显微镜物镜精密调焦装置的研究
2014-09-06 11:33:54,,,
机械与电子 2014年12期
,, ,
(南京航空航天大学机械结构力学与控制国家重点实验室,江苏 南京 210016)
显微镜物镜精密调焦装置的研究
周昇,黄卫清,朱华,王寅
(南京航空航天大学机械结构力学与控制国家重点实验室,江苏 南京 210016)
提出了利用TRUM-30型旋转超声电机为驱动元件的显微镜物镜精密调焦装置。对调焦装置的工作原理和机械结构进行了介绍和分析,设计了调焦装置的零件并对其进行了有限元分析,得出了调焦装置调焦的理论分辨率。对调焦装置进行了实验,得出了其调焦分辨率关于驱动电压信号频率的参数变化曲线,并给出了显微镜物镜运动位移随时间变化曲线。
超声电机;显微镜物镜;精密调焦;有限元分析
0 引言
近年来,随着科学技术的进步,特别是宇宙飞船、人造卫星、运载火箭、飞机,以及各种电子设备、精密测量仪器等高技术产品的发展,许多领域对定位和驱动的要求越来越高,部分环境需要达到微米、纳米级的精度要求。因此,精密定位装置的研究和设计在越来越广泛的范围内得到人们的重视。与此同时,各种功能材料的不断涌现,加工与制造工艺的不断完善,也为新型精密定位装置的研究和设计提供了条件。由于受工作原理和结构形式的限制,传统电磁电机已经无法满足这些要求,超声电机是一种先进的微特电机,它的出现弥补了传统电磁电机的不足。
国外在将超声电机用在微型定位及驱动领域起步较早,已经取得了很多成就。其应用摩擦驱动、尺蠖运动[1]、超声波振动和惯性-摩擦[2]等原理,巧妙地实现了大行程、高精度的要求[3]。CEDRAT公司所生产的压电驱动器如APA、SPA系列,已广泛应用于显微镜物镜的纳米定位和扫描系统等各种微驱动场合。PI公司也有诸如P-720、P-721和P-725等多种基于压电材料的精密定位和调焦装置。国内在将压电材料应用在精密定位领域的成果还不是很多,台湾国立高雄第一科技大学机械自动化工程学院,研制的惯性冲击精密定位工作台定位精度可以达到10 nm。广东工业学院的杨宜民研究了仿生型步进式直线执行器,步距0.1~16 μm,步距误差小于0.1 μm,适用于低速自动控制中的超高精度的定位和驱动[4]。吉林大学研制的新型惯性冲击型驱动机构,在激励频率为4 Hz、激励电压为30 V的条件下,该驱动机构的步长分辨率为0.3 μm,速度为1.2 μm/s。
针对显微镜物镜焦距调节的应用背景[5],利用楔形滑块机构转换位移的原理,将TRUM-30型旋转超声电机作为核心驱动元件,制作了显微镜物镜精密调焦装置。通过ANSYS有限元软件对调焦装置的外框进行了有限元分析。实验结果表明,该精密调焦装置具有工作平稳、步距均匀和定位精度高等优点,具有较高的研究价值和广泛的应用前景[6]。
1 调焦装置的结构和工作原理
1.1 调焦装置的结构
TRUM-30型旋转超声电机作为驱动元件,通过垫板安装在外框的左端面上。超声电机的外伸轴上安装有输出轴,输出轴与楔块通过螺纹配合。楔块在导轨中运动,导轨通过其左侧的螺纹孔安装在外框的左端面上。显微镜物镜通过其顶端的螺纹安装在下板的右侧,下板通过其右端的螺纹孔安装在外框的右端,下板的左端加工有通孔,在该通孔和楔块的斜面之间安装有1个钢球。上板通过其左侧的螺纹孔安装在外框的左端面上,右侧安装有法兰。整个精密调焦装置通过法兰上端的螺纹安装在显微镜的转换器上。
1.2 调焦装置的工作原理
楔形滑块机构如图1所示。
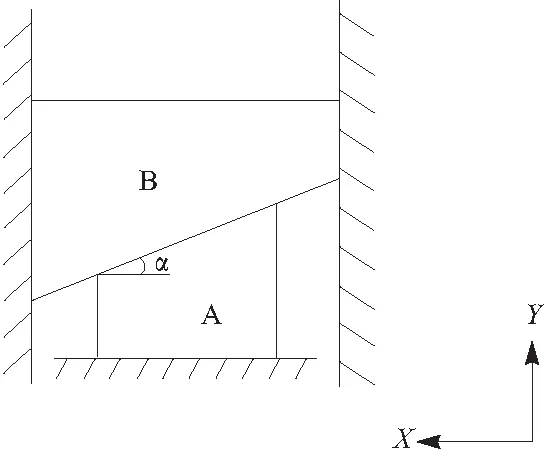
图1 楔形滑块机构
物体A斜面倾角为α,假设A沿着X轴正方向移动位移x,B物体因为在X方向的自由度受到约束,其只能沿着Y轴正方向移动,假设其移动位移为y,由三角原理易知y/x=tanα。因此,该机构可以实现物体运动位移方向和大小的转换,其可以将物体A沿着X方向的运动位移x转换成物体B沿着Y方向的运动位移y,且y=x×tanα。
所设计的精密调焦装置即是利用这一原理,实现TRUM-30型旋转超声电机输出位移方向和大小的转换。整个调焦装置的具体运动过程如下:对TRUM-30超声电机施加驱动电压信号,超声电机外伸轴旋转,带动安装在其上的输出轴旋转输出扭矩。输出轴通过螺纹传动推动楔块在导轨的凹槽中做直线运动,楔块通过斜面上的钢球推动下板做竖直向上的运动,则显微镜物镜将随着下板一起做竖直向上的运动。在此过程中,外框的右端因为和下板的右端通过螺钉连接在一起,因此,外框整体也将绕着左端面的4个柔性铰链做竖直向上的运动。因为外框的左端面和右端面分别加工有4个柔性铰链,所以可以保证显微镜物镜的运动是沿着竖直方向的平动。改变超声电机输出轴的旋转方向,则显微镜物镜可以做竖直向下的运动。
所设计的精密调焦装置中的楔块其斜面倾角为α,假设超声电机输出轴的转速为nr/s,调焦装置工作时,通电时间为ms,输出轴与楔块上相配合的螺纹螺距为P。则在1个工作周期内,超声电机通过输出轴推动楔块沿着水平方向输出的位移为:
Sx=P×m×n
(1)
则显微镜物镜在竖直方向上运动的位移为:
Sy=P×m×n×tanα
(2)
Sy即为显微镜物镜在1个工作周期内移动的距离,也就是该精密调焦装置的调焦分辨率。由式(1)和式(2)可知,该精密调焦装置的调焦精度取决于超声电机的定位精度,而超声电机定位的精度可以达到nm级别[7],因此,理论上该精密调焦装置的调焦分辨率可以达到nm级别的精度。
2 有限元分析
TRUM-30型旋转超声电机推动下板运动时,要求显微镜物镜、下板和外框一起作为一个整体做上下平动。为了达到这一要求,外框的设计对于整个调焦装置至关重要。因此,在外框的左右2个端面上分别加工有4个柔性铰链[8],整个外框整体为一柔性机构[9]。为了验证该设计方案是否合理,利用ANSYS软件对外框进行有限元分析。定义模型的材料参数后,进行结构建模和网格划分。对外框的左端面施加固定约束,对下板和外框右端的连接处施加竖直向上的力。然后进行有限元求解。
外框在X、Y方向的位移云图如图2,图3所示。图中X方向即为显微镜物镜运动时的竖直方向,Y方向即为显微镜物镜的水平方向。从图2和图3中可知,外框沿X方向的位移为18.9 μm,沿Y方向的位移为0.158 μm。Y方向的位移远小于X方向的位移,可以忽略不计。因此,外框结构设计合理,能保证显微镜物镜在竖直方向做微幅平动,方向性好,且其位移输出在μm级,达到预期设计目标。

图2 外框X方向位移云图

图3 外框Y方向位移云图
3 超声电机需要的驱动信号
TRUM-30型旋转超声电机工作时,需要施加2路驱动信号CH1和CH2。2路信号均为正弦波,相位差为90°。当CH1比 CH2的相位超前90°时,电机输出轴正转,从而推动显微镜物镜竖直向上运动。当CH2比 CH1的相位超前90°时,电机输出轴反转,从而推动显微镜物镜竖直向下运动。因此,改变2路驱动电压信号的相位,即可控制显微镜物镜沿着上下2个方向运动[10]。
4 实验研究
4.1 实验系统组成
设计的精密调焦装置的实验系统组成如图4所示。在实验过程中,把信号发生器的输出端接到功率放大器上,以提高超声电机的输入电压。通过信号发生器输出的电压信号经过功率放大器放大后,通过导线施加到超声电机上,驱动整个精密调焦装置工作。显微镜物镜镜头的运动位移由激光位移传感器测取,测得的位移数据通过接口实时传入PC机上,通过专门的数据处理软件记录数据并输出为Excel格式文件。

图4 精密调焦装置实验系统组成
精密调焦装置样机的实验如图5所示。实验中,通过测量显微镜物镜镜头向上移动的距离,测试该精密调焦装置的参数和性能。

图5 精密调焦装置实验
4.2 调焦分辨率的测试
由式(1)和式(2)可知,该精密调焦装置的调焦分辨率Sy取决于超声电机的转速n和通电时间m。超声电机的工作电压频率f范围在35~38 kHz之间,工作电压峰峰值为360 V。超声电机的转速n随着驱动电压频率f的增大而减小。为了研究该调焦装置的分辨率Sy随驱动电压频率f的变化关系,取驱动电压频率f的范围为35~38 kHz,间隔为0.5 kHz,通电时间m取25 ms,楔块的斜面倾角α为11°。通过激光位移传感器,测得的调焦分辨率Sy随驱动电压频率f的变化曲线如图6所示。
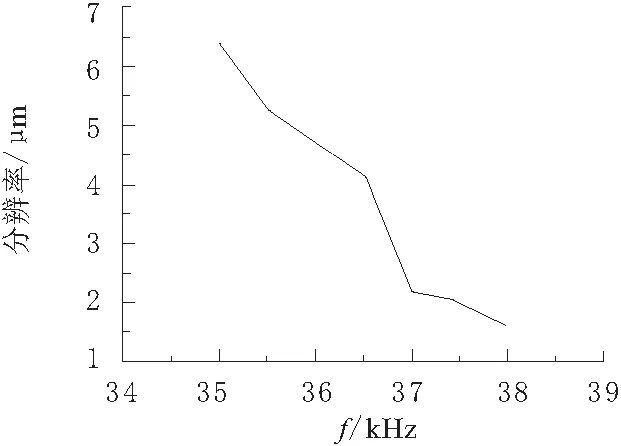
图6 调焦分辨率随电压频率变化曲线
从图6可知,随着驱动电压频率f的增大,超声电机输出轴的转速n不断减小,在1个工作周期内,显微镜物镜的移动距离也随之减小。因此,调焦装置的调焦分辨率Sy,随着驱动电压频率f的增大而呈减小趋势。
4.3 调焦装置的性能测试
为了验证精密调焦装置工作性能是否平稳,利用激光位移传感器,测量显微镜物镜镜头在5 s时间内的运动位移曲线。采样点设置为50 000个,这些数据点代表显微镜物镜镜头在某一时刻相对于基准平面的距离,将这些数据点导入到Origin软件中,即可绘制出显微镜物镜镜头的运动位移S随时间变化的曲线。通过反复实验发现,在驱动电压频率为35 kHz左右时,超声电机转速过快,显微镜物镜运动不够平稳;在驱动电压电压频率为38 kHz左右时,超声电机转速过慢,不利于激光位移传感器测取数据。因此,取驱动电压频率为37 kHz。得到的显微镜物镜镜头运动位移S随时间变化曲线如图7所示。

图7 显微镜物镜镜头运动位移随时间变化曲线(上升)
从图7中可以看出,精密调焦装置运行平稳,步距均匀,显微镜物镜的位移曲线近似呈线性变化。重新设置2路驱动电压信号,使得CH2超前CH1相位为90°,则可实现超声电机输出轴的反转。此时,得到的显微镜物镜镜头运动位移S随时间变化曲线,如图8所示。

图8 显微镜物镜镜头运动位移随时间变化曲线(下降)
从图8可以看出,精密调焦装置可以实现显微镜物镜的双向位移调节,且显微镜物镜在向下运动时,其运动位移曲线也近似呈线性变化,说明此时该调焦装置运行平稳,步距均匀。
综上所述,精密调焦装置在驱动电压频率为37 kHz,电压峰峰值为360 V时,工作性能良好,步距均匀,可以实现显微镜物镜的双向位移调节,其调焦分辨率可以达到2 μm的精度。
5 结束语
以TRUM-30型旋转超声电机作为驱动元件,利用楔形滑块机构位移转换的原理,设计并制成了显微镜物镜精密调焦装置。分析了该调焦装置的运行原理和工作过程,针对该装置搭建了实验系统,确定了实验方法,并对样机的工作性能进行了测试。样机的实验结果表明,通过改变2路驱动电压信号的相位,该精密调焦装置能够实现显微镜物镜的双向位移调节。
[1] Lobontiu N,Goldfarb M,Garcia E.Piezoelectric-driven inchworm locomotion device[J].Mechanism and Machine Theory,2001,36(4):425-443.
[2] 迟冬祥,颜国正,丁国清.基于惯性-摩擦原理的PZT驱动四自由度微驱动器的研究[J].光学精密工程,2001,9(2):135-138.
[3] 姜文锐,卢泽生.一种大行程高精度微执行器的研究[J].传感技术学报,2006(5):1555-1558.
[4] 陈兵芽,刘莹,胡敏,等.微执行器的研究与展望[J].微纳电子技术,2005(12):561-565.
[5] 朱华,曹如意,菅磊.应用于干涉显微镜的直线压电作动器[J].光学精密工程,2013(6): 1524-1530.
[6] Claeyssen F,Ducamp A,Barillot F,et al.Stepp-ing piezoelectric actuators based on APAs:11th international conference on new actuators[C]//Bremen,Germany,2008.
[7] 赵淳生,朱华.超声电机技术的发展和应用[J].械制造与自动化,2008(3):1-9.
[8] 马立,谢炜,刘波,等.柔性铰链微定位平台的设计[J].光学精密工程,2014(2):338-345.
[9] 杨启志,马履中,尹小琴.全柔性机构中柔性运动副的结构型式与应用[J].江苏大学学报(自然科学版),2003(4):9-12.
[10] 陈志华,赵淳生.超声电机控制中的若干关键问题[J].微特电机,2002(6):23-25.
Study on Microscope Objective Precision Focusing Device
ZHOUSheng,HUANGWeiqing,ZHUHua,WANGYin
(State Key Laboratory of Mechanics and Control of Mechanical Structures,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
Proposed microscope objective precision focusing device using TRUM-30-type ultrasonic motor as drivingelement.Introduced and analyzed the working principle and mechanical structure of the focusing device,designed the part and did finite element analysis of it,getting the microscope objective theoretical resolution.Did the experiments,getting the curve of the resolution of the microscope objective lens focusing varying with the driving voltage signal and it's frequency,and gives the curve of the displacement of the microscope objective lens varing with time.
ultrasonic motor; microscope objective; precision focus; finite element analysis
2014-09-04
TH742
A
1001-2257(2014)12-0031-04
周昇(1989-),男,安徽六安人,硕士研究生,研究方向为惯性冲击式压电直线电机;黄卫清(1965-),男,江苏南通人,教授,博士研究生导师,研究方向为压电精密致动技术;朱华(1978-),男,江苏东台人,副研究员,硕士研究生导师,研究方向为超声电机技术;王寅(1986-),男,江苏淮安人,博士研究生,研究方向为直线型压电电机技术。
猜你喜欢
橡塑技术与装备(2021年12期)2021-06-24 09:30:34
科普童话·学霸日记(2021年11期)2021-05-30 10:48:04
汽车电器(2018年6期)2018-07-04 07:25:28
中学生数理化·中考版(2017年1期)2017-03-29 18:56:24
光学精密工程(2016年4期)2016-11-07 09:05:39
光学精密工程(2016年4期)2016-11-07 09:04:52
光学精密工程(2016年3期)2016-11-07 09:04:17
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
幼儿智力世界(2015年6期)2015-08-17 09:30:17
空间控制技术与应用(2015年1期)2015-06-05 12:22:16