盾构刀盘驱动多电机同步控制策略研究
2014-09-07 01:27任颖莹周建军王助锋张合沛李宏波
隧道建设(中英文) 2014年12期
任颖莹,周建军,王助锋,张合沛,李宏波
(1.盾构及掘进技术国家重点实验室,河南 郑州 450001;2.中铁隧道集团有限公司,河南 洛阳 471009)
盾构刀盘驱动多电机同步控制策略研究
任颖莹1,2,周建军1,2,王助锋1,2,张合沛1,2,李宏波1,2
(1.盾构及掘进技术国家重点实验室,河南 郑州 450001;2.中铁隧道集团有限公司,河南 洛阳 471009)
为了保障盾构刀盘驱动系统能够稳定运行,刀盘驱动电机之间的同步性能是一个关键因素。针对盾构电机数量多、结构复杂的特点,分析主从控制、并行同步控制和几种耦合控制在盾构驱动电机控制应用中的优缺点,说明并行同步在应用中的合理性;设计一种模糊PID智能控制算法,提出模糊PID控制器与并行同步控制结构相结合的盾构刀盘驱动多电机同步控制策略,应用Matlab/simulink进行建模仿真,对该控制策略和常规的PI控制进行仿真对比。结果证明:所提出的控制策略的动态响应快、实时性能好,在相同的负载突变状况下,该方法具有更强的鲁棒性,能更好地使多电机以设定速度同步运行。
盾构;刀盘驱动;多电机;并行同步控制;模糊PID
0 引言
刀盘系统是土压平衡盾构的一个关键部分,其承担着挖掘切削土体的重大任务;刀盘驱动又是刀盘系统的核心,其控制质量直接决定着盾构掘进的稳定性和可靠性。盾构在掘进过程中,由于地层是不均匀的,且地质状况复杂多变,极易造成驱动电机输出转矩不同步而引起断轴等重大事故。因此,盾构刀盘驱动的多电机同步控制问题,一直是国内外的一个研究热点。
目前对这方面的研究主要集中在控制结构上,史步海等[1]重点分析了主从式同步控制和并行同步控制2种典型控制结构的优劣性;Ran LIU等[2]提出一种闭环控制的环形耦合控制系统,达到自适应均载的目的;张承慧等[3]提出一种基于相邻耦合误差的多电机同步控制策略。这些研究虽然也取得了一定的成效,但在控制算法中利用的仍是PI控制,由于刀盘驱动系统的非线性、大延时等特点,在实际应用中受到了很大限制[4]。
模糊控制特别适应于非线性复杂系统,对控制对象的参数不敏感,可以很好地抑制系统中的干扰和突变。因此,本文先分析目前控制结构的优缺点,找出一种适合的结构与现代控制方法相结合,提出一种适用于多电机传动系统的同步控制算法模糊PID并行同步控制算法,这种控制策略结构简单,在盾构控制中容易实现。仿真结果表明,此控制方法可以提高控制系统的响应速度,可有效缓解负载突变所带来的同步误差。
1 刀盘驱动系统及其特点
盾构的刀盘驱动系统主要包括变频器、电动机、减速器、主轴承及其密封润滑装置等。由图1(主驱动三维)可以看出,盾构主驱动各电机经过各自的减速器与一个和刀盘等直径的大齿轮啮合来驱动整个刀盘[5]。
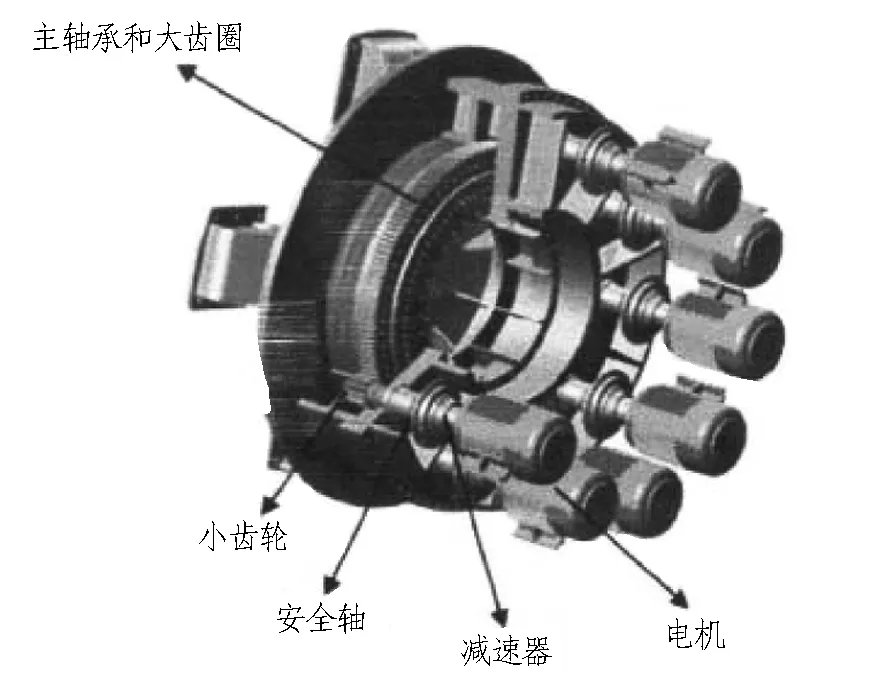
图1 盾构主驱动三维图
与其他需要负载平衡的多电机同步控制相比,盾构刀盘驱动具有很大的特殊性。一是盾构刀盘驱动具有刀盘驱动的电机数量较多;二是机械传动复杂,传动比大,若控制不当,很容易造成传动机构的损坏;三是电机与刀盘齿轮是刚性连接,这种靠机械结构形成的同步,其所承受的扭矩未必是相同的。这些特殊性造成了盾构刀盘驱动同步控制的困难,因此对电机驱动同步控制策略进行研究意义重大。
2 多电机同步控制策略
多电机同步控制结构主要包括并联控制,主从控制2种非耦合控制和一些耦合控制策略[6]。对盾构刀盘同步控制系统的研究主要还是集中在并行同步控制和转矩主从控制策略的研究和改进上。
2.1 主从控制
主从控制的结构如图2所示。在这种情况下,主电机的输出转速值作为从电机的输入转速值。由此可以得出,从电机能够反映并且跟随任何加在主电机上的速度命令或者是从电机的负载扰动。
在这种控制方式中,当主电动机的负载受到扰动时,所有从电动机都会受其影响;但是,当任何一台从电动机的负载发生变化时,其他所有电动机不会受到影响,这样就会造成个别电机不同步。

图2 主从控制结构示意图
2.2 并行同步控制
并行同步控制是基于相同的给定参考输入信号,各电机独立运行的控制模式。其控制系统结构如图3所示。
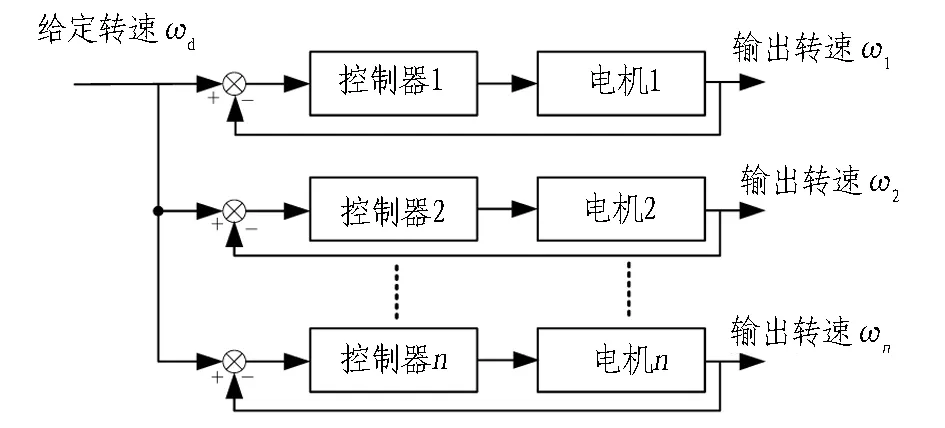
图3 并行同步控制结构示意图
在并行同步控制系统中,各单元获得的输入信号只受参考信号作用,不受任何其他因素的影响,所以任一电机的扰动不会影响任何其他电机的工作。并联运行的同步控制系统优点在于启动、停止阶段系统的同步性能很好,结构简单易实现,不同的单元不受距离的限制,可满足一定条件下的同步要求。
2.3 耦合同步控制
耦合控制方式主要有虚拟总轴控制、交叉耦合控制和偏差耦合控制等。交叉耦合控制原理图如图4所示。与非耦合控制相比,交叉耦合控制主要的特点就是将2台电机的速度信号进行比较,从而得到一个差值作为附加的反馈信号,再将这个反馈信号作为跟踪补偿信号,使系统能够接受任何一台电机的负载变化,从而获得良好的同步控制精度。但这种控制方式对于超过3台电动机的同步控制中不适合,因此盾构中一般不采用此方法。另外,由于耦合系数选择的好坏对同步性能的影响至关重要,而在实际应用中,很难将耦合系数调整到最佳值。另外2种是交叉耦合的发展延伸,同样存在上述缺点。
2.4 控制方式的选择
通过以上分析可知,由于刀盘驱动电机数量较多,采用耦合控制会很复杂实现起来会很麻烦[7]。主从控制从理论上来说可以满足同步及力矩平衡的要求,但是在实现这种控制方式过程中存在一个通信实时性的问题,即主变频器与从变频器信号传输的实时性,因为主变频器的力矩信号由变频器的信号给定,当遇到负载波动比较大的情况时,信号传输过程的延时,将会导致主从之间出力不均衡,此时通信的实时性直接影响到整个系统稳定运行。
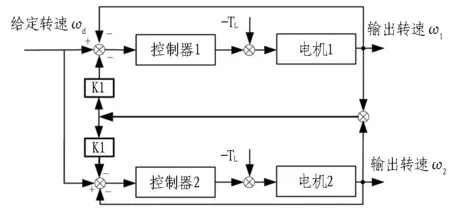
图4 交叉耦合控制结构示意图
并行同步控制有其突出的优点,每台变频器对应控制一台电机,各变频器之间无需联系,其特点是系统结构简单,易实现,控制的关键是要求电机的负载差异小,即各电机的机械特性保持一致,从而达到多个电机负载平衡。根据并行控制的原理,只要保证各个电机的速度一致,则各个电机所输出的力矩就可保持平衡,所以在控制中只要保证速度一致即可。基于综合考虑本系统采用并行同步控制策略,为了使控制性能更加完善,下面对控制算法进行研究。
3 模糊PID在多电机同步驱动中的应用
3.1 控制器的设计
PID控制具有原理简单、易于实现、适用面广的特点,但由于多电机同步控制系统具是一个多变量、高耦合、非线性的系统,一组整定好的PID参数不能很好地满足控制的要求[8-9];而模糊控制由于其控制规则总结了工程技术人员的经验知识,不需要控制对象具有精确的数学模型就可以使得控制系统具有很好地鲁棒性[10]。结合两者的特性,本文采用了模糊PID控制算法。如图5所示,以速度的误差e及误差变化率ec作为控制器的输入,基本论域分别为[-180,180]、[-150,150]。输出用来对PID的参数进行调整,为了避免参数分档造成的阶梯变化,一般输出只是作为一个修正值,即根据输入计算出的ΔKP,ΔKI,ΔKD,这样可以实现PID参数的在线自整定,这样可以快速减小同步误差,从而达到比较好的控制效果,其基本论域分别为[-3,3]、 [-0.06,0.06]、 [-3,3]。KP0,KI0,KD0为控制参数的初值,由用户设定,这样用户可以对参数进行宏观调控,可以弥补模糊推理所造成的误差,更好地增强系统的鲁棒性。

图5 模糊PID控制结构图
根据专家经验,在本设计中,将2个输入e和ec的绝对值,3个输出ΔKP,ΔKI,ΔKD模糊子集进行常规的划分,即负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)和正大(PB)。将e,ec,ΔKP,ΔKI,ΔKD的基本论域定义为模糊集上的模糊论域:e,ec={-5,-4,-3,-2,-1,0,1,2,3,4,5};ΔKP,ΔKI,ΔKD={-5,-4,-3,-2,-1,0,1,2,3,4,5}。输入模糊变量|e|,|ec|和输出变量ΔKP,ΔKI,ΔKD隶属度函数均采用对称三角形隶属函数。
3.2 模糊PID控制器控制规则
模糊PID控制算法中最重要的一步就是对PID参数进行自整定,关键是找出ΔKP,ΔKI,ΔKD和偏差及偏差变化率之间的关系,即模糊规则表,根据对以往工程实际操作经验的总结,制定出合理的模糊规则表。当|e|较大时,为了使系统具有较好的跟随性能,应取较大的KP和较小的KD,为了避免出现超调现象,KI最好为零;当|e|和|ec|适中时,为使系统具有较小的超调量,KP应取小值,取值始终,KD的取值对系统的影响较大,为保证系统的响应速度,取值也要大小适中;当|e|较小时,为使系统有良好的稳态性能,KP和KI的取值应该增大,KD的取值与|ec|的大小关系很大,当|ec|较小时,取值要大一点,当|ec|较大时,取值应小一点,目的是为了避免系统在设定值附近出现振荡,提高其抗干扰性能。根据上面分析和实践经验,制定出ΔKP,ΔKI,ΔKD的模糊规则表,如表1—3所示。

表1 ΔKP的模糊规则表Table 1 Fuzzy rules of ΔKP

表2 ΔKI的模糊规则表Table 2 Fuzzy rules of ΔKI

表3 ΔKD的模糊规则表Table 3 Fuzzy rules of ΔKD
本文采用重心法解模糊输出,根据|e|和|ec|的变化,得到ΔKP,ΔKI,ΔKD的值,经过式(1)计算得到PID控制器的参数KP,KI,KD。
(1)
4 仿真
本文对多电机同步驱动仿真利用matlab中的simulink模块仿真软件,一个电机对应着一个模糊控制器,在实际应用中,可以根据电机的性能对模糊PID控制的初始参数和模糊规则进行相应的调整。
电机选择额定电压380 V,额定频率50 Hz,额定功率110 kW,极对数为2对的三相异步电动机模型,Tm用于输入机械转矩,电动机负载由常数模块TL设定,输出端m用于连接电机测量单元Machines Demux,输出电机的参数。电机运行在速度模式,通过先进的矢量控制实现高精确的速度控制。矢量控制通过速度给定计算得到力矩给定,经过相关坐标转换运算获取控制逆变器的开关信号plues控制逆变器晶闸管的通断,从而使直流电变成频率可调的交流电,控制电机的运行。在实际盾构中,电机驱动中采用的变频器为无速度矢量变频器,但模型仿真中要依靠电机检测信号反馈形成闭环回路,因而采用的是带速度反馈的矢量控制,试验中变频器仿真模块为了简单省去了整流环节,直接利用了直流电源,通过逆变器来实现电压的调整。单电机模糊PID控制的仿真模型如图6所示。
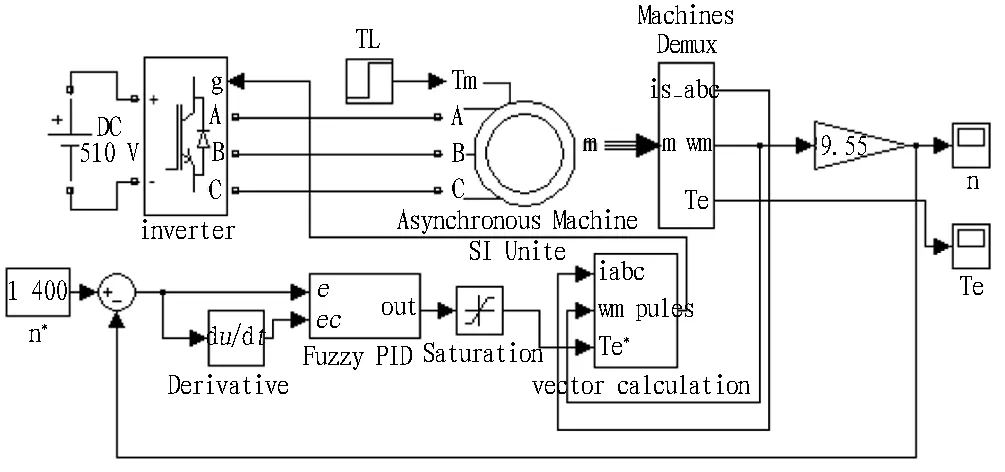
图6 单电机模糊PID控制仿真模型
以下实验的电机都运行在速度控制模式,根据实际盾构中驱动电机的运行状况,为了简化实验,仿真中电机的速度都设定在1 400 r/min,通过控制器来控制电机的速度达到设定值。
本文首先对单电机利用模糊PID控制和PI控制算法在启动和负载突变状况下的响应进行仿真对比,然后把模糊PID控制与并行同步控制结合起来利用4台电机对多电机的同步性进行仿真,证明所设计的控制方法的实用性。
4.1 单电机启动对比
在电机启动时加一定的负载,模糊PID控制电机的启动过程如图7所示。在刚启动阶段有短时间的反向速度,这是仿真时的力矩补偿造成的,但总体来看速度响应非常迅速,在0.4 s左右可达到设定值。PI启动如图8所示,其响应时间要比模糊PID控制的时间长,0.45 s达到设定值,但由于存在着超调和波动,完全跟踪需要1 s左右。
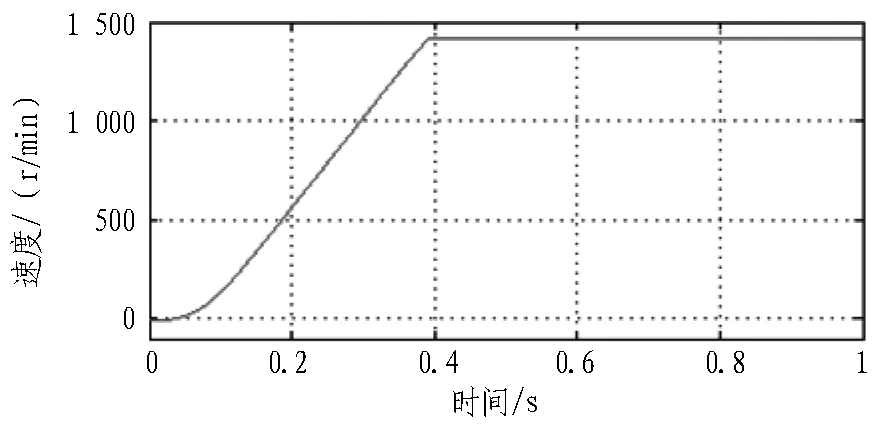
图7 模糊PID控制的速度响应曲线
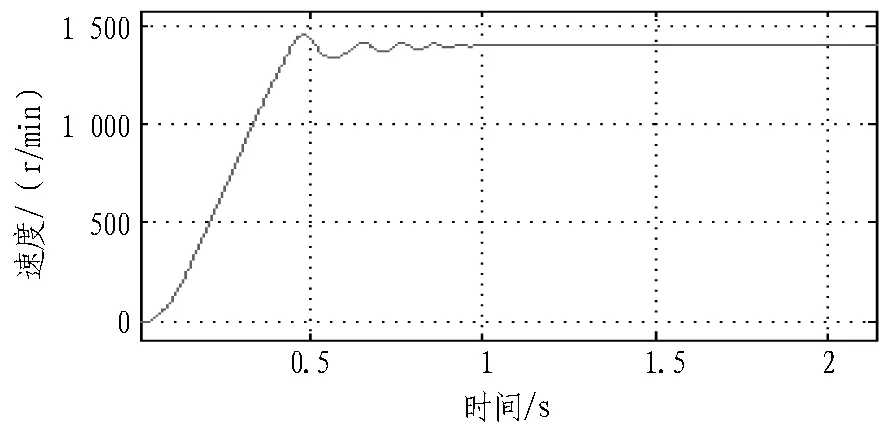
图8 PI控制的速度响应曲线
4.2 单电机载荷扰动对比
盾构在掘进中,由于地层不均匀会导致电机所承担的负载突变,通过改变电机所加的负载大小来进行模拟,载荷变化率为100%。模糊PID在1 s时使负载突变,速度的波动如图9所示,波动范围为10 r/min,并且能够很快恢复到设定速度;PI控制的仿真在2 s时使负载突变,出现的波动如图10所示,波动程度比模糊PID控制剧烈,波动时间也较长。

图9 负载突变状况下模糊PID控制的响应曲线Fig.9 Curve of speed response of PID control under load mutation condition

图10 负载突变状况下PI控制的响应曲线Fig.10 Curve of speed response of PI control under load mutation condition
4.3 多电机启动
多电机的模糊PID控制的仿真,利用4个如图6所示的单电机模型通过并行同步控制组合在一起,速度同一给定,观察4台电机的转速变化情况。首先对4台电机的启动阶段进行仿真,在启动过程中,由于土层的不均匀等原因,每个电机承担的负载可能会有所不同,所以在仿真时给电机加上不同的负载进行模拟。另外,实际中电机的参数会有些差异,在仿真时通过调整电机的定子、转子的电阻、电感值来使电机性能略有不同。启动阶段4台电机的速度响应如图11所示,4台电机的速度响应很快,其速度也基本相同。图12为局部放大图,电机1所施加的负载相对较小,依次类推,电机4施加的负载最大,因此其启动速度略有不同。
4.4 多电机载荷扰动
对于盾构掘进过程中负载的不确定性,在1 s时使负载突变,载荷变化率为100%,由图13显示4台电机的速度均发生微小的反弹现象,但很快稳定在1 400 r/min左右,可以看出模糊PID控制具有较强的鲁棒性,对于负载的突变具有较强的抑制作用。

图11 多电机启动速度响应Fig.11 Curve of speed response under multi-motors starting condition
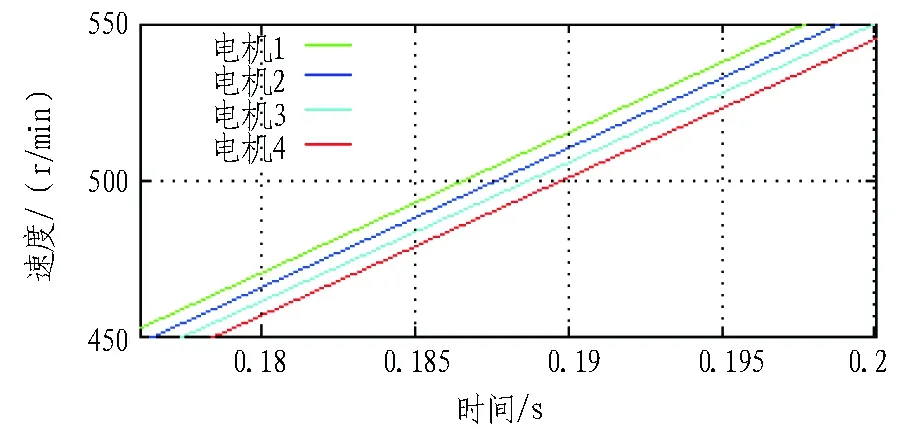
图12 局部速度响应曲线

图13 负载突变时4台电机的速度响应Fig.13 Speed response of 4 motors under load mutation condition
4.5 仿真结果分析
从单电机的仿真可以看出模糊PID控制在启动中响应速度比PI控制稍快一点,最重要的是没有超调,而PI控制出现超调,且波动时间很长。在负载突变仿真中,负载的变化对模糊PID控制的影响较小,只有一个波动就可稳定在给定速度,而PI控制振荡比较明显。所以模糊PID控制的性能要好一些。
在多电机的仿真中,模糊PID控制与并行同步控制方式相结合,可以看出随着电机数量的增加,这种控制方法对电机的性能没有太大影响,启动的响应时间和单电机基本一致,在遇到负载突变状况时,电机的速度发生变化后,经过短时间调整,很快恢复到设定值,几台电机之间的速度同步误差比较小。只要电机的速度一致则它们所承担的负载就是相同的,可以有效避免个别电机过载所造成的故障。综上所述,本文所设计的控制策略对于外界的扰动具有较强的抑制能力,同步性能大幅度提高,顺应载荷波动的能力增强。
5 结论与讨论
本文针对盾构控制电机数量多、结构复杂,刀盘电机同步性能难以保障的特点,对盾构的控制系统进行分析研究。首先研究了主从控制、并行同步控制和几种耦合控制在盾构驱动电机控制应用的特点,得出了在盾构控制中采用并行同步控制的合理性。然后设计了一种基于模糊PID智能盾构控制算法,并将该算法和并行同步控制进行结合。最后通过实验仿真将该方法与常用的PI控制方法对比,发现该方法可以有效提高多电机的响应速度,减少同步误差,效果明显,并且其控制的同步性能和抗负载扰动的性能更佳。本文研究的控制策略在实验研究阶段取得了良好的效果,在后续研究中可以考虑利用在盾构施工控制中,这对保障盾构施工的安全及准确控制具有重要的意义。
[1]史步海,李伟青.盾构机刀盘驱动系统同步控制技术的研究[J].计算机测量与控制,2012,20(5): 1258-1260.(SHI Buhai,LI Weiqing.Research on synchronous control of tunnel boring machine’s cutter head driving system[J].Computer Measurement & Control,2012,20(5): 1258-1260.(in Chinese))
[2]Ran LIU,Weidong LI,Jianzhong SUN,et al.Load sharing performance of the main drive system in the shield machine and improvement of control method[J].Journal of Mechanics Engineering and Automation,2012,2(9): 10-15.
[3]张承慧,石庆升,程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报,2007,27(15): 59-63.(ZHANG Chenghui,SHI Qingsheng,CHENG Jin.
Synchronization control strategy in multi-motor systems based on the adjacent coupling error[J].Proceedings of the CSEE,2007,27(15): 59-63.(in Chinese))
[4]Xiao Y,Zhu K Y.Optimal synchronization control of high-precision motion systems[J].Industrial Electronics,IEEE Transactions,2006(4): 1160-1169.
[5]罗亚琴.盾构机刀盘系统的同步驱动研究[D],大连:大连理工大学机械工程学院,2011.(LUO Yaqin.Study on synchronization driving of cutter head of shield machine[D].Dalian: School of Mechanical Engineering,Dalian University of Technology,2011.(in Chinese))
[6]赵刚,刘德全.盾构机刀盘多电机同步驱动研究[J].广东造船,2012(6): 73-77.(ZHAO Gang,LIU Dequan.Synchronously research of the shield machine cutter drive[J].Guangdong Shipbuilding,2012(6): 73-77.(in Chinese))
[7]连继军.基于模糊PID控制的多电机同步控制系统的分析与设计[J].煤矿机械,2014,35(3): 210-212.(LIAN Jijun.Analysis and design of multi-motor synchronous control system based on fuzzy PID control[J].Coal Mine Machinery,2014,35(3): 210-212.(in Chinese))
[8]Skoczowski S,Doraek S,Pietrusewicz K.Robust PID model following control[J].Control and Intelligent Systems,2006(3): 186-193.
[9]崔皆凡,邢丰,赵楠,等.基于模糊控制器的改进耦合多电机同步控制[J].微电机,2011(3): 75-77.(CUI Jiefan,XING Feng,ZHAO Nan,et al.The improved coupling multi-motor synchronous control based on fuzzy controller[J].Micromotors,2011(3): 75-77.(in Chinese))
[10]Jones M,Levi E,Iqbal A.Vector control of a five-phase series-connected two-motor drive using synchronous current controllers[J].Electric Power Components and Systems,2005,33(4): 411-430.
广告目次
中铁隧道集团有限公司承建的渝黔铁路天坪隧道 封面
常州金土木工程仪器有限公司 封二
西安交大流体压缩国家工程中心咸阳风机厂 插一
中铁岩锋成都科技有限公司 插二
罗宾斯(上海)地下工程设备有限公司 后插二
《隧道建设》 后插一
《隧道建设》 封三
阿特拉斯·科普柯(上海)贸易有限公司 封底
StudyonSynchronousControlTechnologiesforCutterHeadDrivingMotorsofShield
REN Yingying1,2,ZHOU Jianjun1,2,WANG Zhufeng1,2,ZHANG Hepei1,2,LI Hongbo1,2
(1.StateKeyLaboratoryofShieldMachineandBoringTechnology,Zhenzhou450001,Henan,China; 2.ChinaRailwayTunnelGroupCo.,Ltd.,Luoyang471009,Henan,China)
The synchronous performance of the cutter head driving motors of shield is the key to the normal operation of the cutter head drive system of shield.In this paper,the advantages and disadvantages of master-slave control,parallel synchronous control and coupling control of driving motors of shield are analyzed,and the rationality of parallel synchronous control is demonstrated.A multi-motor synchronous control method based on fuzzy PID controller and parallel synchronous control structure is proposed and simulated by means of Matlab/simulink module,and comparison and contrast is made between the mentioned control method and PI control.The study shows that the mentioned control method is superior to PI control in terms of dynamic response,real-time performance and robustness,and it can achieve better synchronous working of the motors at the set speed.
shield; cutter head drive; multi-motor; parallel synchronous control; fuzzy PID control
2014-07-11;
2014-08-20
国家863计划项目(2012AA041802);国家国际科技合作专项(2011DFB71550);中铁隧道集团重大课题(隧研合2013-10)
任颖莹(1985—),女,河南南阳人,2013年毕业于郑州大学,控制理论与控制工程专业,硕士,助理工程师,现主要从事盾构及掘进技术研究工作。
10.3973/j.issn.1672-741X.2014.12.013
U 455.3+9
A
1672-741X(2014)12-1196-06
猜你喜欢
中国水利水电科学研究院学报(2018年3期)2018-07-20
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年2期)2017-05-04
浙江大学学报(工学版)(2016年11期)2016-06-05
电源技术(2015年9期)2015-06-05
西安交通大学学报(2015年3期)2015-03-14
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
电测与仪表(2014年14期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01