
The Research of Gyroscope Based on Mirror Triply periodic Photonic Crystal Heterostructures*
2014-09-06 12:26:13PENGPengWENTingdunXULipingTANGShuai
传感技术学报 2014年1期
PENG Peng,WEN Tingdun,XU Liping,TANG Shuai
(1.Department of Physics,North University of China,Taiyuan 030051,China; 2.The Center of Micro/Nano Technology,North University of China,Taiyuan 030051,China; 3.National Key Laboratory for Electronic Measurement Technology,North University of China,Taiyuan 030051,China)
The Research of Gyroscope Based on Mirror Triply periodic Photonic Crystal Heterostructures*
PENG Peng1,3,WEN Tingdun1,2,3*,XU Liping1,TANG Shuai1,3
(1.Department of Physics,North University of China,Taiyuan 030051,China; 2.The Center of Micro/Nano Technology,North University of China,Taiyuan 030051,China; 3.National Key Laboratory for Electronic Measurement Technology,North University of China,Taiyuan 030051,China)
Theoretical study aboutmirror shows,in the actual application range,transmissivity has a simple linear relationship with the axial stress to photonic crystal.When micro-mechanical gyroscope works,there will be Coriolis force emerge which is in direct ratiowith angular speed of thewhole system.At the root of the detection beam of gyroscope,mirror triply periodic photonic crystal is used as the sensing element.Detecting the transmissivity of the photonic crystal,the Coriolis force to the gyroscope can be calculated,and then the acceleration of the gyroscope can be found.It is shown that this structure can measure 6.5 m gnwhen the transmissivity intensity changes one out of ten thousand and itsmeasuring range is up to 55 gnby ANSYS software simulation.
photonic crystal;micro-mechanical gyroscope;coriolis force;transmissivity;electromagnetic drive;elastic coefficient;Meso-piezoptic
MEMS陀螺(即微机械陀螺)是MEMS技术在惯性传感器领域,继微机械加速度计之后的又一项重大突破[1]。由于在硅材料的基础上制作转子比较困难,因此现有的微机械陀螺绝大多数都是振动式陀螺,其工作原理都是基于Coriolis效应实现驱动和检测模态之间的能量转移[2],即转动坐标系中的物体会受到与速度方向垂直的惯性力的作用,这一惯性力即为Coriolis力。Coriolis力与转动角速度成正比,可以通过检测Coriolis力得到转动系统的转动角速度[3]。微机械陀螺作为一种MEMS器件,有体积小,质量轻,功耗低,价格便宜,可大批量生产等优点,一上市就受到了大家的青睐[4]。
现有的微机械陀螺有很多种,从驱动方式上来区分,有静电驱动,电磁驱动,压电驱动等。从检测方式上来看,有压阻检测,电容检测,压电检测和光学检测[5]等。本文介绍的微机械陀螺仪,其驱动方式为电磁驱动,检测方式为介观压光式检测。光子晶体作为介质的周期排列而构成的一种人工微结构材料[6],在轴向应力的作用下,晶体材料受压时发生的应变会使其折射率发生相应的变化[7-8],通过光强分析仪检测出的透射光强,即可得到Coriolis力的大小,继而实现对转动角速度的测量。
1 陀螺的工作原理及力学方程
振动式陀螺的工作原理都是基于Coriolis力,Coriolis力描述了由角速度产生的出现在与角速度正交方向上力的关系FC=2m(Ω×v)。等号左边FC为Coriolis力大小,右边为角速度和质量块线性运动速度的矢量积。当速度和角速度正交时Coriolis力最大,并垂直于速度和角速度所组成的平面方向。产生的条件为,先给质量块M提供一个线性速度v,然后给整个系统输入一个角速度Ω,Coriolis力才能出现。
图1是振动式微机械陀螺工作原理的基本模型。这个振动系统有两个相互垂直的振动模态[9-10]:一个是质量块沿x方向的振动,为驱动模态;另一个是质量块沿y方向的振动,为检测模态。这两个模态的固有频率分别是ωx和ωy。工作时,驱动力以驱动频率ωd驱动质量块沿x方向振动,当系统绕z轴以角速度Ω转动时,沿y轴就出现了Coriolis力,检测Coriolis力就能知道角速度Ω。
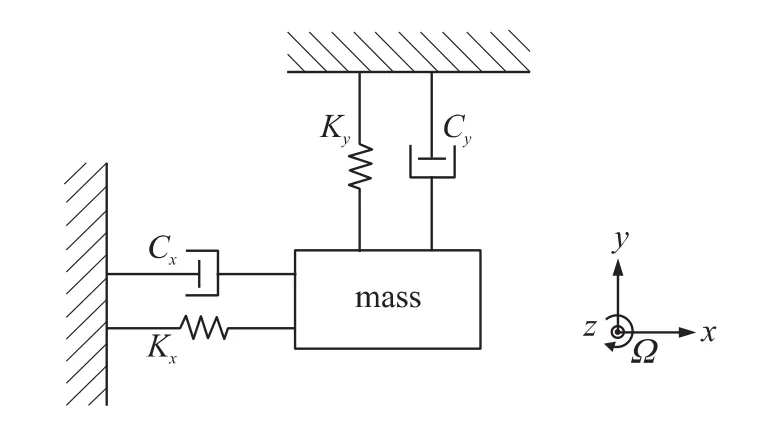
图1 微机械陀螺的基本模型
先在x方向外加驱动信号,使质量块在x方向往复运动。令x方向驱动力信号:

式中F0为驱动力的幅值,ωd为驱动力的角频率。当系统绕z轴以角速度Ω转动时,质量块受到y方向的Coriolis力:

陀螺在驱动模态(x方向)和检测模态(y方向)的运动可以由下面的动力学方程描述:

其中式(3)的解为:

式中:

式(5)中的第1项是随时间指数衰减的瞬态解,第2项为稳态解。如果振动模态的阻尼比很小,瞬态解的作用会需要较长的时间才能消失。一般情况下,只需要考虑稳态解。质量块在x方向的运动方程便可以简化为:

将式(8)代入式(4),得到

解微分方程(9),得到质量块在y方向上的运动方程,也包括瞬态项和稳态项:

式中:
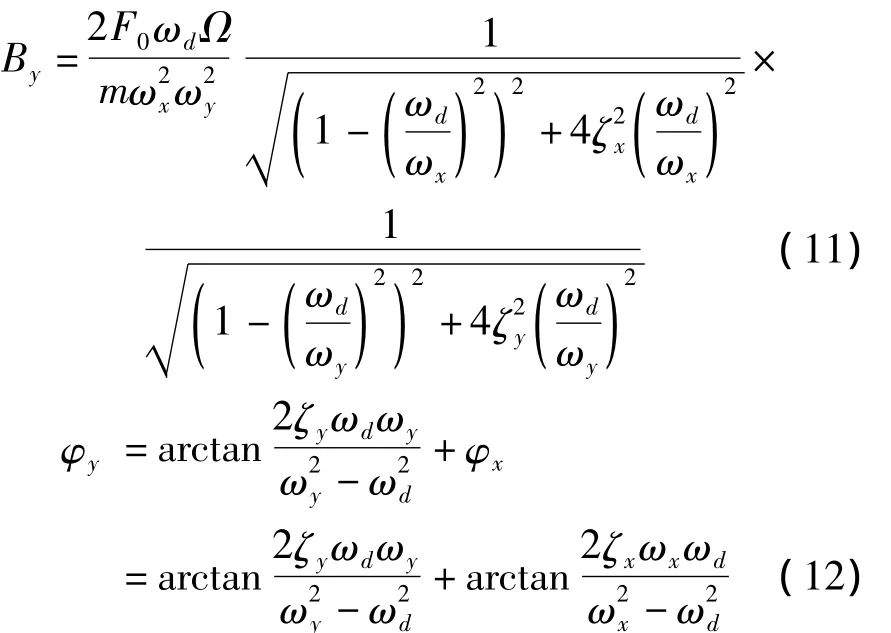
从式(11)可以看出,质量块在检测方向的稳态振幅By与角速度Ω成正比,这样测量角速度的问题就通过Coriolis效应转变成为测量振幅大小的问题。
由式(2)和式(8),可以得到Coriolis力的表达式:

继而知道Coriolis加速度[11]的表达式为:

2 陀螺的结构设计
微机械陀螺仪的结构如图2所示,外边框起固定作用,分析受力时可暂时不予考虑,图示为边框内侧机械结构,由对称的4部分组成,每1部分包含两个驱动梁和一个检测梁。驱动梁和检测梁上制作有驱动导线和敏感元件,驱动导线在磁场中通上驱动电流,在安培力的作用下驱动质量块,使之沿X轴做反复振动。当整个系统沿Z轴有角速度Ω输入时,检测梁在Coriolis力作用下沿Y方向振动,此时放置在检测梁上的敏感元件就会由于受到形变而产生应力的变化,变化量与角速度信号有一定关系,则可以通过找出应力的变化来得到系统在Z方向上的角速度大小。
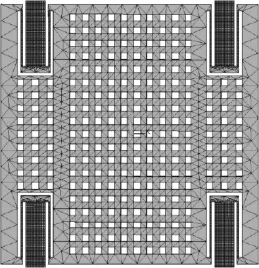
图2 微机械陀螺的示意图
取检测梁的长、宽、高分别为L、b、h,其质量相对于质量块可以忽略不计,把质量块视为刚体,可认为Coriolis力作用在质量块的质心位置上。
根据工程力学理论,检测梁上距梁根部x位置上的点受到的应力为:

由于该结构有4个检测梁,所以上式又可以写成

其中Fc为质量块受到的Coriolis力。
显然x=0时,即位于梁根部的点受到的应力最大,即:

对应的,梁根部产生的最大应变量为:

式中E为材料的杨氏模量。
在本设计中选用GaAs材料,其杨氏模量E= 85.5 Gpa,泊松比为0.31,密度为5.32 g/cm3。
综合考虑灵敏度、固有频率、阻尼等因素影响,设计结构参数为:检测梁和质量块的长、宽、高为500μm×30μm×10μm和2 400μm×2 400μm× 80μm,则质量块实际体积为4.602×108μm3,经过计算质量块的质量m=2.448×10-3g。
3 陀螺的结构仿真
对微机械陀螺进行ANSYS仿真分析,忽略阻尼孔的影响,陀螺的有限元仿真模型如图3所示。

图3 有限元仿真模型
工作平面定义为XY平面,驱动方向为X方向,输入角速度方向沿着Y方向,则在Z方向上可检测出Coriolis力,即Coriolis加速度。当陀螺受到Z方向的加速度作用,质量块会向着其相反的方向运动。在敏感元件正常工作方向上加满量程加速度300 gn进行求解,得到Z方向位移分布如图4所示,图5为各模态的分析图,可知该陀螺满足检测的需求。

图4 Z向位移分析云图

图5 模态振型图
4 镜像异质三周期光子晶体的光学特性
镜像异质三周期结构光子晶体由A、B、C 3层薄层组成,并且3层又整体以N个周期的方式对称交替排列生长具有镜像对称结构。该晶体结构置于空气中,其中A、B、C薄层由两种晶体材料TiO2和SiO2(折射率分别为n1=2.29和n2=1.45)作为组成A、B、C层的基础构成介质。
不考虑材料的色散,且不考虑光学厚度,则光子晶体ABC满足每层的光程为1/6波长。即:n1da1= n2da2=λ1/6,n1db1=n2db2=λ2/6,n1dc1=n2dc2=λ3/ 6其中λ1、λ2、λ3为禁带中心波长。取λ1=1 000 nm、λ2=800 nm、λ3=600 nm,3层介质的总循环周期数N=10。暂不考虑偏振问题,根据传输矩阵理论,计算此光子晶体的透射系数和透射率,用MATLAB仿真的结果如图6所示。
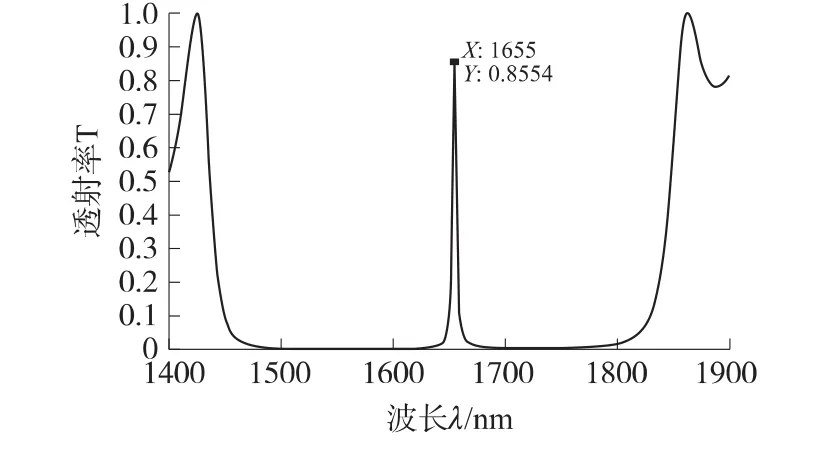
图6 镜像异质三周期结构光子晶体局域态透射峰
从图中可以看出,这种结构的光子晶体在1 400 nm~2 000 nm的波长范围内形成一个明显的光子禁带,其波段为1 490 nm~1 760 nm。由于镜像异质三周期光子晶体的对称性,使其在光子晶体中出现了一个缺陷态,形成了一个光子局域态,图示可知为一个以1 655 nm为中心波峰的透射峰,透射峰波段为1 630 nm~1 680 nm。
对此结构为(ABC)N(CBA)N的镜像异质三周期光子晶体,当均匀施加轴向应力(Z轴方向)时,光子晶体发生弹性应变。将晶体的拉伸应变近似看成线性变换变化,取有效弹光系数Pe=0.5,得到1 655 nm处缺陷态透射峰随应变的变化关系由图7可以看出,可以发现随着应变从万分之一到万分之一百变化,透射峰的透射率发生剧烈的减小。对于这种介观纳米数量级,光子晶体中光子局域态透射峰随应变而发生剧烈变化的力光耦合现象,我们称之为介观压光效应。
从图7中还可以看出,当有效弹光系数Pe从0.1到0.9逐渐增大时,缺陷态透射峰的减小速度随之增大,运用这一点可以为超灵敏传感器的设计提供理论依据。

图7 不同有效弹光系数Pe下的1 655 nm透射峰的透射谱线
为了更好衡量介观压光效应的强弱,我们在此引入介观压光系数,即表示光子局域态透射峰的透射率随应变发生变化的剧烈程度,如图8所示,以一阶直线拟合求出直线的斜率,并用它表示介观压光系数ρ,由此得到透射率T和应变ε的关系式:

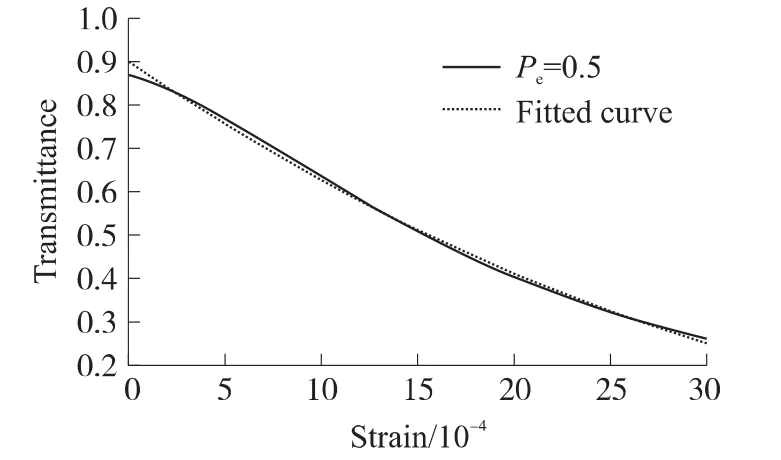
图8 介观压光系数的拟合
5 陀螺的模型分析和计算
从本质上讲,微机械陀螺的检测部分,就是一个用于检测Coriolis加速度的加速度计,利用介观压光原理替代压敏电阻原理来检测Coriolis加速度,将检测梁上加上镜像异质三周期光子晶体。由于梁长远大于梁宽和高,所以当有Coriolis力产生时,近似认为只在检测梁长度上产生了应变量。
利用式(13)、式(14)、式(17)、式(18),整理得出Coriolis加速度、输入角速度与透射率的关系式:
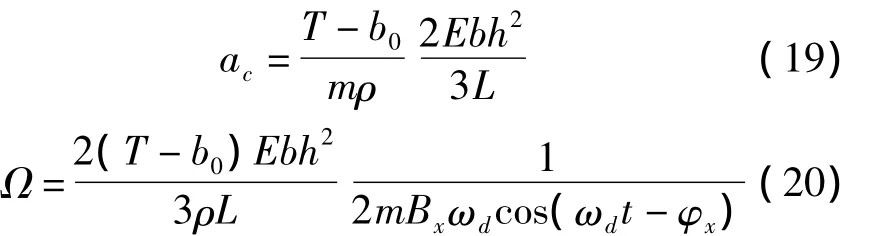
图8中,Pe=0.5,其介观压光系数和节点分别为ρ=-216和b0=0.8554,计算陀螺检测部分的测量范围及检测精度。
当光强分析仪检测发现透射率T=0.8553,即透射光强发生万分之一的变化时,由式(21)得到产生的Coriolis加速度为:

当透射率T=0,即没有光强透过该光子晶体时,对应的测出Coriolis加速度的最大值为:

由于透射率和角速度具有一定的正比关系,经过设计的陀螺,代入各参数,便可以通过透射率的变化得到输入角速度的大小。调整陀螺的结构,保证工作其工作频率符合设计要求的情况下,也可以得到不同灵敏度的陀螺。
6 结论
利用镜像异质三周期一维光子晶体在光子禁带中存在的光子局域态透射峰,通过对此晶体施加的轴向应力可以改变缺陷态透射峰的透射率,并且两者在一定范围内呈简单的线性关系。以此种光子晶体作为敏感元件,可以感知万分之一透射光强改变量条件下的6.5 m gn的Coriolis加速度测量,测量量程可达55 gn,进一步可以实现对角速度的测量。这种结构具有超灵敏和测量频带宽的特性,可以为微机械陀螺仪以后的设计研究提供思路。
[1]李孟委,刘俊,刘韶轩,等.基于介观压阻效应的新型微陀螺仪结构设计与优化[J].测试技术学报,2009,23(6):519-525.
[2]陈永.基于滑膜阻尼效应的音叉式微机械陀螺的研究[D].中科院上海微系统所,2004-7/2009-7-1.
[3]蔡兆云,柯冠岩.MEMS微陀螺研究与发展述评[J].国防科技,2008,29(1):7-10.
[4]陈雪萌.一种压阻式微机械陀螺的研究[D].中科院上海微系统所,2005.6.
[5]迟晓珠,崔健,闫桂珍.MEMS陀螺振动特性试验技术[J].传感技术学报,2008,21(4):559-562.
[6]冯瑞婷,李俊漾,温廷敦,等.基于镜像异质三周期光子晶体介观压光效应的加速度传感器[J].传感技术学报,2013,26(8): 1073-1077.
[7]李娇,温廷敦,许丽萍.异质双周期结构光子晶体光学特性[J].发光学报,2012,33(3):304-308.
[8]Yang Yang,Xu Liping,Wen Tingdun.The Effectof Uniaxial Stress on Optical Transmission Properties of One-Dimensional Photonic Crystals with a Mirror Symmetry[J].Integrated Ferroelectrics,2012,136(1):105-109.
[9]Sangjun Park,Jongpal Kim,Donghun Kwak,et al.A New Isolaion Methed for Single Crystal Silicon MEMS and Its Application to ZAxis Microgyroscope[C]//IEDM’03,969-972.
[10]Jongpal Kim,Sangjun Park,Donghun Kwak,et al.Robust SOIProcess without Footing and Its Application to Ultra High-Performance Microgyroscopes[J].Sens Actuators A,2004,114:236-243.
[11]Jongpal Kim,Sangjun Park,Donghun Kwak,et al.An x-Axis Single-Crystalline Silicon Microgyroscope Fabricated by the Extended SBMProcess[J].J-MEMS,2005,14:444-445.

彭鹏(1988-),男,汉族,党员,安徽省安庆人,山西省中北大学物理学系硕士研究生在读,主要从事介观晶体传感器的研究设计。具备扎实的专业基础知识,较为系统的掌握了物理、材料、等学科领域的理论和技术。在校期间获得多项奖学金和荣誉称号,pengzhw@sina.com;

温廷敦(1957-),男,山西省浑源县人,博士生导师,研究方向为介观物理学及其应用、光电子技术与仪器、工程材料物理学等方面,先后主持参与多项国家级科研项目,tdwen@nuc. edu.cn。
基于镜像异质三周期光子晶体的陀螺仪研究*
彭鹏1,3,温廷敦1,2,3*,许丽萍1,汤帅1,3
(1.中北大学理学院,太原030051;2.中北大学微米纳米技术研究中心,太原030051; 3.中北大学电子测试技术国家重点实验室,太原030051)
对镜像异质三周期光子晶体的研究理论表明,在实际应用范围内,透射率与光子晶体所受的轴向应力呈简单的线性关系。微机械陀螺仪在工作时会产生Coriolis力,其与整个系统的输入角速度有正比关系。在陀螺仪检测梁的根部,用镜像异质三周期光子晶体作为敏感元件,只需检测出其透射率,即可知道陀螺仪所受Coriolis力的大小,继而求出系统的角速度。ANSYS软件仿真结果表明,当透射光强改变万分之一时,该结构可以感知6.5 m gn的Coriolis加速度的变化,测量量程可达55 gn。
光子晶体;微机械陀螺;Coriolis力;透射率;电磁驱动;弹光系数;介观压光效应
V241.5
A
1004-1699(2014)01-0053-05
2013-10-25修改日期:2013-12-03
C:11440;11464
10.3969/j.issn.1004-1699.2014.01.010
项目来源:国家自然科学基金项目(60776062,50730009),国家自然科学基金仪器专项基金项目(61127015)
猜你喜欢
中国眼镜科技杂志(2018年13期)2018-08-11 06:06:10
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
云南师范大学学报(自然科学版)(2015年5期)2015-12-26 12:46:16
中国铁道科学(2015年4期)2015-06-21 06:46:06
中央民族大学学报(自然科学版)(2015年2期)2015-06-09 08:45:26
激光与红外(2015年11期)2015-03-23 06:07:32
物理实验(2015年10期)2015-02-28 17:36:52
建筑材料学报(2014年6期)2014-03-11 17:08:59
计算物理(2014年1期)2014-03-11 17:00:48
- 传感技术学报的其它文章
- Improved DV-Hop Location Algorithm Based on Hop Correction*
- Gravity Matching Method Based on Artificial Bee Colony Algorithm with Restriction and MHD*
- A LightWeight Fault-Tolerant Event Detection Method in Wireless Sensor Networks*
- RSSI-Based Differential Correction Least-Squares-Quasi-Newton Positioning Algorithm*
- Com prehensive Study on the Problem of Mobile Sink Path Planning and the Cluster Head Node Selecting in WSN Data Collection
- The Experimental Study of the Microsphere Cavity for the Angular Velocity Sensor System*