基于HMM与改进距离测度法的齿轮箱故障诊断
2014-09-07 08:20袁洪芳王华庆
振动与冲击 2014年14期
袁洪芳,张 任,王华庆
(1.北京化工大学 信息科学与技术学院,北京 100029;2.北京化工大学 机电工程学院,北京 100029)
齿轮箱作为大型旋转设备中重要零部件,一旦发生故障,设备甚至生产过程均会受其影响。为保证设备安全、高效运行,故障诊断技术应运而生,现已用于各种机械设备,避免众多生产事故的发生[1]。目前齿轮故障诊断研究主要集中在齿轮箱状态检测仪器及分析系统的开发、信号处理与分析、故障机理研究与典型故障特征提取、诊断方法及人工智能应用,包括振动诊断、噪声分析、扭振分析、油液分析、声发射、温度及能耗监测等。信号处理及分析方法亦取得较大发展,如时域波形分析法、功率谱分析、包络谱分析、时间序列分析、小波变换、HHT变换等。以上方法在故障诊断中虽已成熟应用,但仍依赖专家经验。而智能诊断方法因依赖专家经验少、操作简单方便、具有自动性、实时性强等特点得到较大发展[2]。常用智能诊断算法包括人工神经元网络、遗传算法、支持向量机、蚁群算法等,虽在模式识别领域成熟应用,但均存在缺点。神经网络易陷入局部最优;遗传算法对染色体编码及适应度函数设计要求较高;蚁群算法搜索时间过长,易出现搜索停滞。隐马尔科夫模型(Hidden Markov Model,HMM)为不完全观测数据的统计模型,在语音识别领域应用广泛,包容性、适用性强[3],且HMM训练时间短,无需提前建立目标函数,识别准确率较高。HMM的应用包括手语识别、口型识别、车牌识别、人脸检测及信号处理与模式识别领域[4]。齿轮箱智能故障诊断即为模式识别。
利用HMM对齿轮箱故障进行智能模式识别前,先从由齿轮箱振动信号中提取有关故障信息,即特征提取。本文由时域波形、频谱、解调谱及小波域能量中共提取41个特征参数。若用全部特征参数建立HMM模型会使程序运行缓慢降低模式识别效率,诊断实时性低,导致识别准确率较低。为提高HMM识别效率及准确率,需对特征参数集合进行降维去掉参数间相关性、冗余性,提取最优特征参数子集。常用降维方法有主成分分析、线性判别分析、独立成分分析、距离测度法等[5]。距离测度法因算法简单、易于实现、可靠性强等特点在故障诊断参数降维领域应用较广。本文据传统距离测度法理论提出改进算法,对原评价函数进行修正以提取对故障最敏感的特征参数子集。提取最优特征参数后用其对HMM模型进行训练,建立各齿轮的HMM模型,并对齿轮箱进行智能故障诊断。通过齿轮箱模拟试验台采集齿轮正常、断齿、磨损、轴不对中等状态振动数据,利用预处理数据进行仿真实验。实验结果表明本文所提方法有效、可行。
1 特征参数提取与选择
1.1 时域统计参数
齿轮箱发生故障时振动信号能量会变化,并产生冲击信号,各时域统计参数随之改变。因此,时域统计参数能有效反应齿轮箱发生的变化。常用时域统计参数及公式见表1,其中N为信号长度;xi为信号时域幅值。

表1 时域统计参数

表2 频域特征参数
1.2 频域统计参数
信号频谱中含大量特征频率信息,能反映齿轮箱状态的改变,故需提取频域中特征参数。常用特征参数公式见表2,其中p(m)为频谱幅值;M(m=1,2,…,M)为频谱线个数;fm为第m条频谱线频率大小。由于齿轮发生故障时会伴有冲击信号,出现不同程度调制现象,尤其以齿轮啮合频率及谐波为载波的调制为主。调制产生的边频带包含较多有用齿轮故障信息,对振动信号进行解调可获得齿轮故障特征频率。在解调谱中按12个频域特征参数计算公式提取12个解调谱特征参数D1~D12。
1.3 小波能量特征参数
齿轮箱发生故障时,振动信号幅值发生变化,不同故障振动信号各频率段能量变化不同,因此可求出信号各频段能量作为另一组特征参数。小波分解具有多分辨率分析能力,可将原始信号分解到不同频段,每个频段振动信号均含原始信号在该频段内的特征信息。原始信号小波分解后对各频段信号进行重构后分别求其能量为
(1)
式中:xk为重构后信号;N为重构信号长度;J为原始信号分解频段个数。
总能量为
(2)
小波能量特征参数可表示为向量形式
(3)
提取的包括时域、频域、解调谱及小波能量在内共41个特征参数组成齿轮箱故障模式识别特征参数集合,基本覆盖振动信号时、频域内所有故障信息。
1.4 最优特征参数选择
由于提取的特征参数集合数量众多,参数间冗余不相干,为降低故障诊断周期、提高识别准确率,需选出最优特征参数子集,即特征参数降维[6]。本文在传统距离测度法基础上提出改进的最优特征参数选择方法。传统方法原理描述为不同故障模式可视为不同类别,而特征参数则可视为类别中的点。即当某类内点较分散时可能有的点会被划分到其它类别中,故某一类内点较集中时较易识别,此为类内距离需小的原则;同样两类别中心点距离太近时,两类内点可能会相互掺杂,当两中心点相距较远时两类别较易区分,此为类间距离需大的原则。因此当同时达到类间距离大、类内距离小要求时,分类器较易区分各种故障类别。
Ⅰ,Ⅱ,Ⅲ样本在某一特征参数分类的二维平面投影简化模型见图1。设样本有三类,即A类、B类、C类,其中圆心点为样本中心点,圆半径为类内距离,圆心与圆心之间为类间距离。传统的距离测度法基于类间距离大、类内距离小原则,即类间距离平均值与类内距离平均值比值越大越好。其中模型Ⅰ为标准样本分布模式,符合距离测度法原则,样本间较易区分。

图1 三种样本分布
类间距离平均值与类内距离平均值比值较大时,会出现分类效果不理想现象:①Ⅱ分类模型与模型Ⅰ相比圆半径相等,即类内平均距离相等,三个圆之间类间平均距离亦相等,因此类间类内平均距离比值相等,但A类、B类间样本不易区分。原因为A类、B类之间距离过小,而A、B类与C类之间距离过大,导致类间平均距离与类内平均距离比值较大时仍出现分类不理想现象;② Ⅲ分类模型中虽类间类内平均距离比值较大,但由于A类样本类内距离过大、B类样本类内距离过小,同样导致分类效果不理想。为避免在类间类内平均距离比值较大时出现Ⅱ、Ⅲ分类效果不理想现象,需控制类间(类内)距离大小,防止某一类间(类内)距离过大或过小。据此,本文提出改进方法,引入修正函数及衰减因子,计算过程如下[8]:
(1) 样本集合描述
{Sn,f,p,n=1,2,…,Nf;f=1,2,…,F;p=1,2,…,P}
(4)
式中:Sn,f,p为f模式下第n个样本第p个特征参数值;Nf为f模式下样本数;F为模式个数;P为特征参数个数。
(2) 对任意特征参数p,计算其在各模式下类内距离
(5)
式中:f=1,2,…,F;ni,nj=1,2,…,Nf,ni≠nj。
计算F个模式的平均类内距离为
(6)
(3)计算同一模式f下特征参数p的平均值,即类内中心
(7)
计算类与类两两之间距离的平均值,即类间平均距离为
(8)
式中:fi,fj=1,2,…,F,fi≠fj。
(9)
(10)
(5) 两约束因子值越小分类效果越好,因此可定义修正函数对传统方法计算的灵敏度函数进行修正,修正函数定义为
(11)
式中:α为衰减因子,可将修正因子对传统评价函数影响进行衰减,防止修正因子对传统灵敏度评价函数过分修正,常用α值为0.5,1,2。
(6) 特征参数灵敏度评价函数为
(12)
分别计算各特征参数的评价函数,函数值越大该参数分类灵敏度越高,由此可有效提取最优特征参数子集。
2 HMM基本原理及算法
2.1 HMM基本原理
隐Markov模型(HMM)包括两个随机过程,即① 最基本的随机过程Markov链,可描述状态之间的转移;② 描述状态与观测变量之间的统计对应关系[9]。1个HMM可由5个参数描述[10]:即N为模型中Markov链状态数目;M为每个状态对应的可能观测值数目,每个状态观测值由字符或编码表示;π=(π1,π2,…,πN)为初始概率分布矢量,表示N个状态中随机选择某一状态概率;A=(aij)N×N(1≤i,j≤N)为状态转移概率矩阵,表示从一个状态转移到另一个状态的概率;B=(bjk)N×M(1≤j≤N,1≤k≤M)为观测值概率矩阵,表示第j个状态下选择第k个观测值概率。
因此1个HMM模型可记为λ=(N,M,π,A,B)。HMM齿轮箱智能模式识别可表述为求概率p(O|λ)最大值问题,其中O={o1,o2,…,oT}为观测值序列,即特征参数样本。
2.2 HMM训练算法
HMM训练采用Baum-Welch算法[11],即定义ξt(i,j)为给定训练序列O及模型λ时,t时刻Markov模型链处于θi状态、t+1时刻处于θi状态概率为
ξt(i,j)=P(O,qt=θi,qt+1=θj|λ)
(13)
据前向变量、后向变量定义可导出:
ξt(i,j)=[αt(i)αijbj(ot+1)βt+1(j)]/P(O|λ)
(14)
则t时刻Markov链处于θi状态概率为
ξt(i)=P(O,qt=θi|λ)=
(15)
模型中三个参数重估公式[12]为
(16)
(17)
(18)

2.3 HMM故障识别过程
以齿轮箱某状态的HMM模型为例,简要阐述HMM在齿轮箱模式识别中的作用。齿轮箱发生某一故障时先提取特征参数,并将其量化到1~M之间正整数,初始化HMM模型各参数,其中状态数为N,观测值为1~M间正整数,见图2。

图2 齿轮箱某状态HMM模型
训练阶段据训练算法训练模型达收敛后求得π,A,B值,最终获得该故障模式的HMM模型λ=(N,M,π,A,B);模式识别阶段输入观测值序列(特征参数集合)O={o1,o2,…,oT}到训练好的各模型中,分别计算输出概率p(O|λ),输出概率越大与该模型越匹配,属于该模型故障的概率值越大,通过比较输出概率值大小对故障类型进行决策。
3 实验验证及分析
实验平台为齿轮箱故障诊断模拟试验台,主动轮齿数75,从动轮齿数55,轴承转速300 r/min,采样频率100 kHz。通过加速度传感器分别采集齿轮正常、磨损、断齿及轴不对中四种状态振动信号,每20000个数据为一组共采集100组,其中50组作为训练数据,50组作为测试数据。实验数据规格见表3。

表3 实验数据规格
齿轮断齿故障的时域信号见图3。由图3看出,波形中周期性冲击信号明显,能量较大,通过提取信号中特征参数并利用HMM进行模式识别即可判断故障类型。

图3 齿轮断齿故障时域波形
据改进的距离测度法分别计算时、频域及小波能量域中41个特征参数评价函数值并归一化,结果见图4。由图4看出,41个特征参数灵敏度的相对大小,据特征参数尽量少原则,选取6个灵敏度值最大特征参数作为最优特征参数子集进行模式识别,包括两时域参数T4,T6,两频域参数F1,F10,两解调谱参数D1,D9。而四个小波能量参数未被选中,说明小波分解并重构后各频率段间能量无明显区别,不能显著反映齿轮故障特征。

图4 特征参数灵敏度值

图5 HMM模型训练曲线
据所选灵敏度较高的6个特征参数,利用HMM对齿轮箱4种状态进行训练,训练曲线见图5,其中横坐标为迭代次数,由于HMM所求概率值较小,为便于比较,本文对输出似然概率值取对数,故纵坐标为对数似然概率值。
HMM模型训练速度较快,经20次迭代后4种状态模型均已达到收敛误差。模型训练后所得参数包括初始概率分布矩阵、状态转移概率矩阵及观测值概率矩阵。利用另200组数据分别对4种模型识别能力进行测试,即求每组数据的对数似然概率p(O|λ)值,每组测试数据4种HMM模型的测试结果见表4~表7。表4~表7中-Inf代表负无穷大,由于为对数似然概率,故-Inf表示概率接近0。
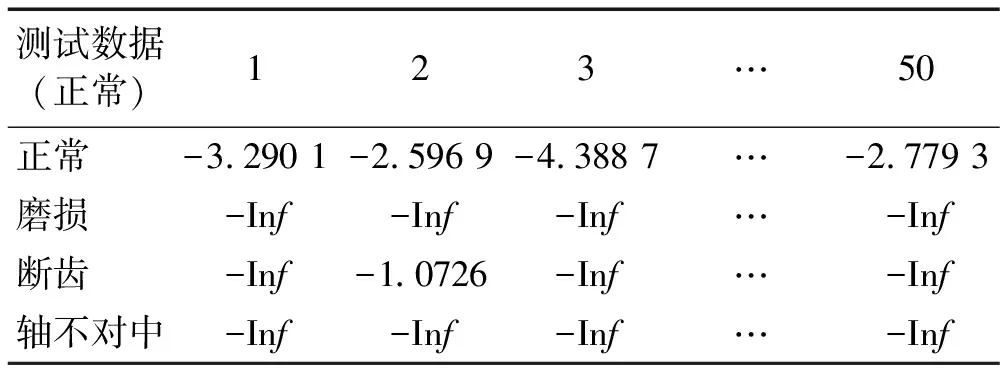
表4 正常测试数据4种HMM模型的输出对数似然概率
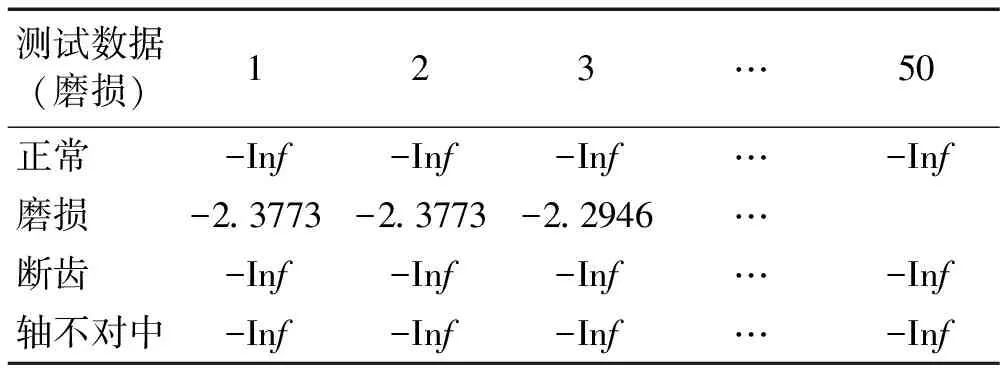
表5 磨损测试数据4种HMM模型的输出对数似然概率

表6 断齿测试数据4种HMM模型的输出对数似然概率

表7 轴不对中测试数据4种HMM模型的输出对数似然概率
测试结果表明,在每种状态50组测试数据中除少数样本未能正确分类外,大部分样本均能准确分类。4种模型的识别统计结果如见表8。由表8看出,每种状态50组共200组测试样本实验中,基于HMM的齿轮箱故障模式识别平均准确率达95.5%。基于改进的距离测度法及HMM智能齿轮箱故障诊断方法具有算法简单、训练速度快、识别准确率高等优点,证明本文所提方法在齿轮箱智能故障诊断中有效、可行。

表8 测试样本识别统计结果
4 结 论
(1) 用本文所提新的齿轮箱智能故障诊断方法提取的齿轮振动信号在时域、频谱、解调谱及小波能量中特征参数能充分覆盖齿轮箱故障信息。
(2) 用改进的距离测度法提取最优特征参数子集,该方法据最大类间距离、最小类内距离原则提出的新特征参数灵敏度评价函数能有效对参数集合降维,选灵敏度较高的参数组成最优特征参数集合。
(3) 本文通过将HMM引入齿轮箱故障识别中,训练速度快,平均识别准确率达95.5%。
[1] 屈梁生,张西宁,沈玉娣.机械故障诊断理论与方法[M].西安:西安交通大学出版社,2009.
[2] 李红卫,杨东升,孙一兰,等.智能故障诊断技术研究综述与展望[J].计算机工程与设计,2013, 34(2):632-637.
LI Hong-wei, YANG Dong-sheng, SUN Yi-lan,et al.Study review and prospect of intelligent fault diagnosis technique[J].Computer Engineering and Design,2013,34(2): 632-637.
[3] 李宁.旋转机械的测试信号分析及隐马尔科夫模型应用研究[D].重庆:重庆大学,2010.
[4] Chien J T,Liao C P.Maximum confidence hidden markov modeling for face recognition[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2008, 30(4): 606-616.
[5] 肖健华,吴今培,樊可清,等.粗糙主成分分析在齿轮故障特征提取中的应用[J].振动工程学报,2003,16(2):166-170.
XIAO Jian-hua, WU Jin-pei, FAN Ke-qing, et al.Rough principal component analysis and its application on feature extraction for gears[J].Journal of Vibration Engneering, 2003,16(2):166-170.
[6] 杨先勇.基于信号局部特征提取的机械故障诊断方法研究[D].浙江:浙江大学,2009.
[7] 郑军,王巍,杨武,等.基于类间距离参数估计的文本聚类评价方法[J].计算机工程, 2009, 35(9): 37-42.
ZHEN Jun, WANG Wei, YANG Wu,et al.Textclustering evaluation method based on parameter estimation of distances between clusters[J].Computer Engneering, 2009, 35(9):37-42.
[8] Lei Ya-guo,He Zheng-jia,Zi Yan-yang.A new approach to intelligent fault diagnosis of rotating machinery[J].Expert Systems with Applications,2008,35(4):1593-1600.
[9] 吴昭同,杨世锡.旋转机械故障特征提取与模式识别新方法[M].北京:科学出版社,2012.
[10] 岳夏.基于HMM的复杂条件故障诊断研究[D].广州:华南理工大学,2012.
[11] 郭明威,倪世宏,朱家海.基于EMD-HMM的BIT间歇故障识别[J].振动,测试与诊断,2012,32(3):468-470.
GUO Ming-wei, NI Shi-hong, ZHU Jia-hai.Intermittent fault diagnosis for built-in test system based on EMD and HMM[J].Journal of Vibration, Measurement & Diagnosis, 2012,32(3):468-470.
[12] Li Qing-min,Zhao Tong,Zhang Li,et al.Mechanical fault diagnostics of onload tap changer within power transformers based on hidden markov model[J].IEEE Transactions on Power Delivery,2012,27(2):596-601.
猜你喜欢
山东冶金(2022年3期)2022-07-19
空间科学学报(2020年1期)2021-01-14
无线互联科技(2020年22期)2021-01-11
弹箭与制导学报(2020年2期)2020-09-01
中国交通信息化(2019年12期)2019-08-13
计算机与生活(2019年8期)2019-08-12
制造技术与机床(2017年11期)2017-12-18
制造技术与机床(2017年4期)2017-06-22
自动化学报(2017年4期)2017-06-15
中国交通信息化(2017年8期)2017-06-06