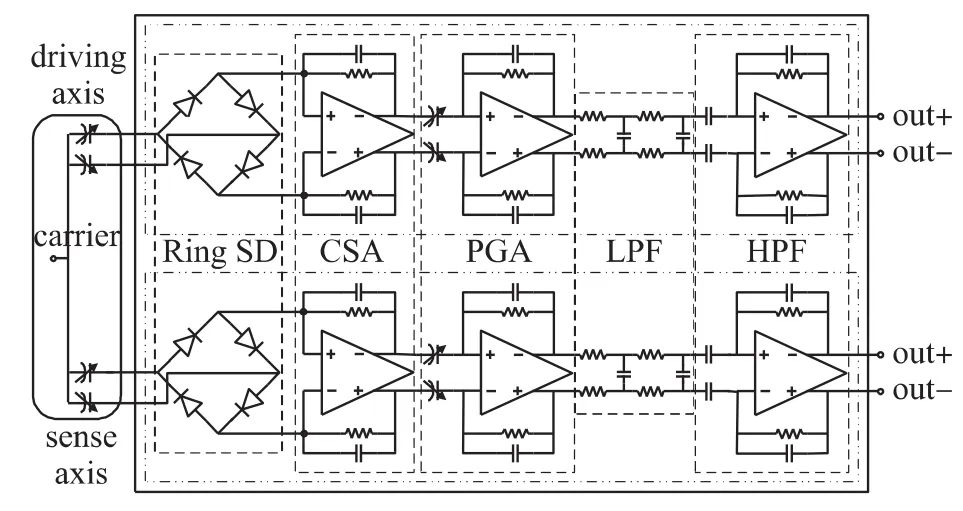
图3 模拟接口电路框图
本设计中,在陀螺仪质量块上施加一个频率为1 MHz的载波,将MEMS陀螺仪检测电容的变化信号调制到高频载波附近。使用环形肖特基二极管对该已调信号解调,同时将陀螺仪的低频噪声调制到高频附近。跨阻放大器(TIA)将该信号转换为电压信号,同时TIA具有低通滤波器的功能,将高频噪声滤除。电容式放大器(PGA)增益可调,对信号继续放大。低通滤波器(LPF)和高通滤波器(HPF),进一步衰减信号中的高频干扰和低频噪声,同时有源结构的HPF可以保证输出信号的驱动能力。
3 仿真结果
仿真条件为温度300 K,电源电压5 V,驱动轴与检测轴驱动电压频率都是8 kHz。驱动轴与检测轴输出信号间的延时差为16 ns,相位差为0.05°。
图4所示为不同温度下的肖特基二极管I-V特性,当温度由-40℃变为125℃时,阈值电压单调下降。基于式(10)、式(12),电路输出共模信号和差模信号与肖特基二极管阈值电压成反比。
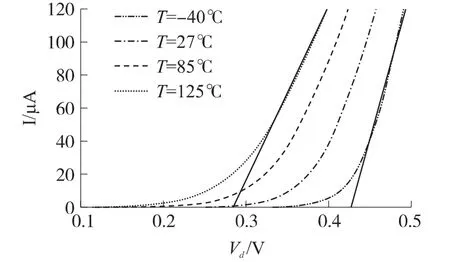
图4肖特基二极管I-V特性
图5 所示为仿真结果,随着温度上升,肖特基二极管阈值电压单调下降,电路输出共模信号和差模信号单调上升。理论结果与仿真结果具有相同趋势。
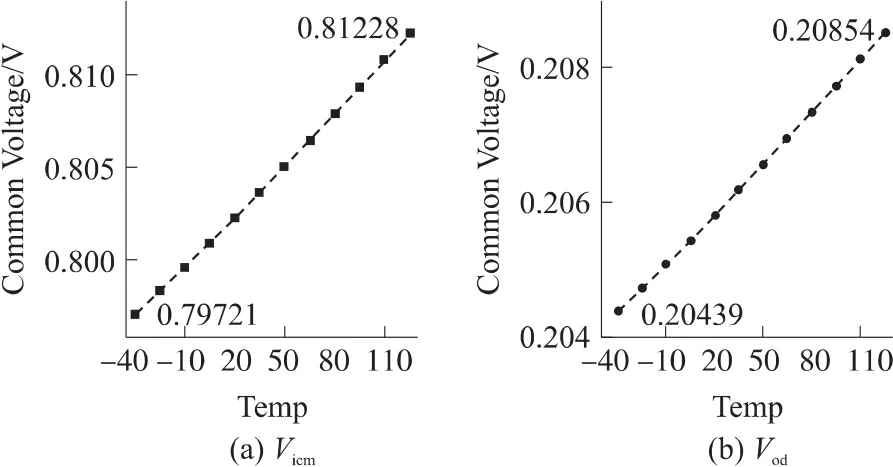
图5Vicm和Vod随温度变化
4 测试结果
4.1 电路实现
该电路基于0.18 μm CMOS工艺实现,图6是该电路的版图照片,面积是1.5 mm×2.3 mm。驱动与检测轴电路几乎完全对称,这样可以降低驱动轴与检测轴之间的相位差。数字接口,电流基准和测试模块式该电路的辅助部分。
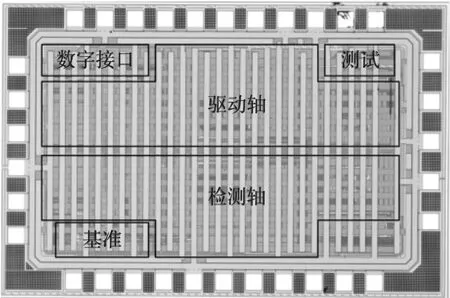
图6 电路版图照片
4.2 测试结果
测试所用MEMS陀螺仪参数如下:驱动轴Q值和谐振频率分别为2633 Hz和7839 Hz;检测轴Q值和谐振频率分别为521 Hz和8054 Hz。在5 V电压下,对该接口ASIC进行了开环测试。
图7所示是在固定幅度固定频率电压驱动下,ASIC电路驱动轴输出信号,可以看出输出信号相位落后驱动信号90°,说明陀螺仪驱动轴处于谐振状态。
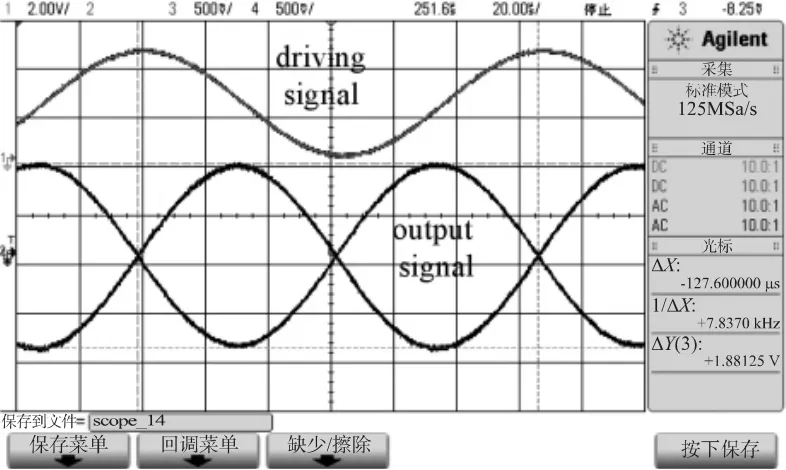
图7 驱动轴输出信号
如图8所示,检测轴输出信号幅度与载波频率成正比,与驱动电压幅度呈正比,说明式(5)理论分析正确。

图8 检测轴输出信号幅度-载波频率(a)和输出信号幅度-驱动电压幅度(b)
5 结论
基于0.18 μm CMOS工艺,本文设计了一款适用于MEMS陀螺仪的模拟接口电路,电路面积1.5 mm×2.3 mm。为了减小驱动轴与检测轴间输出信号相位差,驱动与检测轴电路采用了对称设计。考虑到肖特基二极管的温度特性,本文对该电路的温度特性进行了理论分析,仿真结果证明了理论分析的正确性。肖特基二极管阈值电压随温度改变会直接影响电路增益,降低线性度。测试结果表明,该接口ASIC电路是有效的。
[1]Ran Fang.A Low-Noise High-Linearity Interface ASIC for MEMS Gyroscope[J].Journal of Semiconductors,2013,34(12):125009.
[2]Sharma A,Zaman M F,Ayazi F.A 104-dB Dynamic Range Transimpedance-Based CMOS ASIC for Tuning Fork Microgyroscopes[J].IEEE Journal of Solid-State Circuits,2007,42(8):1790 -1802.
[3]Hongzhi S,Kemiao J,Xuesong L,et al.A CMOS-MEMS Gyroscope Interface Circuit Design with High Gain and Low Temperature Dependence[J].Sensors Journal,IEEE.2011,11(11):2740 -2748.
[4]Zhong Y G,Long T L,Qian C Z,et al.A Lateral-Axis Microelectromechanical Tuning-Fork Gyroscope with Decoupled Comb Drive Operating at Atmospheric Pressure[J].Journal of Microelectromechanical Systems,2010,19(3):458-468.
[5]Lili D,Avanesian D.Drive-Mode Control for Vibrational MEMS Gyroscopes[J].IEEE Transactions on Industrial Electronics,2009,56(4):956-963.
[6]Raman J,Cretu E,Rombouts P,et al.A Closed-Loop Digitally Controlled MEMS Gyroscope with Unconstrained Sigma-Delta Force-Feedback[J].Sensors Journal,IEEE,2009,9(3):297-305.
[7]陈旭光,杨平,陈意.MEMS陀螺仪零位误差分析与处理[J].传感技术学报,2012,25(5):628-632.
[8]王展飞,鲁文高,李峰,等.MEMS振动陀螺闭环自激驱动的理论分析及数值仿真[J].传感技术学报,2008,21(8):1337-1342.
[9]迟晓珠,崔健,闫桂珍.MEMS陀螺振动特性试验技术[J].传感技术学报,2008,21(4):559-562.
[10]Ran Fang.A Low-Noise High-Voltage Interface Circuit for Capcitive MEMS Gyroscope[J].Journal of Circuits,Systems and Computers,2013,22(11):1340019.
[11]Tao Y,Huanming W,Qisong W,et al.A TIA-Based Interface for MEMS Capacitive Gyroscope:ASIC(ASICON),2011 IEEE 9th International Conference on[Z].Xiamen:2011:149-152.
[12]Yaming Z,Ruonan H,Youngwan K,et al.Schottky Diodes in CMOS for Terahertz Circuits and Systems:Radio and Wireless Symposium(RWS),2013 IEEE[Z].Austin,TX:2013:43-45.
[13]Hanson J V,Schlotzhauer K G.A Closer Look at Ring Diode Modulators[J].IEEE Journal of Solid-State Circuits,1972,7(3):253-258.

沈广冲(1988-),男,北京大学信息科学技术学院微电子学与固体电子学硕士研究生,2011年从东南大学电子科学与技术学院获得学士学位,主要研究方向是MEMS陀螺仪接口电路与闭环控制电路研究,sgcseu@163.com;
鲁文高(1978-),男,北京大学副教授,2005年从北京大学信息科学技术学院获得博士学位,主要研究方向为低功耗,低噪声接口ASIC电路与ADC,发表40余篇论文和获得15个专利,wglu@pku.edu.cn。
基于环形肖特基二极管的MEMS陀螺仪接口ASIC电路温度特性分析与设计*
沈广冲1,2,鲁文高2*,刘明星2,李小亮1,2,张雅聪2,陈中建2
(1.北京大学深圳研究生院,广东深圳518055;2.北京大学微米/纳米加工技术国家重点实验室,北京100871)
完成了采用环形二极管结构的MEMS陀螺仪接口ASIC电路设计并且理论分析了环形肖特基二极管的温度特性对电路输出的影响。MEMS陀螺仪系统采用高频载波调制方案,在陀螺仪可动质量块施加1MHz载波,将陀螺仪振动信号调制到载波附近。环形肖特基二极管作为调制解调器,解调陀螺仪输出已调信号得到陀螺仪振动信号。这种方案可以有效放大陀螺仪输出信号。理论和仿真结果表明,肖特基二极管阈值电压随温度的变化会改变电路增益,引入一个正温度系数。采用负温度系数反馈电阻,从而降低电路总的温度系数。ASIC电路基于0.18μm CMOS工艺实现。
ASIC;MEMS陀螺仪;环形肖特基二极管;温度特性
V241.5
A
1004-1699(2014)03-0299-05
2014-01-21修改日期:2014-02-28
C:7630
10.3969/j.issn.1004-1699.2014.03.004
项目来源:国家自然科学基金项目(11305006)
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2018年12期)2018-08-01
百科探秘·航空航天(2017年9期)2017-12-31
电子制作(2017年9期)2017-04-17
电子制作(2017年19期)2017-02-02
山东工业技术(2016年15期)2016-12-01
电子制作(2016年19期)2016-08-24
系统工程与电子技术(2016年7期)2016-08-21
中学科技(2015年10期)2016-01-06
中国舰船研究(2015年2期)2015-02-10

- 传感技术学报的其它文章
- Design and Implementation for Diarrheic Shellfish Poison Detection Based on Electrical Cell-Substrate Impedance Sensing*
- A Design of ECG Signal Monitoring System Based on Intelligent Terminal
- A Study of Multi-Channel sEMG De-Noising and Aliasing Removal*
- Fabrication and Characteration of NiCr-NiSi Thin Film Thermocouples on CFCC-SiC Substrate*
- Fluxgate Magnetometer with Low-Cost and High-Resolution Based on ARM*
- Design and Fabrication of a Ultra Wideband Capacitance MEMS Switch