
Sensor Fault Diagnosis of the Automobile Active Noise Control System Based on SVM and RBFN*
2014-09-07 11:24:46SAIJierhuDAIShengfangDONGAihuaMAIOQingying
传感技术学报 2014年4期
SAI Jierhu,DAI Shengfang,DONG Aihua,MAIO Qingying
(College of Information Sciences and Technology,Donghua University,Shanghai 201620,China)
Sensor Fault Diagnosis of the Automobile Active Noise Control System Based on SVM and RBFN*
SAI Jierhu,DAI Shengfang,DONG Aihua*,MAIO Qingying
(College of Information Sciences and Technology,Donghua University,Shanghai 201620,China)
The normal operation of the automobile active noise control system depends on multiple sensors.Once there is any sensor failure,it will severely affect the noise reduction effect.In order to guarantee the automobile active noise control system’s performance,a sensor fault diagnosis system based on support vector machines(SVM)and radial basis function networks(RBFN)is put forward.The SVM model monitors sensor fault,meanwhile the RBFN models locate the fault sensor and reconstruct its signal based on the information redundancy between each sensor.Simulation results prove that the proposed diagnosis system could effectively diagnose any sensor fault in the automobile active noise control system as well as reconstruct fault sensor’s signal.Compared to the conventional automobile active noise control system,introducing the proposed diagnosis system provides higher reliability of noise reduction.Key words:fault diagnosis;signal prediction;support vector machines;radial basis function networks;signal reconstruction;automobile active noise control
随着人们对汽车舒适性要求的日益提高,噪声特性已成为衡量乘用车舒适性的重要指标。主动降噪技术是当今汽车消噪技术的新趋势。为了获取噪声特性,需在噪声源及驾驶室内安装相关的噪声检测传感器。这些传感器一旦发生故障,可能会引起控制声源的误响应而加剧噪声。因此,对汽车主动降噪系统中关键位置的传感器进行一定的故障检测及信号重构,是保证主动降噪系统消噪性能的重要措施。
在传感器故障诊断方法中,基于冗余技术的诊断方法应用最为广泛。文献[1]利用BP神经网络逼近各传感器间的冗余关系来进行传感器的故障诊断,文献[2]则提出了一种基于两级BP神经网络的传感器故障诊断方法,并将其应用于水下航行器的主动容错控制技术中。利用BP神经网络的非线性学习能力,通过预测传感器信号的输出,能在一定程度上实现传感器的故障诊断,但当学习样本数较少时,由于不能保证预测精度,往往难以取得最佳的诊断效果。文献[3-5]研究了基于支持向量机的传感器故障诊断方法,虽然解决了小样本学习问题,但当学习样本之间具有复杂的相关关系时,支持向量机模型往往难以体现这种复杂关系。
通过对现有的文献研究发现,支持向量机与神经网络相比,具有更强的泛化能力和对小样本的学习能力[6-7],而神经网络则具有更强的实时计算能力和对复杂关系的逼近能力。本文结合SVM与RBF神经网络各自的特性,基于主、从结构的思想,利用SVM精确的预测性能进行故障检测,同时利用神经网络良好的逼近能力进行冗余关系的逼近,实现故障定位与信号重构。
1 汽车主动降噪系统的构成
主动噪声控制ANC(Active Noise Control),也称主动降噪技术,主要是利用声波的相消性干涉原理,人为发出与噪声源(初级声源)同频率、同幅值、反相位的控制声源(次级声源)与噪声源相干涉,从而实现降噪的目的[8]。根据结构原理的不同,目前主动降噪系统主要有前馈式、反馈式和混合式3种,其中前馈式应用最为广泛。前馈式主动降噪系统[9]的构成如图1所示。

图1 前馈式主动降噪系统示意图
参考传感器用于获取原始噪声信号。汽车的主要噪声源包括发动机噪声、底盘噪声(即传动系噪声)、车身噪声等,其中发动机噪声占50%以上,包括燃烧噪声、进排气噪声等[10]。因此,参考传感器一般安装在发动机表面、排气管、底盘、车身等多个位置。由于各机械机构之间的联动作用,各参考传感器之间存在一定的信息冗余关系。误差传感器则用于获取驾驶室内部的残余噪声信号,一般安装在驾驶员汽车座椅枕头上或驾驶员与副驾驶两座位中间。
对主动降噪系统而言,只有各参考传感器和误差传感器正常工作,才能获得正确的初级噪声数据与降噪反馈数据,从而保证降噪效果。一旦系统中某传感器故障,将无法给ANC控制器传递准确的测量信号,会导致主动降噪系统工作异常,甚至加剧噪声。
2 传感器故障诊断系统的结构
本文所设计的传感器故障诊断系统,由一个支持向量机SVM(Support Vector Machines)预测模型和L个(L为参考传感器个数)径向基神经网络RBFN(Radial Basis Function Networks)预测模型组成,针对单个传感器故障,实现故障监测、定位及信号重构。SVM预测误差传感器的输出,并与其实际输出相比较来监测系统中是否发生传感器故障;各RBFN则通过逼近各参考传感器间的冗余关系来预测各参考传感器的输出。一旦SVM监测到系统中发生了传感器故障,则将各RBFN的预测输出与对应参考传感器的实际输出相比较,定位出故障传感器,并用对应RBFN的预测输出代替其实际输出,实现故障传感器的信号重构。
2.1 SVM预测模型
SVM采用结构风险最小化原则,泛化能力较强。用SVM建立误差传感器的预测模型,实际是利用其回归学习的能力,拟合误差传感器输出序列的预测函数f(x)[11]:

其中,xi表示i时刻误差传感器的输出。样本数据集按照表1所示的方式建立。

表1 SVM模型的训练样本
用xi表示输入样本,yi表示输出样本,根据SVM理论,将样本数据集{xi,yi}(i=1,2,…,N;xi∈Rk,yi∈R)通过一个非线性映射φ映射到高维特征空间,并在此空间构造线性回归函数[12]:

这里,w=[w1,w2,…,wN]为确定映射φ的权值向量,b为偏置值。对w和b的求解可归结为如下的凸二次规划问题:

其中,目标函数的第1项使得回归函数最为平坦,优化这一部分能提高泛化能力;常数c>0,为惩罚系数,表示对超出误差ε样本的惩罚程度;λi、λ*i为所引入的松弛变量,表示允许一定的拟合误差。
此规划问题的Lagrange对偶问题为:


其中,ai、是Lagrange因子,内积运算φ(xi)· φ(xj)可用满足Mercer条件的核函数,如线性函数K(xi,xj)=xi·xj、多项式函数K(xi,xj)=(xi·xj+ 1)d、径向基函数代替。在缺乏先验知识时,用径向基核函数训练的SVM模型具有较好的总体性能[13]。
求解上述对偶问题,可得回归函数为:

SV为支持向量集,此函数即所需的预测函数f(x)。
2.2 径向基神经网络模型
RBFN是一个局部逼近网络,与BP等其他神经网络相比,预测精度更高,学习速度更快[14],因此本文采用RBFN逼近各传感器之间的冗余关系。
每个网络均3层,输入层(L-1)·p个节点,输出层1个节点。其中l#RBFN的输入为除l#参考传感器外其余L-1个参考传感器从时刻t-p到时刻t-1的实际输出,输出则为l#参考传感器在时刻t的预测值。以1#RBFN为例,其结构如图2所示。

图21 #传感器的RBFN模型
经过一定的训练后,1#RBFN可以掌握其余参考传感器与1#传感器之间的信息冗余关系,此后若1#参考传感器出现故障,而2#-n#参考传感器正常,就可用1#RBFN的输出代替1#参考传感器的输出参与控制。
RBFN的输入层和输出层激活函数均为线性函数,隐层的激活函数φ则为高斯径向基函数:

r表示输入向量,Gj表示第j个隐层神经元的输出; σj是第j个隐层神经元基函数围绕中心点的宽度;cj∈Rk表示第j个隐层神经元的基函数中心;‖·‖是向量的欧氏范数,用于表示距离。高斯函数能对靠近函数中心的输入产生较大的输出,因此RBFN具有局部逼近能力。
输出层的线性激活函数使得该层输入到输出直通,因而k时刻网络的输出为:

以x(k)表示k时刻对应参考传感器的实际输出,可定义学习误差函数为:

对RBFN的训练,采用随机法选择初始中心向量c、初始函数宽度σ和初始连接权值w,并按照梯度下降法,对中心向量、函数宽度及连接权值一起采用监督训练:
(1)隐层到输出层的连接权值w更新:

(2)隐层中心向量c调整:

(3)隐层函数宽度σ调整:

这里,j=1,2,…,m,η1、η2、η3为学习率。各RBFN同样利用对应参考传感器正常工作时的输出来训练,训练完成后,利用当前更新的数据列不断进行在线学习。
3 故障诊断与信号重构的实现过程
当汽车主动降噪系统正常工作时,SVM与RBFN的预测值与对应传感器的实际输出值之间误差应很小。设SVM的误差阈值为δSVM,各RBFN的误差阈值为δRBF,则传感器故障诊断与信号重构的实现过程为:
(1)故障监测过程
以误差传感器当前时刻t前的k个输出xt-k,xt-k+1,…,xt-1作为SVM模型的输入,预测第k+1个输出^xt,并与误差传感器的实际输出xt比较,得到误差δ:
①δ≤δSVM,无传感器故障,以xt-k,xt-k+1,…,xt-1进行新一的预测,依此类推;
②δ>δSVM,发生传感器故障,进行故障定位与信号重构。
(2)故障定位与信号重构过程
在SVM监测故障的同时,各RBFN也进行在线学习。设各RBFN的预测输出与对应参考传感器的实际输出之间的误差为δl(l=1,2,…,L):
①δl≤δRBF,l#参考传感器未故障,l#RBFN继续进行在线学习;
②δl>δRBF,l#参考传感器发生故障,则将l# RBFN的输出代替l#参考传感器的实际输出,重构其信号;此时l#RBFN由于失去学习目标而已无法在线学习,故障排除后才重新开始在线学习;
③若对l=1,2,…,L均满足δl≤δRBF,故障可能发生在误差传感器上,为进一步排除控制信号本身造成的误差,判断连续几个采样周期内SVM的预测误差,若均满足δ>δSVM且δl≤δRBFl=1,2,…,L,证明误差传感器发生故障。
误差传感器发生故障时,SVM模型失去学习目标,故障监测系统将不能运作,此时需立刻提示更换故障传感器,以保证主动降噪系统及其故障诊断系统的正常运行。由于误差传感器安装于驾驶室内部的明显位置,一方面其所处环境良好,发生故障的可能性较小,另一方面更换也十分方便。
4 仿真研究
仿真平台为MATLAB2010b。取发动机表面噪声传感器(1#)、排气噪声传感器(2#)及车身噪声传感器(3#)作为参考传感器。根据各噪声源的频段分布[15-16],发动机表面噪声频段约900 Hz~2 000 Hz,排气噪声频段约200 Hz~1 000 Hz,车身噪声频段约5 Hz~300 Hz。由于发动机表面噪声与排气噪声直接取决于发动机的振动频率,认为发动机表面噪声与排气噪声近似线性相关;车身噪声一般取决于车速与路面平坦程度[16],而车速又与发动机的振动频率密切相关,因此认为发动机噪声与排气噪声对车身噪声也具有近似线性作用。为模拟这3种噪声信号,首先利用一个高斯白噪声序列通过一个带宽900 Hz~2 000 Hz的Butterworth带通滤波器来模拟发动机表面噪声;用这组序列生成一组与之线性相关的序列,经带宽200 Hz~1 000 Hz的滤波器来模拟排气噪声;将前两组序列线性组合后叠加一个服从正态分布的随机信号(模拟路面平坦程度对车身噪声的影响),经带宽5 Hz~300 Hz的滤波器来模拟车身噪声。
驾驶室内部的噪声是各噪声源消噪后的残余噪声,可用上述3组噪声降幅后(降为原幅值的1/10)的序列相叠加来模拟。
4.1 各模型的预测性能
设置输入样本维数k=10,取模拟误差噪声的前400组数据进行SVM模型训练。通过调整惩罚系数c与径向基核函数宽度σ不断改善模型的预测效果,最终取c=2,σ=1.1,能得到较高的预测精度。训练完成后,再取后200组数据进行在线学习,可得到SVM模型在系统无传感器故障时的预测性能如图3所示。
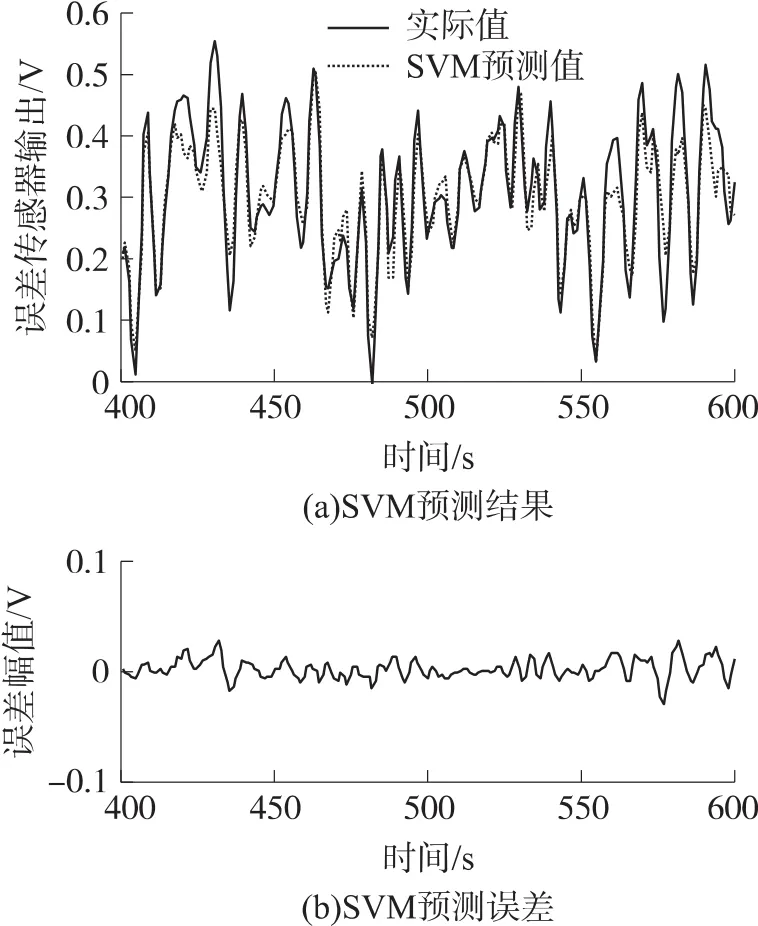
图3SVM模型的预测效果
3个参考传感器对应3个RBFN,时间序列长度p取10,学习速率η1=η2=η3=1,网络的搭建利用newrb()函数自动完成。按照图2所示结构,分别取对应噪声序列的前400组数据作为对应网络的训练输入/输出,3个网络均训练完成后,再取对应信号的后200组数据进行在线学习。3个RBFN在无传感器故障时的预测性能如图4所示。
另外,为说明RBFN对逼近冗余关系的优势,以1#RBFN为例,与同样结构的SVM的预测效果进行了对比,结果如图5所示。
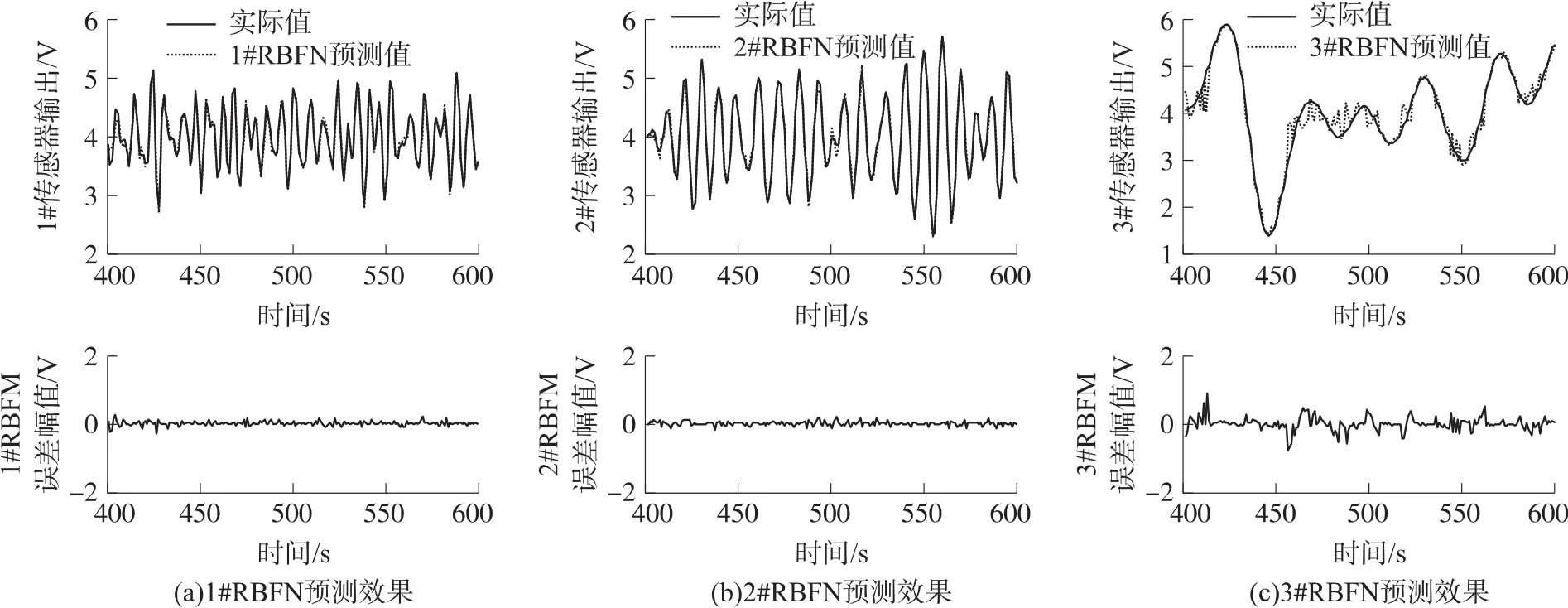
图41 #~3#RBFN的预测效果

图5SVM和RBFN对1#传感器的预测效果比较
由图3~图5可见,正常情况下,各预测模型的输出与对应传感器的实际输出近乎重合,证明用预测输出来表示传感器实际输出是可靠的。由于SVM对误差传感器进行预测时精度较高,但对参考传感器进行预测时,预测精度比RBFN差很多。因此在设计检测系统时,对参考传感器用RBFN进行预测,以保证预测精度;而对误差传感器则用SVM进行预测,以降低运算的耗时。
4.2 故障检测与信号重构
取δSVM=0.08 V,δRBF=1.0 V。假设在600 s时1#传感器发生偏置故障,偏置量为1.5 V,此时SVM预测模型的预测误差将变大。处理器一旦检测到SVM的预测误差超过δSVM,将立刻判断3个RBFN的输出误差。图6展示了1#RBFN的误差变化,可以看到,从600 s之后1#传感器的实际输出偏离了正常情况下的输出趋势,但1#RBFN的预测输出仍接近正常情况下的信号,从而导致预测误差从600 s之后变大,并超过设定的阈值δRBF。此时处理器判断1#RBFN传感器发生故障,将1#传感器的输出切换为1#RBFN的预测输出,实现故障传感器的信号重构。

图61#传感器故障时1#RBFN的预测误差变化
图7 展示了SVM模型的预测误差变化情况,600 s时,由于1#传感器发生偏置故障,SVM模型的预测误差增大至超过阈值;当对故障传感器的信号进行重构后,SVM的预测误差又回到小于阈值的情况。由图可见,从发生故障到定位故障传感器,再到故障传感器的信号重构,整个过程耗时极短。

图7 信号重构前后SVM预测误差的变化
5 结束语
本文采用SVM预测模型与RBF神经网络预测模型构成的传感器故障诊断系统,实现了汽车主动降噪系统的主动容错控制。仿真结果表明,本文所设计的传感器故障诊断方法可有效实现汽车主动降噪系统的传感器故障诊断及信号重构,从而在一定程度上实现汽车主动降噪系统的容错控制,即使系统中的某些传感器发生故障,也能保证主动降噪系统的降噪性能。
[1]雷云涛.基于神经网络和冗余技术的传感器检测系统[J].电力系统及其自动化学报,2013,25(3):158-161.
[2]高立娥,刘卫东,张萍,等.基于两级神经网络传感器故障诊断与容错控制技术[J].鱼雷技术,2008,16(6):34-37.
[3]李业波,李秋红,黄向华,等.航空发动机传感器故障与部件故障诊断技术[J].北京航空航天大学学报,2013,39(9):1174-1180.
[4]吴坚,赵阳,何睿.基于支持向量机回归算法的电子机械制动传感器系统故障诊断[J].吉林大学学报(工学版),2013,43 (5):1178-1183.
[5]冯志刚,张学娟.基于LS-SVM和SVM的气动执行器故障诊断方法[J].传感技术学报,2013,26(11):1610-1616.
[6]王丽杨,刘治,赵之光,等.一种小样本支持向量机控制器在两足机器人步态控制的研究[J].控制理论与应用,2011,28(8): 1133-1144.
[7]刘东,葛运建.基于SVM预测器的传感器故障诊断与信号恢复研究[J].传感技术学报,2005,18(2):248-253.
[8]Jiang J G,Wang D F,Zeng Y,et al.Active Control of Vehicle Interior Noise Based on Selective Attenuation method[C]//2009 2nd International Conference on Information and Computing Science,ICIC.2009,3:157-160.
[9]陈道炯,马瑞,单世宝,等.车内多通道自适应主动降噪的研究[J].汽车工程,2007,29(4):300-303.
[10]陈超,刘颖.汽车噪声的分析与控制[J].黑龙江交通科技,2007,12:111-113.
[11]Xie J H.Time Series Prediction Based on Recurrent LS-SVM with Mixed Kernel[J].2009 Asia Pacific Conference on Information Processing,APCIP 2009,1:113-116.
[12]Liu B,Su H Y,Huang W H,et al.Temperature Prediction Control Based on Least Squares Support Vector Machines[J].Control Theory and Applications,2004(4):365-370.
[13]刘威.基于支持向量机的城市空气质量时间序列预测模型探究[J].电子测试,2013,20:44-46.
[14]罗新,牛海清,林浩然,等.BP和RBF神经网络在气隙击穿电压预测中的应用和对比研究[J].电工电能新技术,2013,41 (4):66-69.
[15]党媚.基于小波分析的汽车噪声源识别[J].中国新通信,2010:62-64.
[16]贾春来,于光.浅谈汽车噪声的主要因素及改进措施[J].2008,11:99-100.

赛吉尔呼(1988-),男,硕士研究生,研究方向为检测与自动化装置,信号处理,tecsai@163.com;

戴盛芳(1989-),女,硕士研究生,研究方向为智能系统,计算机控制,daidai_dsf@126.com;

董爱华(1970-),女,副教授,硕士生导师,研究方向为检测与自动化装置,dongaihua@dhu.edu.cn;

苗清影(1976-),女,高级工程师,上海交通大学继续教育学院,研究方向为复杂网络同步与控制,多层网络建模与动力学研究。
基于SVM和RBFN的汽车主动降噪系统传感器故障诊断*
赛吉尔呼,戴盛芳,董爱华*,苗清影
(东华大学信息科学与技术学院,上海201620)
汽车主动降噪系统的工作依赖于多个噪声传感器,一旦传感器发生故障,将严重影响降噪效果。为保证汽车主动降噪系统的性能,提出了由支持向量机(SVM)预测模型和径向基神经网络(RBFN)预测模型构成的传感器故障诊断系统,SVM模型判断是否发生传感器故障,RBFN模型则利用各传感器间的信息冗余关系定位故障传感器并对其信号进行重构。仿真结果表明,该诊断系统可有效实现汽车主动降噪系统中的传感器故障诊断及信号重构。与传统的汽车主动降噪系统相比,引入传感器故障诊断系统可保证更稳定的降噪性能。
故障诊断;信号预测;支持向量机;径向基神经网络;信号重构;汽车主动降噪系统
TP277;TP206
A
1004-1699(2014)04-0512-06
2013-12-25修改日期:2014-03-29
C:7230;7210 B;1295
10.3969/j.issn.1004-1699.2014.04.017
项目来源:国家自然科学基金青年基金项目(61304158)
猜你喜欢
摄影世界(2022年1期)2022-01-21 10:50:14
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
商周刊(2017年6期)2017-08-22 03:42:36
山东大学法律评论(2016年0期)2016-08-16 03:24:12
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
噪声与振动控制(2015年4期)2015-01-01 07:08:05
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
振动、测试与诊断(2014年4期)2014-03-01 01:14:09
- 传感技术学报的其它文章
- Design a Composite Bio-Signal Monitoring System Based on SOPC*
- A Method of the CMUT Array Design and Imaging Simulation Based on MATLAB*
- Preparation of AChE/IL-GR/CHI/GCE Enzyme Electrode and Its Application for Chlorpyrifos Pesticide*
- Preparation and Application of Sensitive Enzymeless Sensor for Hydrogen Peroxide Based on Prussian Blue/PDDA-Graphene Modified Electrode*
- An Improved Routing Algorithm Based on SPIN for WSN in Straight Narrow Tunnel
- Research on Acoustic Localization Technology for PIG*