基于ADAMS及ANSYS的层码垛设备的设计
2014-09-06 01:19秦宝荣王淑华
机械设计与制造工程 2014年11期
刘 江,秦宝荣,王淑华
(浙江工业大学 特种装备制造和先进加工技术教育部重点实验室, 浙江 杭州 310014)
基于ADAMS及ANSYS的层码垛设备的设计
刘 江,秦宝荣,王淑华
(浙江工业大学 特种装备制造和先进加工技术教育部重点实验室, 浙江 杭州 310014)
切割成型后的陶粒增强加气砌块需要码垛搬运至特殊场地进行养护。结合该物料的自身特殊性,设计了一种层码垛机设备。首先用Solidworks建立了三维模型,确定了结构方案的可行性;然后用ADAMS对其进行了运动仿真和受力分析,为层码垛机选择合适的运动方案;最后借助ANSYS有限元法对层码垛设备整体进行了静动态特性分析,评价了其性能并进行结构改进,提高了其动态特性性能,得到了满意的结果。
层码垛机;砌块物料;运动仿真;受力分析;静动态分析
砌块物料即陶粒增强加气砌块是一种新型建筑节能自保温材料,具有质量轻、强度高、保温性能好、吸水率低等特点[1-2]。现有的生产工艺中要求陶粒增强加气砌块码垛并搬运至特殊场地进行养护,而码垛机器人成本较高且适用于精度要求较高的场合,不适合中小型企业。本文结合砌块物料自身材料结构特殊性,设计了一种专用于陶粒块状物料的码垛机设备,借助ADAMS对该设备进行运动分析,验证了整体过程运动规律的合理性;用有限元分析方法对其进行了静动态特性分析,并根据其整机动态特性性能的不足对整机进行了改进,提高了其动态特性性能,得到了满意的结果。
1 砌块物料码垛设计要求
切割后的砌块从低位进料,码垛好的砌块总共有6层,尺寸是1 200mm×1 200mm×1 200mm。 物料码垛要求:对砌块物料完整性损坏小,夹持稳定;码垛机的码垛速度为8min/循环,最大码垛效率为26t/h;砌块每层交叉叠放,排列整齐。
2 总体方案设计及工作原理
根据砌块物料码垛设计的要求,通过多种方案的对比,得出最佳方案,其整体模型结构如图1所示。
砌块物料在码垛指定位置等待码垛,码垛机升降框架装置驱动夹持装置完成夹持物料动作并进行上下运动,待移动到一定高度后,水平驱动装置驱动夹持装置和物料移动到出料处正上方,再由升降框架装置驱动夹持物料装置下降至指定高度,松开物料,完成一层砌块的码垛,夹持物料装置再回到初始位置等待下一层的码垛。其中旋转装置可以驱动夹持装置旋转90°。
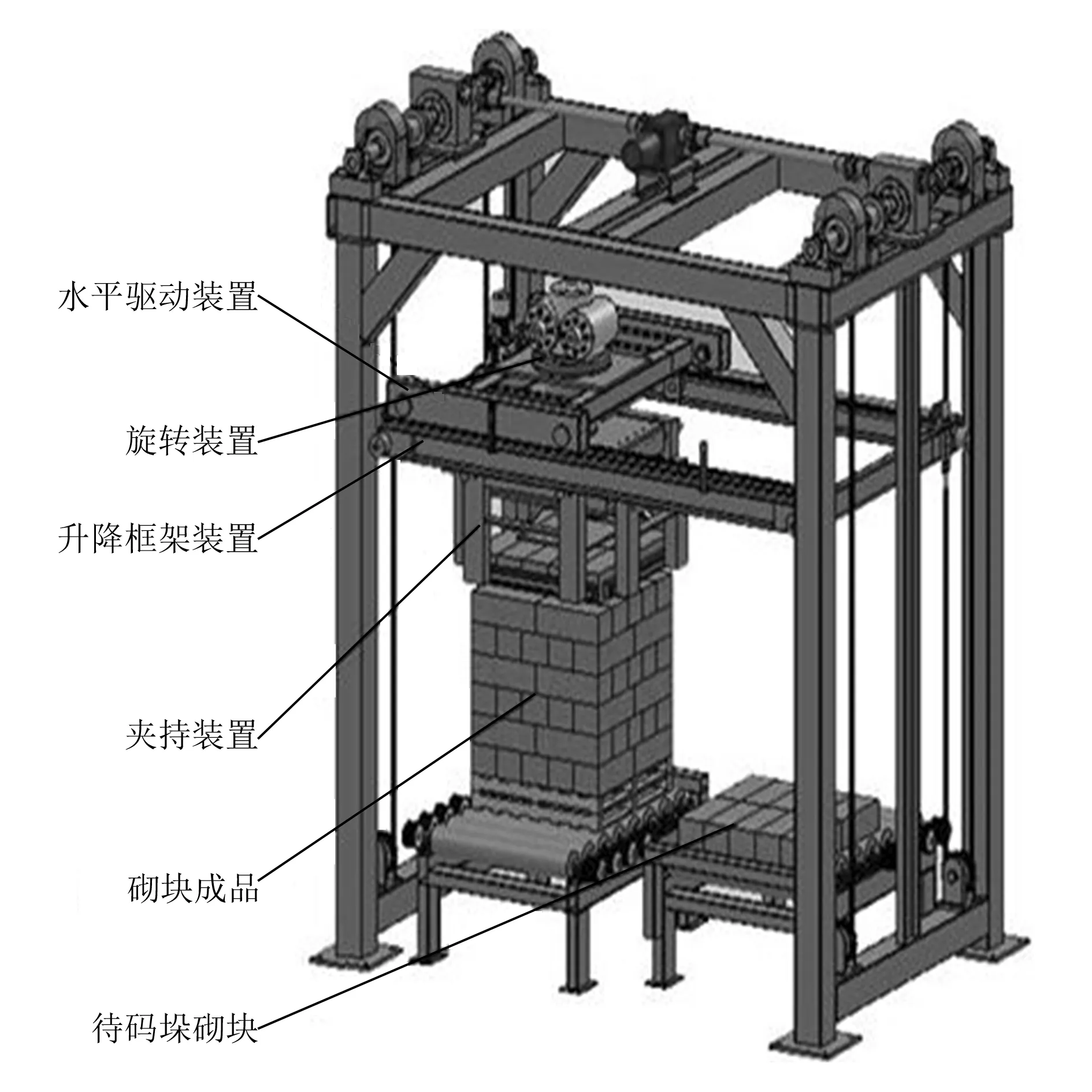
图1 码垛机的总体方案结构模型
3 码垛机的运动学仿真
3.1码垛机的初始参数设置
根据设计要求,将仿真时间设置为80s,步数(Steps)1 500。反复分配时间并进行计算,将每层码垛工作分解成8个动作行程,时间分配见表1,过程图如图2所示。
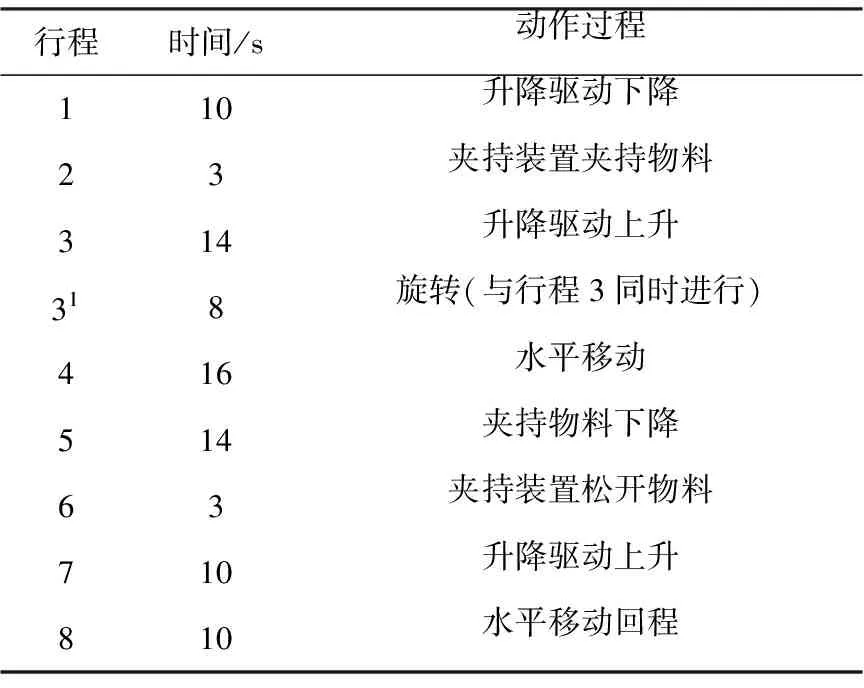
表1 码垛设备一层码垛时间分配
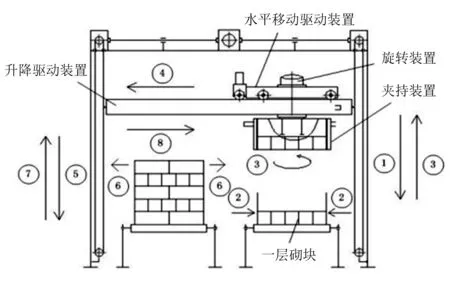
图2 砌块码垛运动过程图
3.2关键部件装置运动学仿真分析
ADAMS/View中提供了多种时间函数,可以通过这些时间函数来定义运动[3],本文采用ADAMS提供的STEP阶跃函数来控制各部件的驱动。
3.2.1升降框架装置运动学仿真
升降框架装置驱动夹持旋转装置一起上下运动,通过仿真得出其驱动力、位移以及升降速度曲线,如图3~5所示。
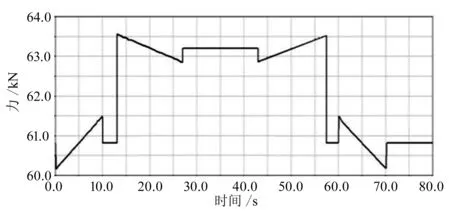
图3 升降驱动力曲线
从图3可以看出,升降框架装置上升和下降的驱动力最大需要62kN,这为电机的选型以及各传递构件的设计提供了依据。从图4可以看出,升降驱动装置位移最大为1 800mm,位移设置平稳,初步判断位移设置比较合理。从图5可以看出,最大速度为270mm/s,该设备运动过程中速度没有突变现象,上下运动过程比较稳定。

图4 升降驱动装置位移曲线

图5 升降驱动装置速度曲线
3.2.2水平移动装置运动学仿真
水平横向移动装置驱动旋转夹持装置进行横向移动,仿真得出其驱动力、位移以及水平移动速度曲线,如图6~8所示。
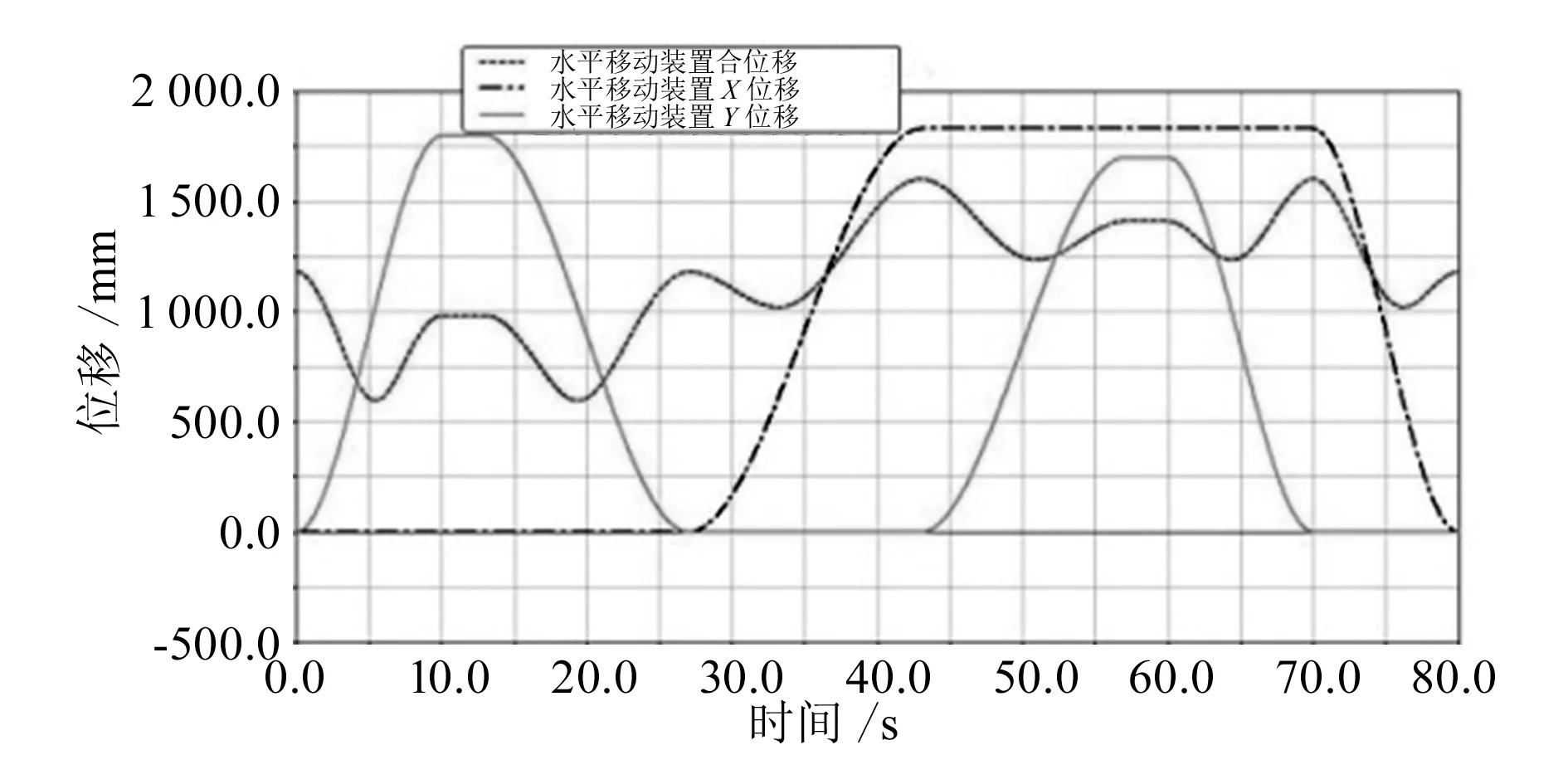
图6 水平移动装置位移曲线
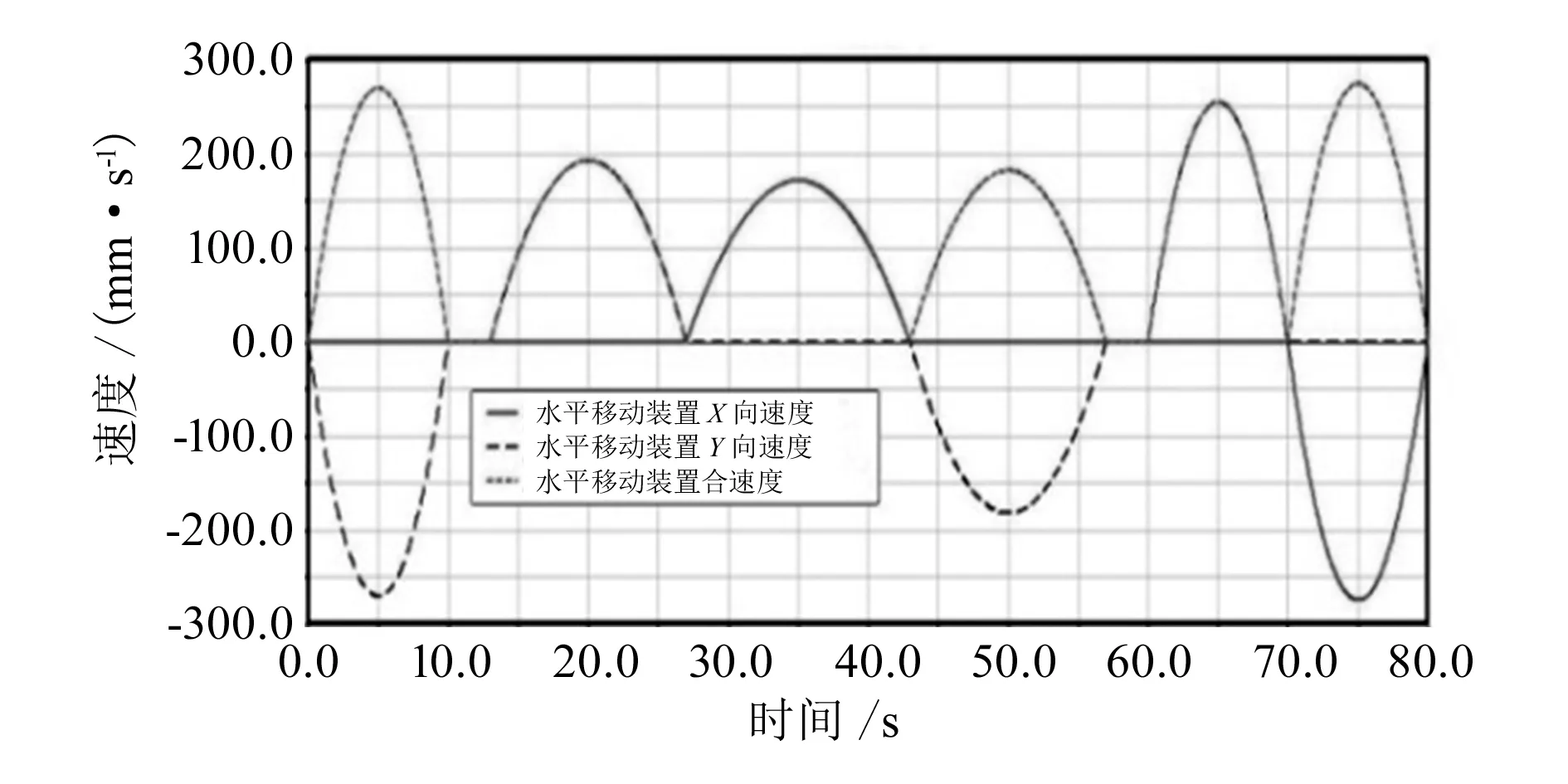
图7 水平移动装置速度曲线
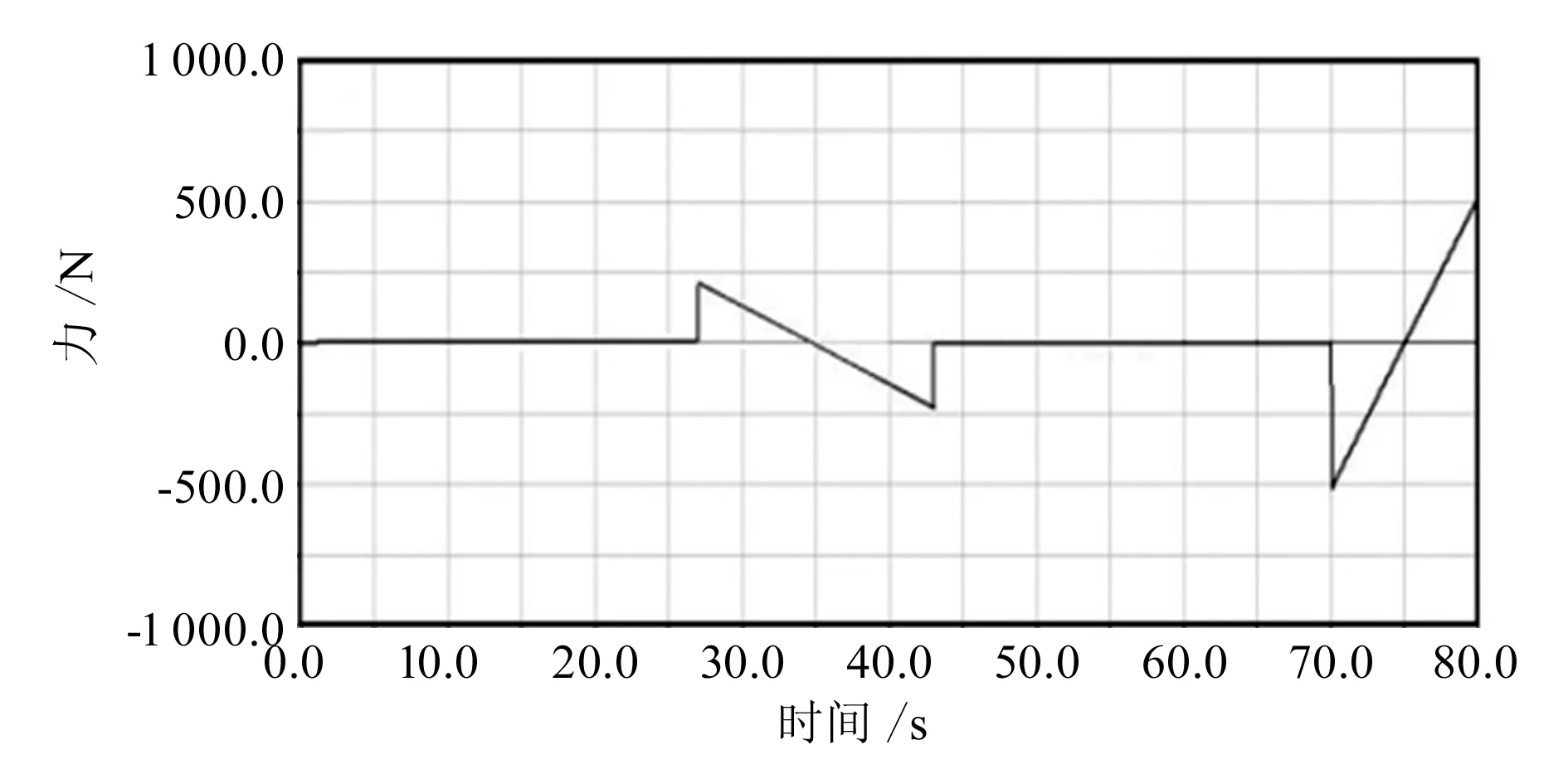
图8 水平移动驱动力曲线
从图6可以看出,水平移动装置在整个运动过程中比较平稳,位移曲线过渡自然,没有突变现象,最大位移是1 830mm,位移设置合理。从图7可以看出,水平移动装置速度曲线没有突变,最大速度为274mm/s,比较合理。从图8得出水平移动装置驱动力最大需要500N,这为水平方向运动驱动电机选型以及输出轴等构件的设计提供了依据。
3.2.3旋转装置运动学仿真
当砌块随机械手夹持装置运动至出料输送线上方时,由旋转电机驱动旋转夹持装置,从而驱动夹持有砌块的夹持装置旋转90°。通过仿真得出其角速度、角加速度以及旋转轴力矩曲线图,如图9,10所示。

图9 旋转装置角速度和角加速度曲线
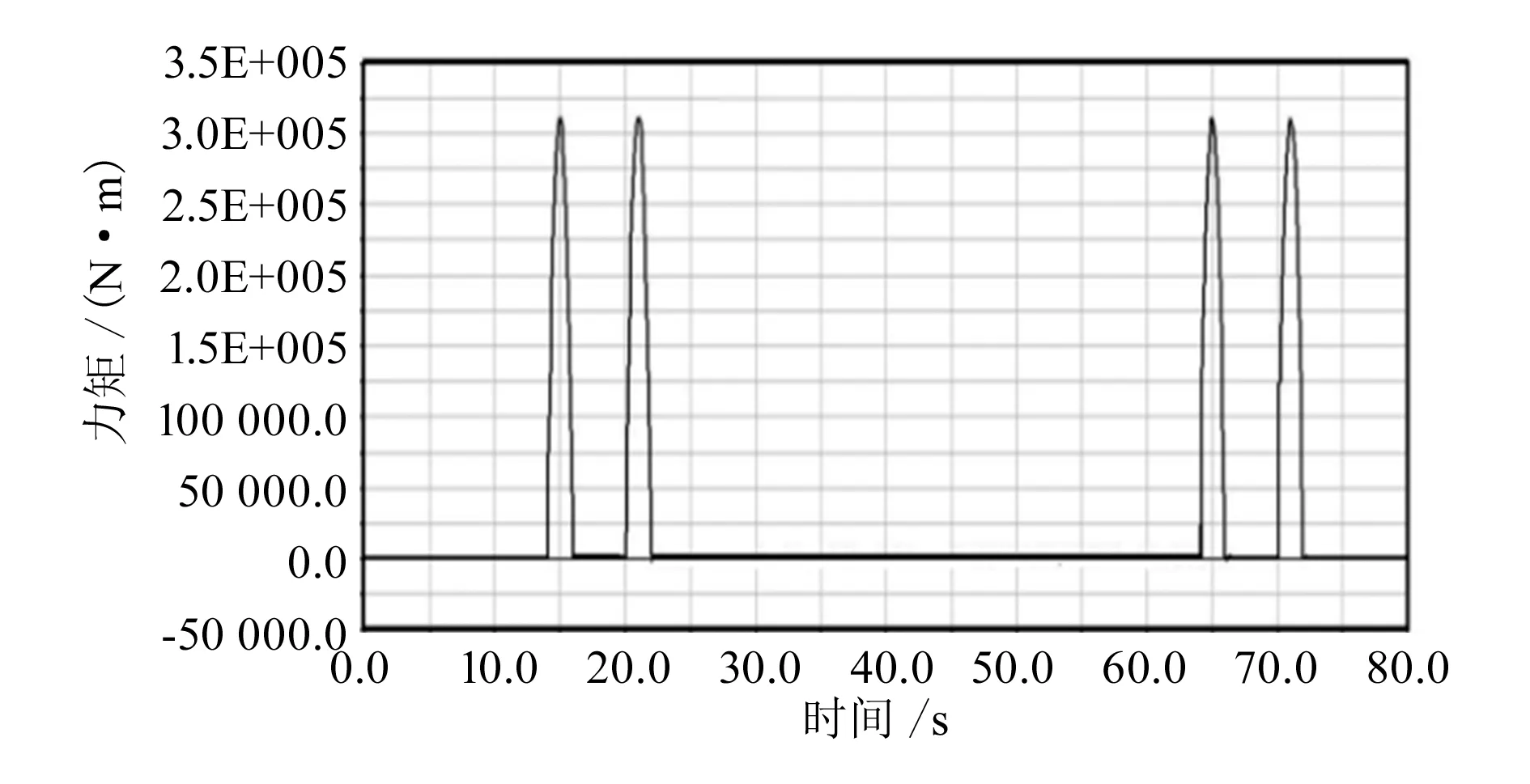
图10 旋转轴驱动力矩曲线
从图9看出,旋转装置旋转过程中是先加速、再匀速、后减速的运动方式,其角加速度最大为11.2deg/s2,角速度最大为15.0deg/s,整个旋转运动过程比较平稳,没有突变角速度等现象,比较合理。从图10可以看出,其旋转过程中的转矩为3 000N·m,这就要求旋转电机或者旋转油缸输出3 000N·m的力矩,为旋转电机选型和旋转轴等部件的设计提供了依据。
3.2.4夹持装置运动学仿真
对夹持装置夹取砌块的运动情况做分析,主要目的是研究夹持装置液压缸的运动状况及其输出力的大小,为液压缸的选型做参考。夹持装置夹取砌块的运动是由液压缸带动机械手爪做开合运动。模拟仿真得出了液压缸驱动位移、液压缸活塞运动速度以及液压缸输出力曲线图,如图11~13所示。
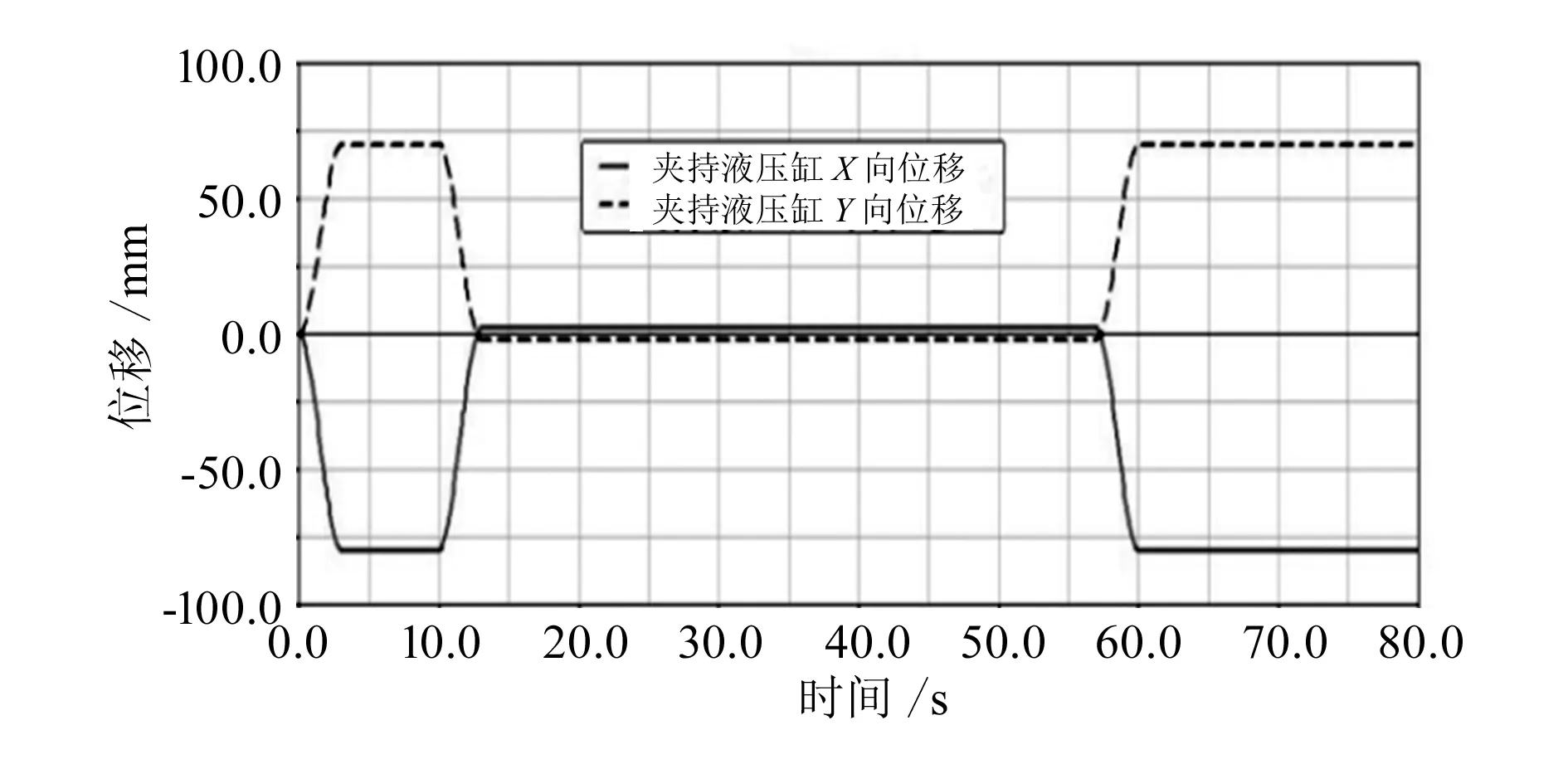
图11 液压缸驱动位移曲线图

图12 液压缸活塞运动速度曲线图
从图11可以看出,液压缸活塞在回缩至80mm时便停止运动,说明此时机械手臂已将砌块夹紧,由于液压缸是双驱动夹持手爪运动,故行程是160mm。从图12可以看出,液压缸的运行最大速度为19mm/s,这里采用的是等速缸,所以往复运动的速度相同。从图13可以看出,液压缸在驱动手爪夹持物料过程中的输出力最大为100 000N。
图14所示的是物料与砌块之间的摩擦力,最大为620N。从图15可以看出,各关键运动部件加速度存在有限值突变现象,不过这一突变引起的冲击是柔性冲击,对整体工作影响较小,可以忽略不计。
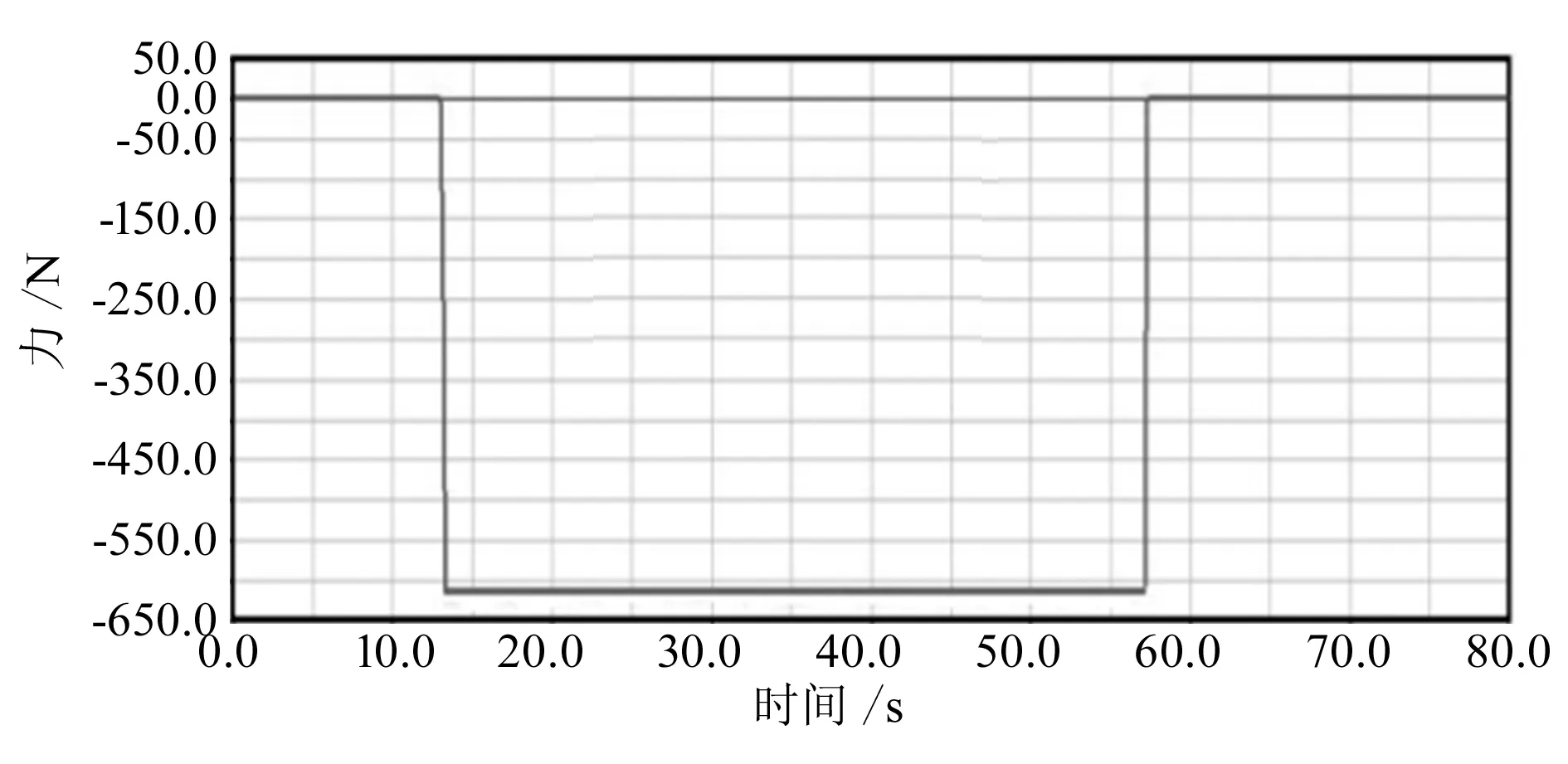
图14 夹持手爪与块状物料的摩擦力曲线
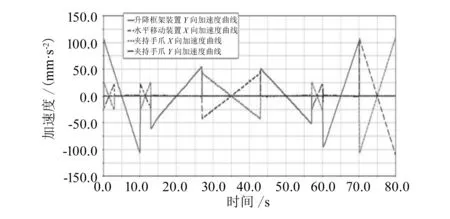
图15 各关键运动部件加速度曲线
通过ADAMS仿真分析,得到了码垛机各关键部件在各个时刻的位移、速度、加速度、角速度、角加速度曲线图,检验了码垛机运动规律的合理性及准确性,间接地测出了液压缸的输出力、旋转轴转矩、物料与手爪间摩擦力,为液压缸、电机、旋转液压缸的选型以及各传递关键部件的设计提供了理论依据。结果表明,该码垛机方案符合设计要求,能保证机器顺利工作,验证了此设计方案的可行性,为机器的有限元静动态特性分析建立了基础。
4 码垛机的静动态特性分析
4.1静态特性分析
静态特性是考虑在最大外载荷的作用下机构的变形能力,因此只需分析外力作用下几个极限位置[4]的静力性能即可。
4.1.1码垛机整体静态特性分析
将码垛机整体按照要求进行结构简化,然后导入ANSYS Workbench软件中,再借助Static Structure(ANSYS)模块对码垛机进行静力学分析[5-6]。如图16所示,求解得出其最大变形量(Total-Deformation)为0.749 69mm,出现在夹持装置夹持部分,变形量满足低于0.8mm的要求,其平均(vio-Mises)应力最大为43.819MPa,出现在机架和升降框架连接链条的连接件位置以及升降框架横梁中间处,整体刚度和强度满足要求。
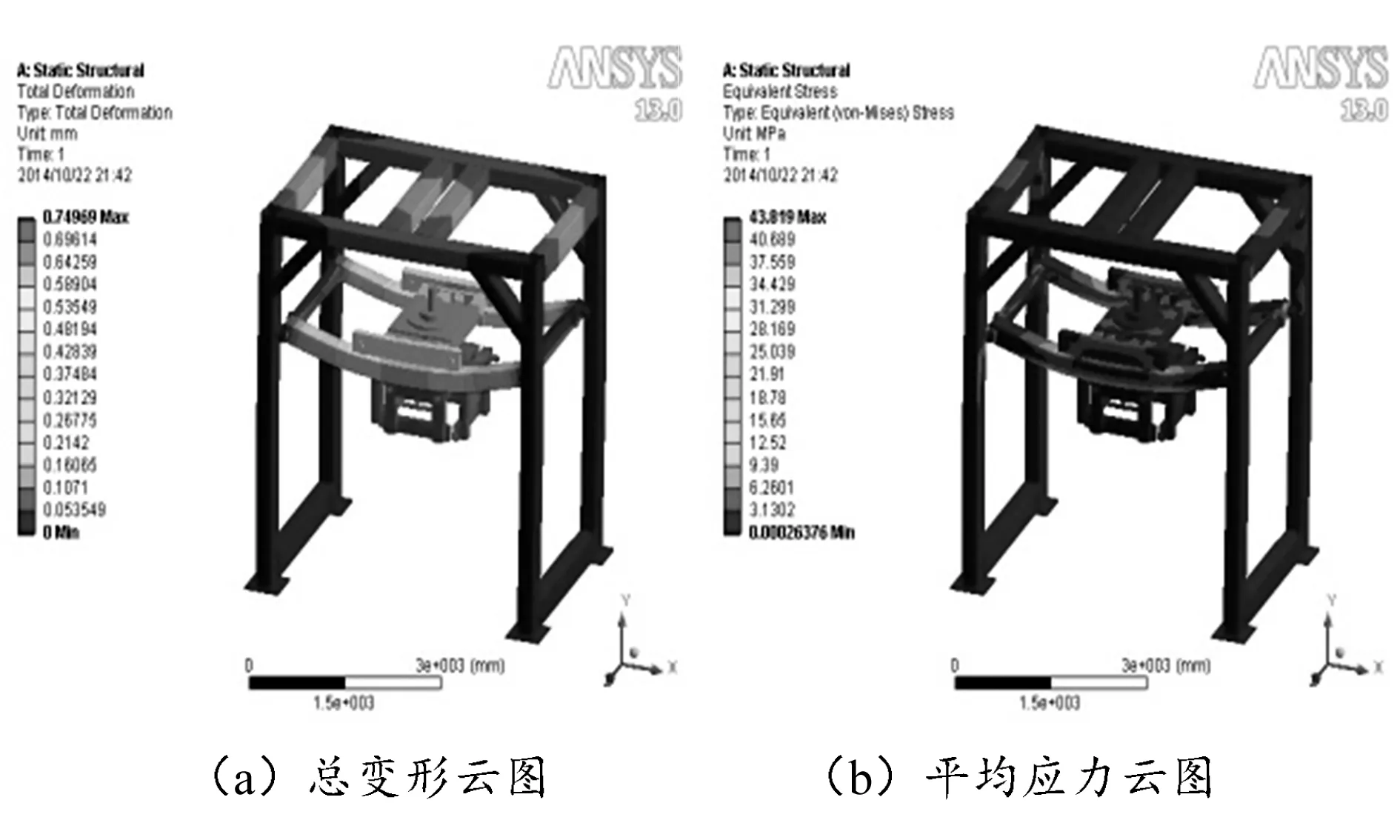
图16 码垛机变形、平均应力云图
4.1.2夹持手爪静态特性分析
将夹持手爪部分进行结构简化并在ANSYS Workbench中进行分析计算,求解得出其最大总变形量(Total -Deformation)为0.261 68mm,出现在夹持手爪夹持板位置处,平均(vio-Mises)应力最大为32.517MPa,出现在夹持手爪导向轴固定板部位,整体刚度和强度满足条件,如图17所示。
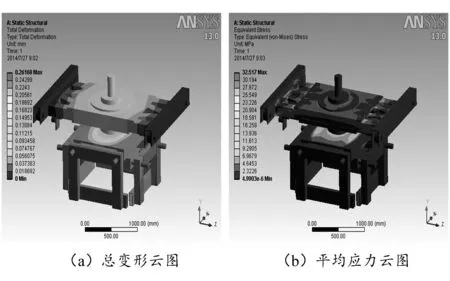
图17 夹持手爪部件总变形、平均应力云图
4.2动态特性分析
在ANSYS Workbench软件中,利用Modal(ANSYS)模块进行分析计算,可以得到该码垛机的模态。设定接触条件为各部件之间绑定接触,约束条件为码垛机机架底面固定约束,模态分析阶数为6阶,前3阶模态振型如图18所示,其6阶模态相应结果见表2。

表2 码垛机固有频率、振幅及相应振型
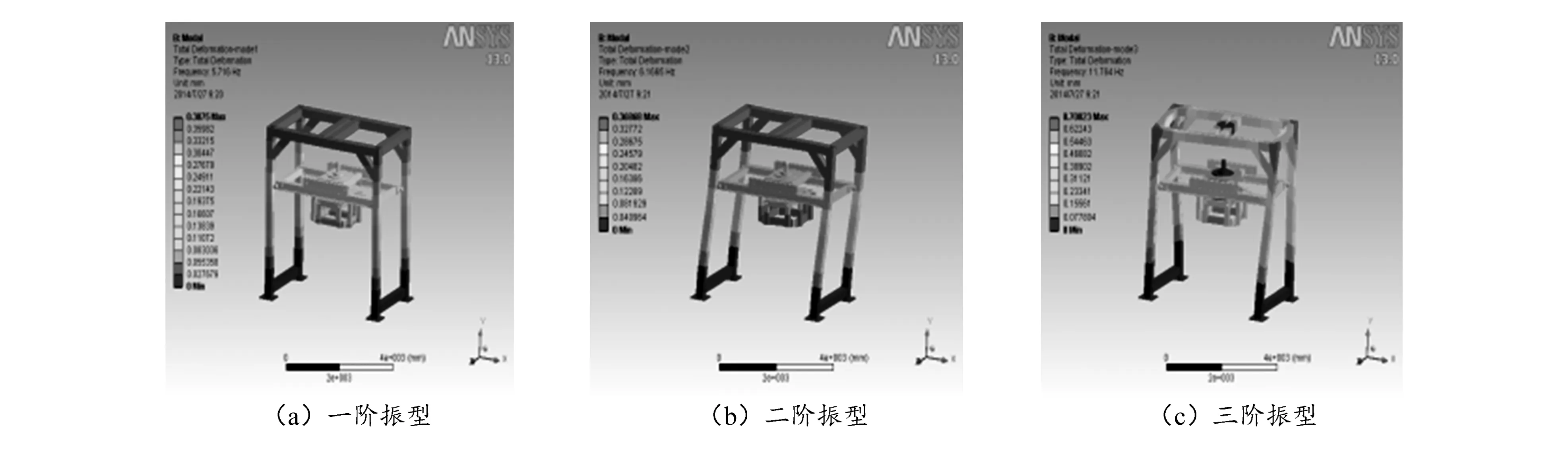
图18 码垛机前3阶模态振型
从表2分析可知,码垛机的不同模态振型都不一样,其各方向振动特性会削弱码垛机的强度和刚度,进而影响码垛机的位置精度。由于横向移动中伺服电机的输出转速为19r/min(0.48Hz),升降电机输出转速为720r/min(12Hz),旋转电机输出转速为2r/min(0.033Hz), 工作状态前3阶振型最大固有频率为11.764Hz,小于电机最大频率12Hz,因此其在电机频率范围之内会引起共振,共振会影响机械结构的使用寿命及工作的稳定性。
4.3整机结构改进
鉴于上述动态特性性能的不足,以及考虑在实际生产中应尽量使机械结构的工作频率避开其固有频率,以免发生共振[7],结合前3阶模态振型结果分析,对整机进行结构改进,改进方案如图19所示,具体改进措施见表3。

图19 整体结构改进最终方案
改进后分析计算得出其前3阶模态振型如图20所示,对应模态相应结果见表4。
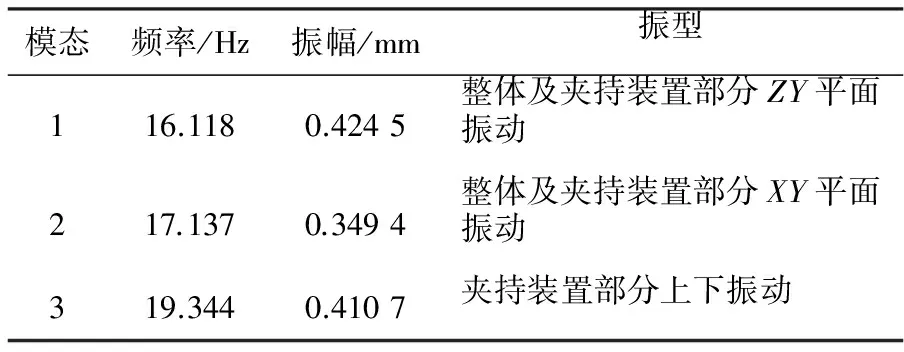
表4 码垛机改进后前3阶固有频率、振幅、振型
由表4得知,码垛机改进后的第一阶频率为16.118Hz,已经远大于各电机工作频率,由此证明改进后的码垛机运动工作中不会引起共振现象,其动态特性良好,提高了整机动态性能,得到了满意的结果。
5 结束语
本文结合ADAMS及ANSYS有限元分析技术对层码垛设备进行设计,通过ADAMS仿真分析,得到了码垛机各关键部件在各个时刻的位移、速度、加速度等曲线图,检验了层码垛设备运动规律的合理性及准确性,同时也为液压缸、电机、旋转液压缸的选型以及各传递关键部件的设计提供了理论依据;最后通过ANSYS有限元分析法对层码垛机设备进行了静动态特性分析,评价了各部分性能并进行了结构改进,使改进后的整体设备固有频率远大于各电机工作频率,避免发生共振现象,改进后得到了满意的结果。将砌块生产线层码垛设备的设计与ADAMS仿真分析及有限元分析技术相结合,可降低生产成本,缩短设计周期,同时也使得砌块生产线层码垛设备的设计更完美、性能更可靠。
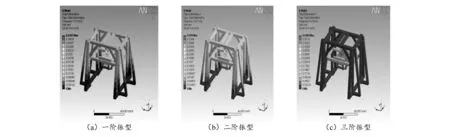
图20 码垛机设备改进后前3阶模态振型
[1] 范锦忠.陶粒泡沫混凝土砌块[J].砖瓦,2009(7):44-47.
[2] 郭艳,李海艳,胡德勇.陶粒加气混凝土砌块性能分析[J]. 新材料与应用,2011(10):90-93.
[3] 陈立平, 张云清, 任卫群,等. 机械系统动力学分析及ADAMS应用教程[M]. 北京: 清华大学出版社, 2005.
[4] 许京荆.ANSYS Workbench13.0数值模拟技术[M].北京:中国水电出版社,2012.
[5] 李兵,何正嘉,陈雪峰.ANSYS Workbench 设计仿真与优化[M].北京:清华大学出版社,2011.
[6] 凌桂龙,丁金滨,温正.ANSYS Workbench 13.0从入门到精通[M] .北京:清华大学出版社,2012.
[7] Chen Y S,Cheng Y D, Liao J J, et al. Development of a finite element solution module for the analysis of the dynamic behaviour and balancing effects of an induction motor system[J]. Finite Elements in Analysis and Design, 2008(44):483-492.
DesignoflayerpalletizingequipmentbasedonADAMSandANSYS
LIU Jiang, QIN Baorong, WANG Shuhua
(Zhejiang University of Technology, Zhejiang Hangzhou, 310014, China)
The ceramsite after molding and cutting can enhance aerated block. These ceramsite need stacker crane to the special area for maintenance. Aiming at this application, it designs a stacker crane equipment combined with its special nature. It establishes the 3d model with Solidworks and determines the stacker crane structure. Using ADAMS, it analyzes this equipment motion simulation and stress, determines a right exercise program for the stacker crane, simulates the layer equipment's overall static and dynamic characteristics by means of ANSYS, evaluates their performance and structure. The design improves the structure, the performance of its dynamic characteristics, obtains the satisfactory results.
stacker crane; block material; motion simulation; stress analysis; static and dynamic analysis
10.3969/j.issn.2095-509X.2014.11.009
2014-11-04
刘江(1989—),男,贵州江口人,浙江工业大学硕士研究生,主要研究方向为机械设计及理论。
TH122
A
2095-509X(2014)11-0038-06
猜你喜欢
冶金设备(2020年2期)2020-12-28
装备制造技术(2020年3期)2020-12-25
重型机械(2020年3期)2020-08-24
重型机械(2020年2期)2020-07-24
工程技术研究(2020年9期)2020-06-20
上海建材(2020年5期)2020-01-04
电子制作(2019年20期)2019-12-04
上海建材(2019年5期)2019-02-15
中国资源综合利用(2016年4期)2016-01-22
石油化工建设(2015年6期)2015-12-01