
基于模糊PID控制的线控转向系统侧向稳定性分析
2014-09-06 01:28:43于蕾艳贠平利鲍长勇伊剑波郑亚军李源泉
山东交通学院学报 2014年1期
于蕾艳,贠平利,鲍长勇,伊剑波,郑亚军,李源泉
(中国石油大学(华东) 机电学院,山东青岛 266580)
基于模糊PID控制的线控转向系统侧向稳定性分析
于蕾艳,贠平利,鲍长勇,伊剑波,郑亚军,李源泉
(中国石油大学(华东) 机电学院,山东青岛 266580)
建立线控转向系统车辆侧向干扰下的非线性三自由度整车动力学模型,研究侧向干扰对汽车操纵稳定性的影响。分析采用PID控制的侧向稳定性控制效果,并采用模糊PID控制对转向电机主动控制。结果表明,线控转向系统中采用模糊PID控制实时整定PID控制参数,可有效提高各种侧向干扰下的整车侧向稳定性。
线控转向系统;侧向稳定性;模糊PID 控制
汽车线控转向(steer by wire,简称SBW)系统的转向电机采用主动控制,实现主动转向,可提高在各种干扰下汽车的操纵稳定性和主动安全性[1]。车辆遇到侧向干扰时保证侧向稳定性是线控转向系统的控制目标之一。文献[2]中转向传动比算法采用模糊控制,研究正常转向工况下转向传动比随车速变化的规律,不需被控对象的复杂模型。文献[3]对前轮转角采用模糊PID 控制,研究转向盘转角正弦输入下汽车的操纵稳定性 ,但没研究在侧向干扰下的控制效果。本文建立线控转向系统车辆侧向干扰下的非线性三自由度整车动力学模型,研究侧风对汽车操纵稳定性的影响,分析采用PID控制的线控转向系统的侧向稳定效果,采用模糊PID 控制对转向电机主动控制,以提高各种侧向干扰下整车的侧向稳定性。
1 侧向干扰对汽车操纵稳定性的影响
1.1侧向干扰下的非线性三自由度整车动力学模型
在原三自由度整车转向模型[4]基础上,考虑质心处的侧向干扰力作用,得到非线性三自由度整车动力学模型为
(1)
(2)
(3)
式中m为整车质量;ms为整车悬挂质量;u为整车质心的纵向车速;β为整车质心处的侧偏角,β=v/u,v为整车质心侧向车速;h为侧倾力臂;φ为车身侧倾角;Fy1、Fy2分别为前、后轴轮胎地面侧偏力,Fy1、Fy2采用魔术公式轮胎模型[5]得到;Fwind为侧向干扰力;Iz为整车绕z轴的转动惯量;Ixz为整车对x、z轴的惯性积;Ix为整车绕x轴的转动惯量;γ为整车横摆角速度;l1为质心到前轴的距离;l2为质心到后轴的距离;g为重力加速度,m/s2;kφ为悬架的侧倾角刚度;Cφ为悬架的侧倾角阻尼。
1.2侧向干扰对汽车操纵稳定性的影响
车辆直线行驶,车速20 km/h,转向盘转角输入为0,前轮转角、整车横摆角速度、质心侧偏角等均为0。图1~4为直线行驶2 s时施加不同大小的侧向干扰阶跃输入(例如侧向风)对前轮转角等的影响。图1表明,侧向干扰引起不期望的前轮转角,且随着侧向干扰力的增加,引起不期望转向的程度加剧。图2表明,侧向干扰引起不期望的整车横摆角速度,且随着侧向干扰力的增加,整车横摆角速度增加,如果驾驶员不能及时纠正干扰引起的转向运动,汽车将失去控制。图3显示了侧向干扰引起整车质心侧偏角的变化情况,图4显示了侧向干扰对车辆行驶轨迹的影响,如果驾驶员不通过转向盘输入进行转向纠正,侧向干扰使汽车偏离原来的直线行驶路线,可引发事故。因此,要保证线控转向系统的车辆遇到各种侧向干扰时保持原有期望的路线行驶,提高汽车的操纵稳定性,必须对转向电机进行主动控制。
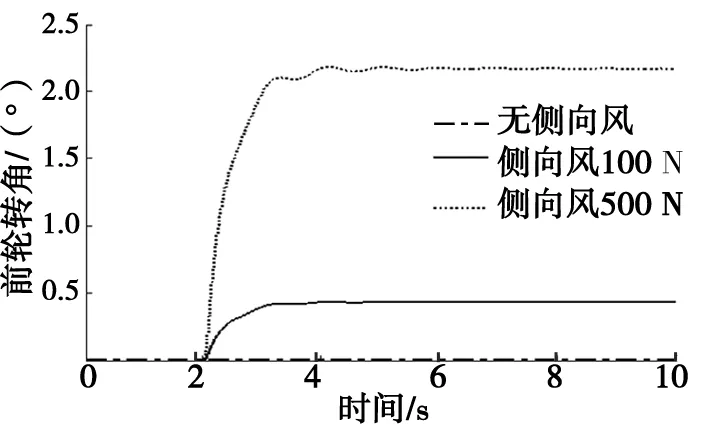
图1 侧向干扰对前轮转角的影响
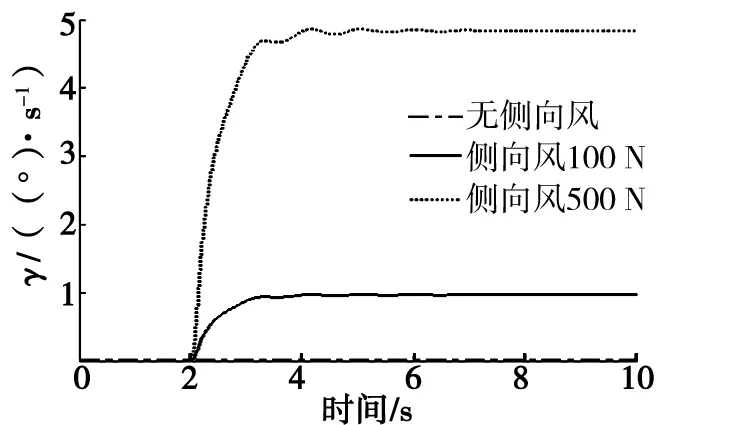
图2 侧向干扰对整车横摆角速度的影响

图3 侧向干扰对质心侧偏角的影响
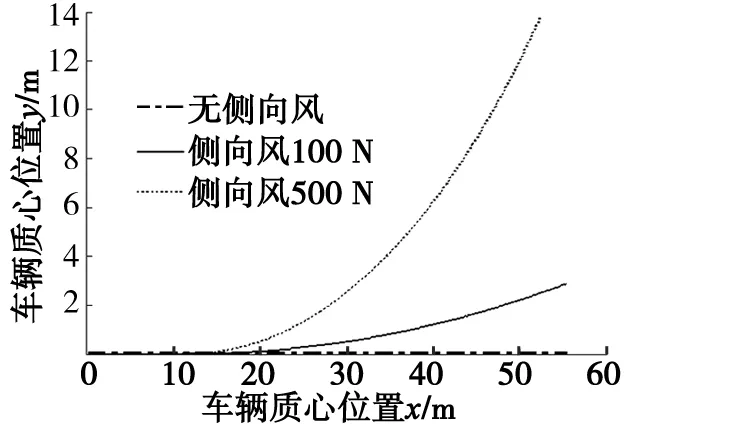
图4 侧向干扰对车辆行驶轨迹的影响
2 基于PID控制的前轮主动转向控制
2.1控制算法
图5为基于PID控制的前轮主动转向控制算法框图。转向盘模块输出的转向盘转角经过转向传动比算法得到目标前轮转角,经过非线性三自由度整车模型计算得到目标横摆角速度。目标横摆角速度与干扰引起的整车实际横摆角速度的偏差经PID控制算法得到转向电机的电流,转向电机力矩驱动前轮转向模块得到实际前轮转角,经过三自由度整车模型(式(1)~(3))得到实际横摆角速度,反馈到转向电机PID控制模块处,构成转向电机电流的闭环控制,实现对于目标横摆角速度的跟踪控制,保障侧向干扰下的整车操纵稳定性。
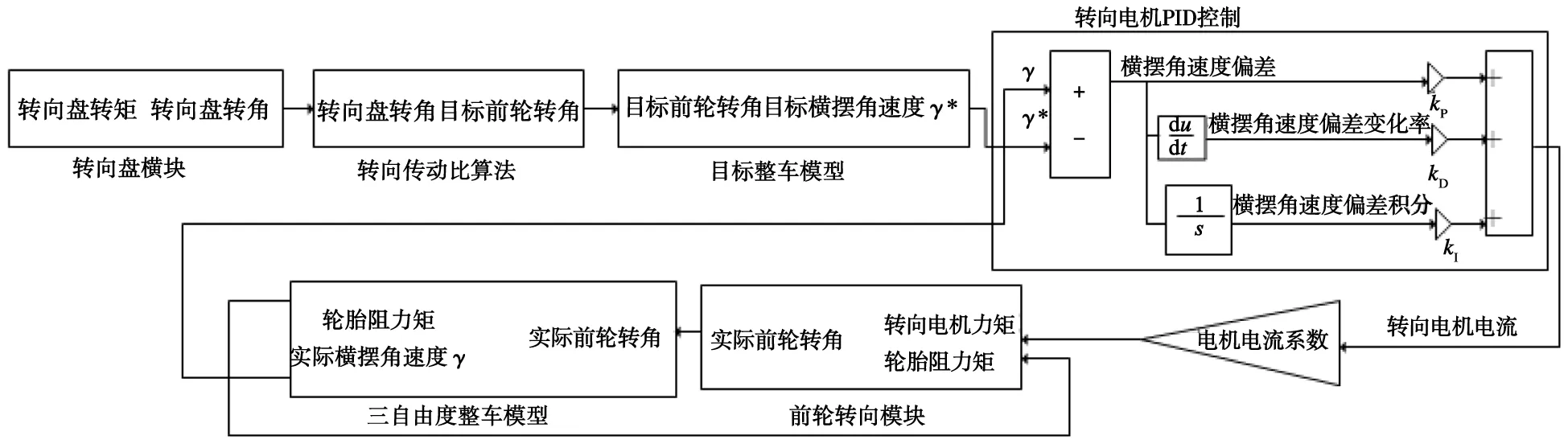
图5 基于PID控制的前轮主动转向控制算法框图
2.2控制效果
不同侧向风干扰下基于PID控制的前轮主动转向控制效果如图6~11所示。PID控制的3个参数按侧向风100 N确定,比例系数kP=1 500,积分系数kI=1 300,微分系数kD=30。图6 为转向电机力矩输出,该力矩驱动前轮转向模块以抵抗侧向干扰的影响。图7 为前轮转角的变化,前轮反向转动,以抵消侧向干扰造成整车状态的改变。图8 为横摆角速度变化,PID控制使车辆实际横摆角速度跟踪目标整车模型所输出的目标横摆角速度,实际横摆角速度收敛,汽车稳定。图9为质心侧偏角变化,PID控制使质心侧偏角变化较小,最后收敛到0。图10 为整车侧倾角变化,整车侧倾较小。图11 为车辆行驶轨迹,车辆基本保持期望的行驶轨迹。以车辆实际横摆角速度与目标横摆角速度偏差的均方根、车辆实际侧向位移与目标侧向位移偏差的均方根作为车辆侧向稳定性的评价指标。侧向风力为100 ,500 N时,车辆横摆角速度偏差的均方根分别为0.02,0.12 (°)/s,车辆侧向位移偏差的均方根分别为0.05,0.25 m。PID控制参数的整定是实现控制目标的关键。
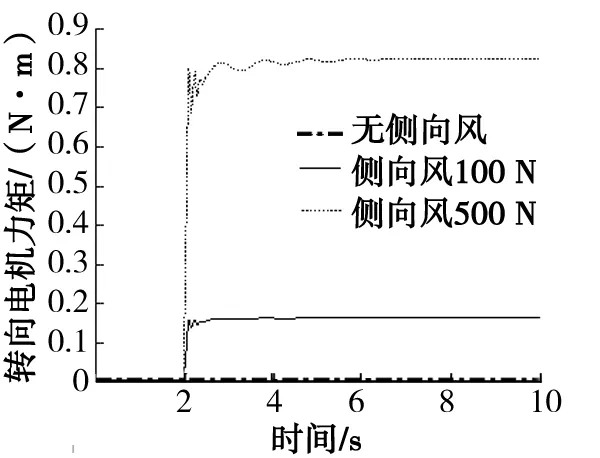
图6 转向电机力矩输出
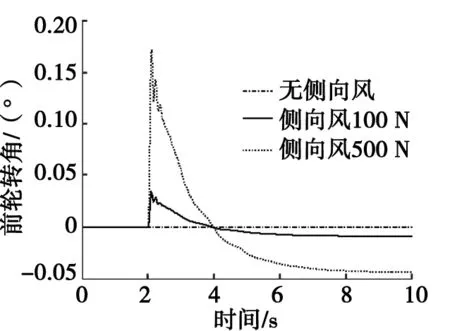
图7 前轮转角变化
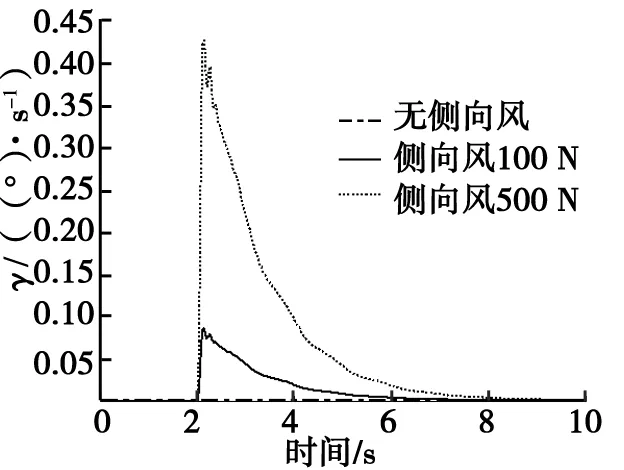
图8 横摆角速度变化
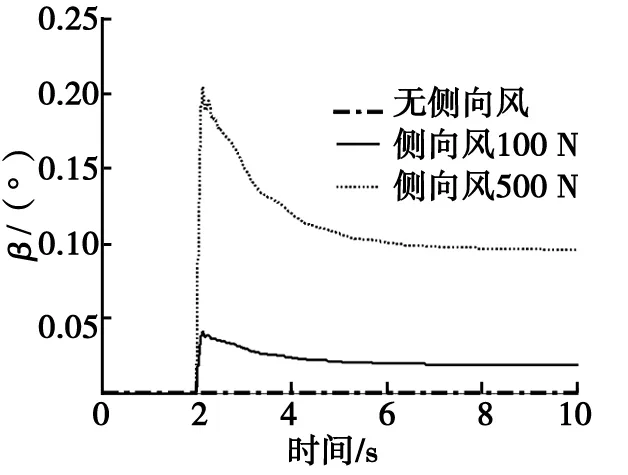
图9 质心侧偏角变化
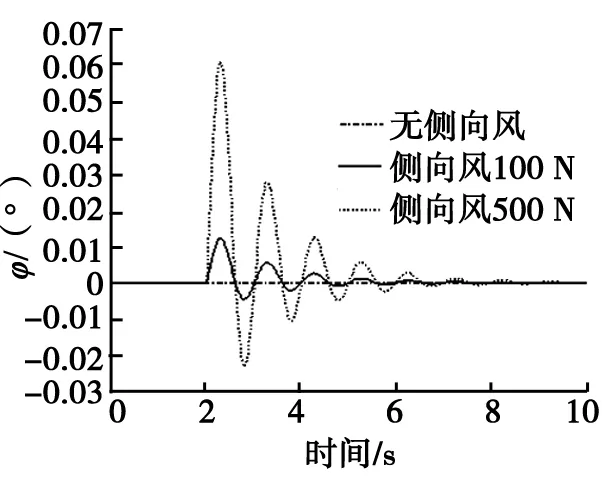
图10 整车侧倾角变化
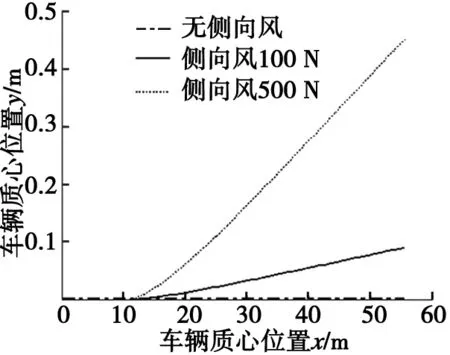
图11 车辆轨迹
图6~11表明,当干扰变化时,采用固定的PID控制参数不能保证较好的抵制侧向干扰而保持侧向稳定性的能力。PID控制应与模糊控制相结合,PID控制参数由模糊控制实时整定。
3 基于模糊PID控制的前轮主动转向控制
基于模糊PID控制的前轮主动转向控制算法与图5类似,而将转向电机PID控制模块改为转向电机模糊PID控制模块,图12所示为基于MATLAB/SIMULINK软件建立的模糊PID算法。模糊控制有2个输入,目标横摆角速度与实际横摆角速度的偏差及偏差的变化率。3个输出为比例系数增量ΔkP,积分系数增量ΔkI,微分系数增量ΔkD。输入与输出均采用三角型隶属度函数。模糊控制整定的PID控制参数用于PID控制,得到转向电机电流、驱动前轮转向模块。采用模糊PID控制时,侧向风力分别为100,500 N,车辆横摆角速度偏差的均方根分别为0.013,0.040 (°)/s,车辆侧向位移偏差的均方根分别为0.04,0.09 m。图13为采用模糊PID控制时的车辆行驶轨迹,与图11采用PID控制时的车辆行驶轨迹对比可知,采用模糊PID控制时线控转向系统的车辆在各种侧向干扰下均可取得较好的侧向稳定性。
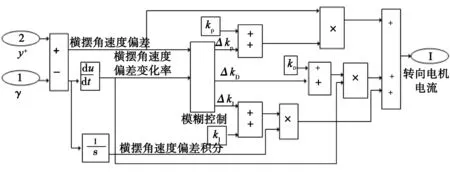
图12 转向电机的模糊PID控制
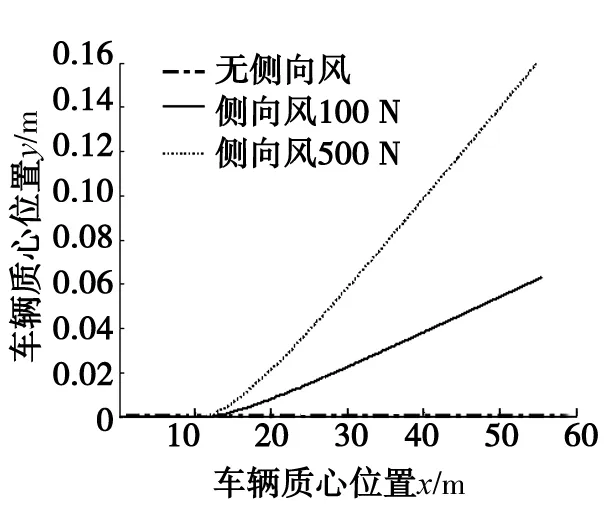
图13 模糊PID控制时的车辆轨迹
4 结论
1)无主动控制的汽车线控转向系统转向时,侧向干扰会引起不期望的车辆横摆角速度等,降低车辆的稳定性。
2)线控转向系统转向电机采用PID控制,可实现一定的横摆角速度控制,但固定的控制参数不能保证在各种干扰下均取得较好的稳定性控制效果。
3)线控转向系统采用模糊PID控制,模糊PID控制算法利用模糊控制实时整定PID控制的比例系数、积分系数、微分系数,在各种侧向干扰下均可取得较好的侧向稳定性。
[1]Weiskircher T, Müller S. Control Performance of a Road Vehicle with Four Independent Single-Wheel Electric Motors and Steer-by-Wire System[J].Vehicle System Dynamics,2012,50(SUPPL.1):53-69.
[2]姚江云,孔峰,吴方圆.线控转向汽车传动比智能控制策略的研究[J].计算机测量与控制,2012,20(3):678-680.
[3]李珊,谭光兴,林川,等.基于模糊PID线控转向系统前轮转角控制[J].广西工学院学报,2012,23(3):56-60.
[4]于蕾艳,贠平利,伊剑波,等.线控转向系统的神经网络模型与模糊控制[J].山东交通学院学报, 2013,21(4):1-5.
[5]郑香美,高兴旺,赵志忠.基于“魔术公式”的轮胎动力学仿真分析[J].机械与电子,2012(9):16-20.
(责任编辑:杨秀红)
OnLateralStabilityAnalysisofSteering-by-WireSystemBasedonFuzzyPIDControl
YULei-yan,YUNPing-li,BAOChang-yong,YIJian-bo,ZHENGYa-jun,LIYuan-quan
(SchoolofElectromechanicalEngineering,ChinaUniversityofPetroleum(ShandongCampus),Qingdao266580,China)
This article establishes a dynamics model with the nonlinear three-degree freedom for the steering-by-wire system vehicle with the lateral disturbances and studies the influence of the lateral disturbances on the vehicle operating stability. Also it analyzes the control effects of the lateral stability by using the PID control and the active control of the steering motor by using the fuzzy PID control. The results show that the fuzzy PID control can adjust the real-time PID control parameters and effectively improve the vehicle lateral stability under various lateral disturbances.
steering-by-wire system; lateral stability; fuzzy PID control
2013-09-29
中央高校基本科研业务费专项资金资助项目(11CX04039A);国家留学基金资助项目([2013]3018);青年教师教学改革项目(QN201319)
于蕾艳(1980—),女,山东烟台人,中国石油大学副教授,主要研究方向为车辆动力学与控制.
10.3969/j.issn.1672-0032.2014.01.002
F253.9
A
1672-0032(2014)01-0004-04
猜你喜欢
汽车纵横(2022年10期)2022-10-28 03:16:12
汽车纵横(2022年9期)2022-09-15 05:26:58
汽车纵横(2022年9期)2022-09-15 05:26:58
装备制造技术(2021年4期)2021-08-05 07:39:40
电子制作(2018年9期)2018-08-04 03:31:12
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
中国铁道科学(2015年4期)2015-06-21 06:46:06
农机使用与维修(2014年11期)2014-11-18 01:32:07
