质子磁力仪传感器线圈参数的研究与设计*
2014-09-06 10:48:03王应吉刘珈言
传感技术学报 2014年11期
王应吉,刘珈言,于 雷,林 君
(地球信息探测仪器教育部重点实验室,吉林大学仪器科学与电气工程学院,长春 130061)
质子磁力仪传感器线圈参数的研究与设计*
王应吉,刘珈言,于 雷,林 君*
(地球信息探测仪器教育部重点实验室,吉林大学仪器科学与电气工程学院,长春 130061)
线圈是质子磁力仪传感器的核心,其品质直接影响着仪器的测量精度。结合反向串联圆柱体线圈模型,对约束设计的因素进行分析;建立约束参数与设计参数之间的联系;利用Matlab对参数公式进行图形化处理,结合实际情况进行设计,并给出一组满足约束参数条件的优化设计参数V=250 cm3,d=0.9 mm,r=2.5 cm,h=0.72 cm;最后对传感器进行地磁场测量实验,测量值波动较小,结果稳定,进行异常体探测时,探测结果能够准确反映异常趋势。
传感器;线圈;约束参数;设计参数;图形化
质子磁力仪是一种地球物理弱磁测量仪器,可以测量地磁场总场强度,以其简单的结构、稳定的信号、较高的精度、较好的可靠性、适中的价格以及方便携带等特点在能源勘探、空间探测、军事领域以及科研领域等都有着广泛的应用。其根据拉莫尔进动原理研制而成,通过测量传感器线圈中感应到质子旋进信号的频率即可计算得到地磁场[1],信号频率f与地磁场磁感应强度Be满足
Be=23.4874f
(1)
随着现代电子技术和控制技术的发展,质子磁力仪的集成化、自动化程度越来越高,系统测量精度也显著提升。现在世界各国开发各种型号质子磁力仪,如美国的G856T、加拿大的GSM-19T、捷克PMG-1以及中国的WCZ-3、CZM-5、PM-2等,这些仪器不仅性能指标优越,而且外围功能丰富,GSM-19T已经加入GPS导航、实时显示观测磁场剖面图、可程序化的基点站观测等功能。随着DSP、ARM、FPGA技术不断应用,质子磁力仪发展将进入新阶段[2-3]。然而仪器系统至关重要的传感器部分研究进展却相对缓慢,对传感器线圈的设计始终缺少系统的理论分析方法和完善的设计步骤。传感器接收信号的质量直接影响探测结果,而影响信号的因素很多,如激励磁场大小、线圈匝数、线圈体积、填充系数等,本文将从理论与实际相结合的角度,对传感器线圈参数进行研究,完成线圈设计。
1 理论模型约束因素分析
质子磁力仪传感器线圈通常采用对称圆柱体反向串联线圈模型[4],如图1所示。
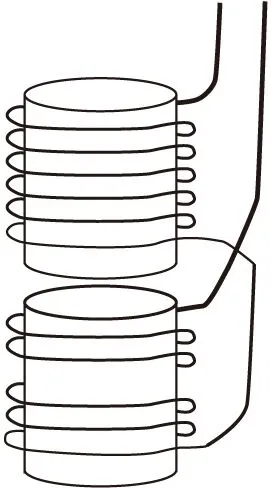
图1 线圈模型
这种连接方式可以有效抑制外界干扰。图中两个线圈的参数(电感、电阻、匝数等)近似相同,所以采用单一的圆柱体线圈模型进行分析。
在实际设计过程中,为了得到更好的设计结果,许多约束设计的因素需要考虑,例如信号初始幅值e0、信噪比SN、激励磁场磁感应强度B、线圈电阻R和电感L等。
1.1 信号初始振幅e0和信噪比SN
质子旋进信号初始振幅e0和信噪比SN是约束设计的最基本因素,其直接表征信号质量的优劣。e0和SN越大,信号质量越好,系统测量信号频率越稳定,得出的磁场精度越高,但同时对设计要求越苛刻。在满足系统要求的条件下限定一个下限进行设计。信噪比直接影响着测量值的精度,如表1所示。

表1 信噪比与系统测量误差
若设计质子磁力仪测量精度为0.1 nT到1 nT,由表1可知信噪比达到50即可,但是由于质子旋进信号的衰减特性,设计留有一定裕量,选取信噪比为100,同时信号初始振幅e0不小于1微伏[4-5]。
1.2 激励磁场磁感应强度B
根据质子磁力仪的基本原理,需要建立磁感应强度B≥75 mT的激励磁场对溶液中的质子进行极化。对于一个有限长厚度不可忽略的空心圆柱体线圈来说,内部磁场分布十分复杂。借助有限元分析软件Comsol对上述圆柱体线圈模型磁场进行仿真,结果如图2所示。
圆柱体轴线位于z轴,中心位于原点o,图中所示为激励磁场磁感应强度轴向和径向切面分布图,右侧色条由蓝到红表示强度逐渐增加,由仿真结果可知,对固定的z值(右),随着r值变化,螺线管内部磁感应强度在轴线r=0处最小,越靠近管壁越大,但变化不明显,中心点与侧壁处的磁感应强度比值约为1∶1.02;对固定的r值(左),随着z值变化,在螺线管内部磁感应强度先增大后减小,在中心z=0处最大,在线圈端口z=0.5l处最小,l为线圈轴向长度,磁感应强度比值约为1∶0.75。综上所述,以线圈轴线上磁场分布近似代替线圈内部磁场分布进行分析可以使整个磁场区域满足设计要求。
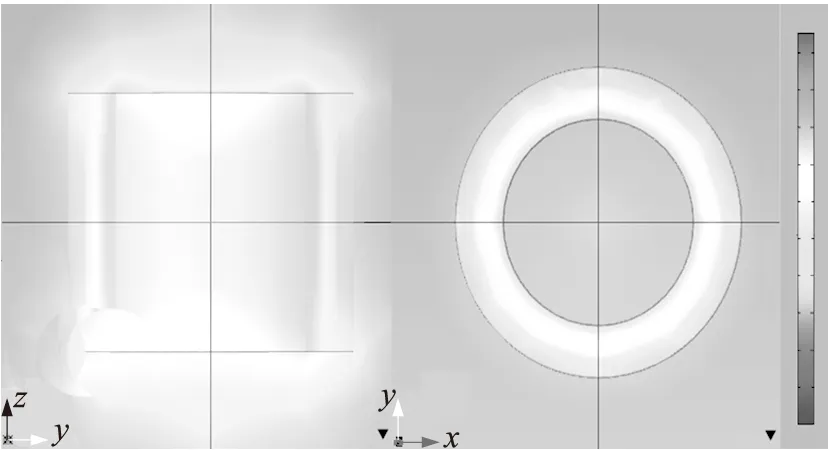
图2 激励磁场磁感应强度分布
1.3 线圈电阻R
线圈的电阻是约束线圈设计的另一个因素,在电压不变的情况下,线圈电阻直接影响着激励电流,从而影响激励磁场。为了降低仪器功耗,在保证激励磁场强度的前提下,激励电流越小越好,控制在1安培左右。电阻的第二个影响是线圈的信噪比(本体信噪比,不考虑外界干扰的影响)。
如前所述,设计质子旋进信号初始振幅在1微伏左右,为了保证信噪比为100,噪声不高于10纳伏,考虑到前置放大器本体噪声和线圈本体噪声相近,所以设计线圈的本体噪声不高于5纳伏,由式(2)可计算出对应的电阻值[4]。式中考虑到频率变化对线圈阻值的影响,2 kHz时线圈电阻阻值比直流阻值大20%左右[4],k为玻尔兹曼常数,T为温度,取300 K,Δ为带宽,取100 Hz,计算得R=12.5 Ω。

(2)
另外,电阻上存在焦耳热损耗,会使信号衰减加快,理论上电阻越小越好,但受到实际情况限制,设计在10 Ω左右即可[5]。
1.4 线圈电感L
电感是储能元件,会对能量释放造成延迟,在一定时间内电感的能量未释放到一定程度,不仅会影响信号质量,而且可能对前置放大器造成损坏。磁力仪通常利用导通电阻低且反向击穿电压高的场效应管来实现线圈通电极化与快速关断控制。
通电期间线圈电流受到电感的影响以指数形式上升,经过一段时间后维持稳定,此时线圈形成稳定激励磁场。在关断时刻线圈瞬间的感应电压超过场效应管的反向击穿电压,因此场效应管处于击穿导通状态,线圈两端电压维持恒定,此时线圈两端相当于并联了一个电压源,等效模型如图3所示。
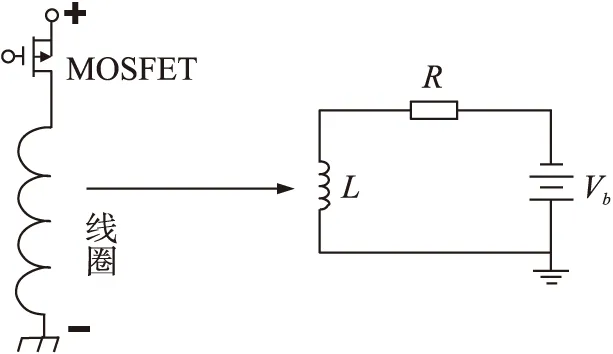
图3 关断期间极化电路等效模型
模型时域电流表达式

(3)
式中Vb为场效应管反向击穿电压,I0为关断时刻线圈电流,令I(t)=0求解可得衰减时间
(4)
由式(4)可知,衰减时间与线圈电感、电阻、稳态电流及场效应管反向击穿电压有关。关断后要求电流迅速衰减到零,但实际上电流衰减需要一定时间,为了使信号质量更好,要求整个衰减时间小于拉莫尔旋进周期[6-7]。令Vb=100 V,I0=1.2 A,R=10 Ω,忽略其他影响因素,计算得出电感值L≤35 mH,可设计在30 mH左右。
2 约束参数与设计参数的函数关系
为了进行分析与设计,需要将约束参数与设计参数关系用数学形式表示,其中约束参数为线圈电感L、线圈电阻R、激励磁场磁感应强度B和信号初始振幅e0,而设计参数为线圈内半径r、线圈厚度h、线圈柱体体积V和线径d。
首先将线圈模型建立在柱坐标系中,线圈轴线位于z轴,中心位于原点o,如图4所示。

图4 柱坐标系线圈模型
图中l为线圈轴向长度,l0为线圈半轴向长度,r为线圈内半径,h为线圈厚度。设单位长度线圈匝数n=d-1,线圈平均半径rm=r+0.5h,以下公式未给出单位,本文均以SI国际标准单位制为准。
2.1 电感参数
有限长多层空心圆柱体线圈的电感[8]
(5)

L=4πVh2d-4kn×10-7
(6)
其中:

2.2 电阻参数
有限长多层空心圆柱体线圈的电阻
(7)
其中:lw=2πrmN,Sw=0.25πd2,ρ为漆包线电阻率,lw为漆包线总长度,Sw为漆包线截面积,将式(7)中的变量统一整理为r、h、V、d,可得在设计参数影响下的电阻
(8)
2.3 激励磁场磁感应强度参数
如前所述以轴线磁场代替有限长空心圆柱体线圈内部磁场分布,其磁感应强度为[8-10]

(9)
其中:

μ0为真空磁导率,I为激励电流,r2为线圈外径,r1为线圈内径。从式(9)可知,轴线磁场分布随z而变化,为简化设计并更客观反应磁场效应,以轴线中心点处磁感应强度B(0)和填充系数η[4-5,11]乘积的形式表征激励磁场,其综合磁感应强度
B0=η·B(0)
(10)
将式(10)中的变量统一整理为r、h、V、d,可得在设计参数影响下的激励磁场磁感应强度

(11)
其中:

η=e-1.42(r+0.5h)/l
E为供电电源电压,设计时取12 V。
2.4 信号初始振幅参数
在传感器溶液中的质子形成稳定的合成磁矩,激励磁场消失后,质子磁矩绕地磁场旋进,在直角坐标系下建立旋进模型,如图5所示。
图5 直角坐标系质子旋进运动模型
图中M0是平衡条件下溶液中的质子合成磁矩
M0=χH0V
(12)
式中χ为质子顺磁化率,H0为激励磁场磁场强度。
在y轴方向放置线圈,地磁场方向沿z轴,则质子旋进时线圈中的磁感应强度
B=μ0M0sinθe-t/T2sin(ω0t+φ)
(13)
其中T2为横向弛豫时间,φ为初始相角,线圈的匝数为N,线圈柱体截面积为S,则通过线圈截面的磁通量Φ=NBS,所以线圈中所感应的旋进信号

(14)
e0为质子旋进信号的初始振幅,将变量统一为参数r、h、V、d,单位统一为国际标准单位制,简化整理可得在设计参数影响下的信号初始振幅[12]
e0=k0NSB0Vω0sinθ
(15)
θ为线圈轴向与地磁场间的夹角,一般为使信号最大,取θ=90°,将B0带入式(15),整理可得
(16)

3 参数影响图形化分析及线圈设计
为了实现线圈设计,需要分析设计参数r、h、V、d变化对约束参数L、R、B、e0的影响,根据影响选取设计参数以满足约束参数的要求。
由于涉及变量多且关系复杂,采用Matlab软件进行参数关系图形化处理,直观分析设计参数对约束参数的影响。分别以r、h作为一组变量,V、d作为另一组变量对式(6)、式(8)、式(11)、式(16)进行Matlab成图,考虑实际设计情况,对参数范围做如下限定:
r→1 cm~5 cm、h→0.5 cm~1 cm
V→100 cm3~500 cm3、d→0.5 mm~1 mm
以r、h为变量时,取V=250 cm3、d=0.8 mm;以V、d为变量时,取r=2.5 cm、h=0.8 cm。图6~图13为Matlab对参数L、R、B、e0图形处理结果。
由图6和图7可知,L随r增大而减小;随h增大而增大;随V增大而增大;随d增大而减小。
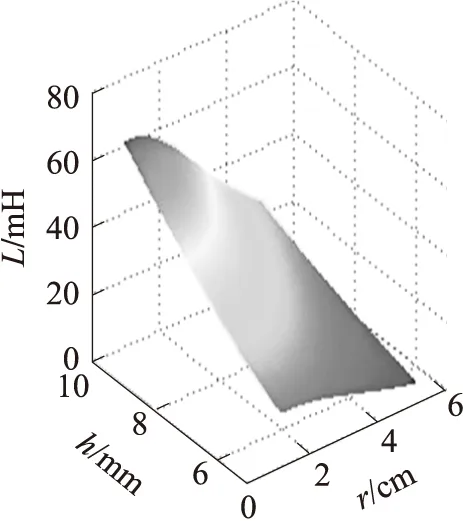
图6 r、h对L的影响
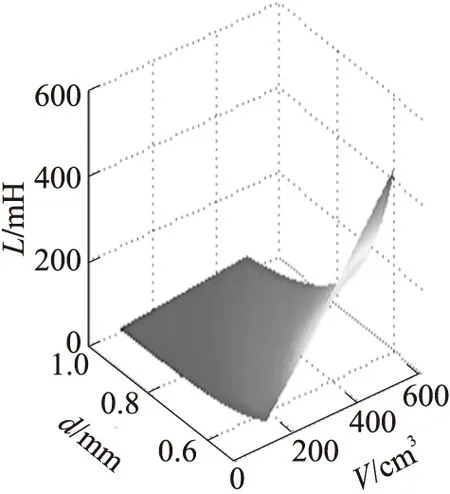
图7 V、d对L的影响
由图8和图9可知,R随r增大而减小;随h增大而增大;随V增大而增大;随d增大而减小。
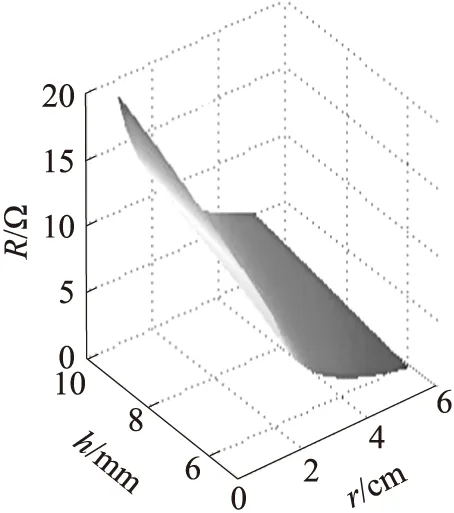
图8 r、h对R的影响

图9 V、d对R的影响
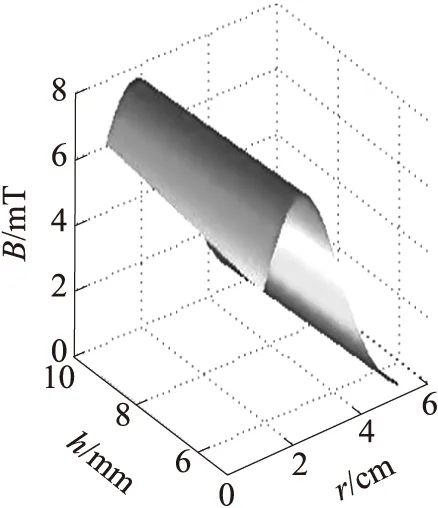
图10 r、h对B的影响
图11 V、d对B的影响
由图10和图11可知,B随r增大先增大后减小,中间有峰值;随h增大基本不变;随V增大先增大后减小,中间有峰值;随d增大而增大。
由图12和图13可知,e0随r先增大后减小,中间有峰值;随h增大而增大;随V增大而增大;随d增大保持不变。

图13 V、d对e0的影响
图12 r、h对e0的影响
将约束参数L、R、B、e0随设计参数r、h、V、d的变化规律以符号的形式表示,如表2所示。
表2 设计参数变化影响
注:+增大,-减小,±有峰值,=无影响
由于涉及的参数多且参数关系复杂,设计不能同时满足所有参数条件,所以从重点参数入手,进行参数匹配设计。实际设计时体积参数是主要制约因素,先选定体积参数,再由上述的参数影响规律实现设计,设计步骤如下:①选定体积V,由B、e0与r的关系可以确定r,r取值使B和e0在峰值点附近;②在V和r确定后,由于d不对e0产生影响,所以由e0的约束确定h的取值;③调整d使L、R大体满足约束条件,在设计时注意留一定裕量;④微调各设计参数,使设计达到最佳效果。
如上所述,选取体积V=250 cm3进行设计,设计结果如表3所示。由于实际设计时漆包线线径d与理论设计有偏差,所以理论设计时d选取大一些,而实际使用的线径标称值稍小,对电阻和电感造成一定影响,设计时需要考虑。
表3 理论设计与实际设计参数对比
4 实验测试
依据表3方案,分别设计传感器线圈S1、S2,并使用CZM-2型及自制JLUPPM-I型磁力仪进行测试。
①地磁场测量。在同一地点分别使用CZM-2、JLUPPM-I配合S1、S2进行地磁场重复测量,分别测量10次,结果如图14所示,测量值在54 524 nT上下波动,与当地地磁场一致,图上侧列出测量结果的均值avg和标准差std,测量结果稳定,重复性较好。
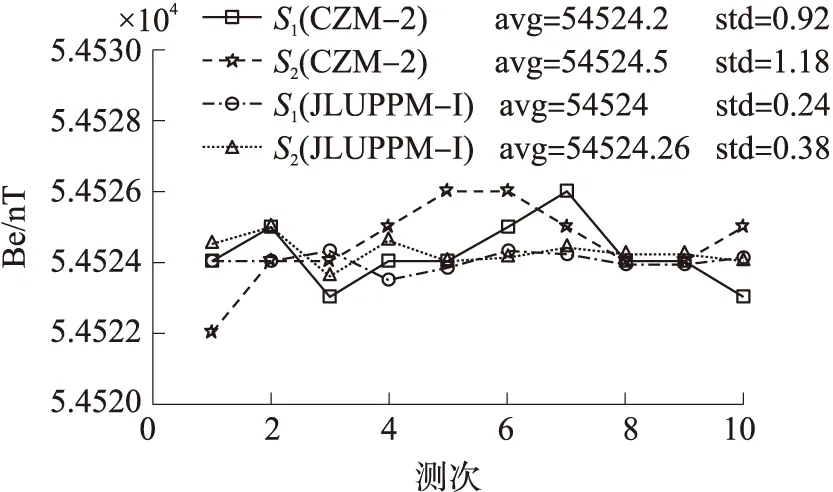
图14 地磁场测量
②异常体探测。使用JLUPPM-I配合S1、S2以面包车为异常体进行探测,在距车体10 m之外的一条平行测线上取11个点,点距2 m,如图15所示,由图可知S1、S2的探测曲线基本重合,两次探测均能很好地反映异常体周围磁场变化,探测结果稳定。
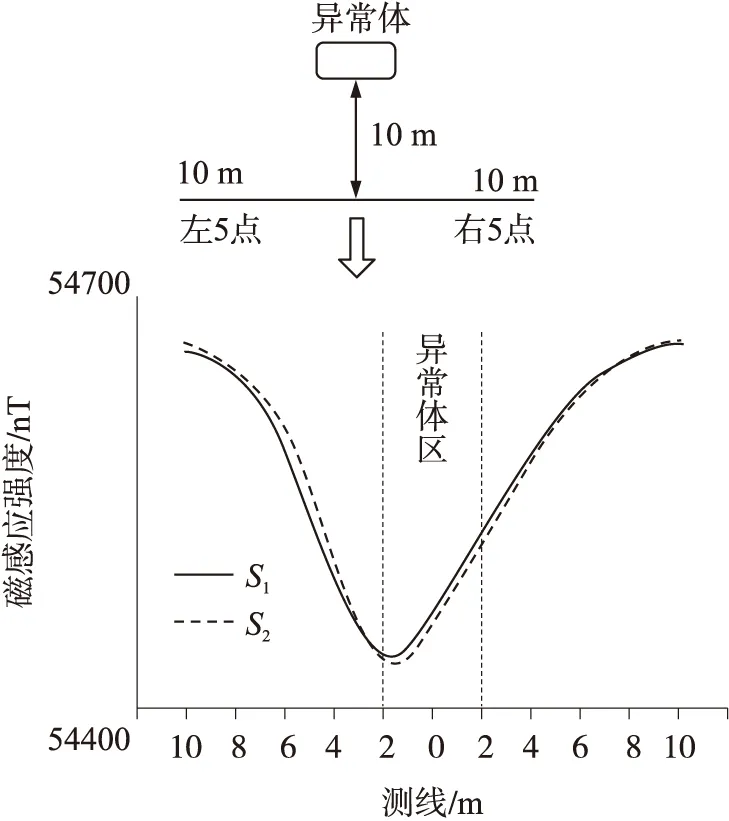
图15 异常体探测
5 总结
本文首先研究约束线圈设计的参数范围;其次分析约束参数与设计参数关系,推导两者的函数关系式;接着利用Matlab对参数关系进行图形化处理,分析参数影响并形成线圈设计方法;然后结合实际情况进行线圈参数匹配设计,并给出一组满足约束参数条件的优化设计参数V=250 cm3、d=0.9 mm、r=2.5 cm、h=0.72 cm;最后对传感器进行地磁场测量实验,测量值波动较小,结果稳定,进行异常体探测时,探测结果能够准确反映异常趋势。通过线圈参数的理论研究,建立系统的传感器线圈分析与设计方法,为线圈的优化设计及改进提供依据。
[1] James Lenz,Alan S Edelstein. Magnetic Sensors and Their Applications[J]. Sensors Journal,2006,6(3):631-649.
[2]刘迪仁. 高精度智能质子磁力仪的最新发展[J]. 电子制作,2013(15):219.
[3]周前伟. 基于DSP的质子旋进磁力仪设计与实现[D]. 吉林:吉林大学电子科学与工程学院,2014:1-3.
[4]Koehler J A R. Proton Precession Magnetometers[M]. Revision 3,Comox,BC,Canada,2012:1-52.
[5]Ruhunusiri W D S,Jayananda M K. Construction of a Proton Magnetometer[J]. Proceedings of the Technical Sessions,2008,24:78-85.
[6]Xiao Ping,Zhang Shuang,Chen Shudong. The Analysis of the Polarization Circuit to Proton Precession Magnetometer[J]. International Conference on Industrial Control and Electronics Engineering,2012:505-508.
[7]任庆辰. 质子旋进磁力仪电路设计[D]. 吉林:吉林大学电子科学与工程学院,2012:5-22.
[8]Hollos S,Hollos R. Signals from the Subatomic World:How to Build a Proton Precession Magnetometer[M]. America:Exstrom Laboratories LLC,Abrazol Publishing,2008:21-24.
[9]丁健. 有限长厚壁载流螺线管的磁场分布[J]. 大学物理,2009,28(6):12-14.
[10]王华军. 螺线管中磁场的计算[J]. 四川轻化工学院学报,1999,12(4):23-25.
[11]Faini G,Svelto O. Signal-to-Noise Considerations in a Nuclear Magnetometer[J]. Suppl al Vol.23,Serie 10 del Nuovo Cimento,1962:55-65.
[12]Waters G S,Francis P D. A Nuclear Magnetometer[J]. Signals Research and Development Establishment,1958,35:88-93.
[13]吴峻,樊树江. 抑制电磁干扰的悬浮间隙传感器检测线圈结构设计[J]. 传感技术学报,2010,23(1):24-27.
[14]Tatsuya Y,Takenori O,Shoji H. Thermal Noise Calculation Method for Precise Estimation of the Signal-to-Noise Ratio of Ultra-Low-Field MRI with an Atomic Magnetometer[J]. Journal of Magnetic Resonance,2012:100-108.
[15]万云霞,王言章,程德福. 感应式磁传感器标定磁场处理方法研究[J]. 传感技术学报,2013,26(4):520-524.
[16]Ripka P,Janosek M. Advances in Magnetic Field Sensors[J]. IEEE Sens J,2010,10(6):1108-1116.

王应吉(1956-),男,吉林大学教授,研究方向为电磁测量技术,核磁共振地下水测量,wangyingji1321@sina.com;

刘珈言(1989-),男,吉林大学工学硕士,liujyfeng@126.com。
ResearchandDesignoftheProtonMagnetometerSensorCoilParameters*
WANGYingji,LIUJiayan,YULei,LINJun*
(Lab of Geo-Exploration and Instrumentation Ministry of Education of China,College of Instrumentation and Electrical Engineering Jilin University,Changchun 130061,China)
The coil is the core of proton magnetometer’s sensor,the quality of which directly affects the accuracy of the instrument measurement. Combined with the reverse series connection cylinder coil model,we analyze the factors which restrict design,and establish contact between every limiting parameters and design parameters,then do graphics processing to the parameters formula using Matlab,design the various parameters of the coil in consideration of the actual situation,and give a group of optimal design parameters which satisfy the limiting parameters conditions,V=250 cm3,d=0.9 mm,r=2.5 cm,h=0.72 cm. Finally do the tests in measurements of the geomagnetic field and the results are good. When detecting the abnormal body,the results can accurately reflect abnormal trend.
sensor;coil;limiting parameters;design parameters;graphical
项目来源:国家重大科学仪器设备开发专项项目(2011YQ030133);科技部科技创新工作方法项目(3B810Z950537)
2014-07-13修改日期:2014-09-22
10.3969/j.issn.1004-1699.2014.11.012
TP212.1;TH762.3
:A
:1004-1699(2014)11-1506-06
猜你喜欢
地震地磁观测与研究(2023年3期)2023-10-19 08:23:36
河南科技(2022年22期)2022-12-26 00:12:19
舰船科学技术(2022年21期)2022-12-12 08:07:00
中学生数理化·自主招生(2022年11期)2022-05-30 00:07:26
国际放射医学核医学杂志(2020年4期)2020-07-27 01:53:28
高中数理化(2016年19期)2016-11-14 08:02:48
地质装备(2016年1期)2016-03-10 09:05:28
太空探索(2014年6期)2014-07-10 13:06:11
地质装备(2013年2期)2013-12-11 05:48:28
物理与工程(2013年3期)2013-03-11 16:04:35