
The Design of Digital Magnetometer Based On Magnetic Resistance Sensor*
2014-09-06 12:25SUNLisenYUEFengyingLIYonghongWANGEnhuai
传感技术学报 2014年1期
SUN Lisen,YUE Fengying,LIYonghong,WANG Enhuai
(College of Information and Communication Engineering,North University of China,Shanxi030051,China)
The Design of Digital Magnetometer Based On Magnetic Resistance Sensor*
SUN Lisen,YUE Fengying,LIYonghong*,WANG Enhuai
(College of Information and Communication Engineering,North University of China,Shanxi030051,China)
In order to obtain real-time accurate magnetic parameters using Honeywell HMC1001 uniaxialmagnetic resistance sensor and HMC1002 biaxialmagnetic resistance sensor,aminiaturization digitalmagnetometer was designed based on AD7734 and C8051F410.By using constant current source circuitand setting circuit the disorder of sensors and the impact of drift can be effectively solved.This paper expounds the system hardware design and software flow.Digitalmagnetometer was tested,overall accuracy is better than 5‰,the test results verify the feasibility of the design.
measurement;magnetoresistive sensor;constant current source circuit;setting circuit
随着电子学和地球物理学以及计算机技术等科学的快速发展,地磁探测技术得到了越来越广泛的应用[1-4]。目前,国内外的地磁测量系统趋向于小型化和数字化,被广泛的应用于对弹体飞行姿态的测量中[5-8]。但存在精度不高、受温度影响大、分辨率低、成本大等问题。故提出了一种新的设计方法,本系统选用AD7734模数转换器、C8051F410单片机和Honeywell公司的HMC1001型与HMC1002型磁阻传感器[9]进行设计,采用恒流源供电,以实现综合测量精度优于0.5%的性能要求。
1 系统测量原理
地磁场是一个平均磁感应强度约为50 000 nT~60 000 nT的弱磁场,地磁强度随地域的变换而不同。对于磁阻传感器,不外加磁场时,磁阻的电流密度矢量一般呈直线状,当磁场垂直加在磁阻表面时,由于霍尔效应,电流密度矢量与电场方向偏离了一定角度(霍尔角),电流经过的路程改变,电阻值变化。Honeywell磁阻传感器内部是由4个磁阻组成的惠斯通电桥。在电桥上施加一个偏置磁场,使得两个同向放置的电阻的磁化方向朝着电流方向转动,引起电阻阻值增加。同理,另外两个反向放置的电阻阻值减小。当有供电电流在电阻中流过时,电桥的输出电压会随磁场的变化而变化,由此可实时地获取磁场强度。
2 系统硬件电路设计
该系统由Honeywell公司生产的H1001型和H1002型磁阻传感器、置位电路、信号调理电路、AD转换电路、电源电路、微控制器和串行通信电路组成。系统框图如图1所示。
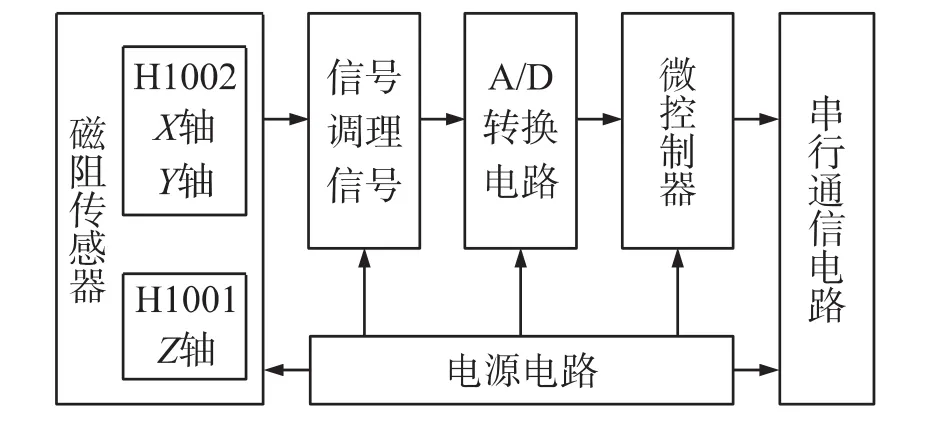
图1 系统框图
2.1 信号调理电路设计
系统采用Honeywell公司的HMCl001单轴磁阻传感器和HMCl002双轴磁阻传感器采集地磁数据。磁阻传感器HMC1001与HMC1002经过放大电路输出3路模拟信号,但磁阻传感器的输出大约为30 mV,输出的模拟量为毫伏级,信号较小,采用OPA184仪表放大器对模拟信号进行放大。在实际地应用中,HMC1001和HMC1002磁阻传感器会受到强磁场的干扰影响,导致输出信号地衰变,传感器元件的磁阻内部会分成若干方向随机的磁区域,从而导致灵敏度衰减。置位电路快速有效地解决了这一问题。置位脉冲电流的峰值电流高于最低要求电流,该脉冲电流通过置位电路带产生一个强磁场,该磁场可以重新使磁区域对准到一个方向上,从而将磁阻传感器迅速地恢复到高灵敏度状态。置位电路电压采用+20 V供电。选用MAX662芯片和ZTX605型三极管设计置位电路,信号调理电路如图2所示。2.2微控制器与AD转换电路设计
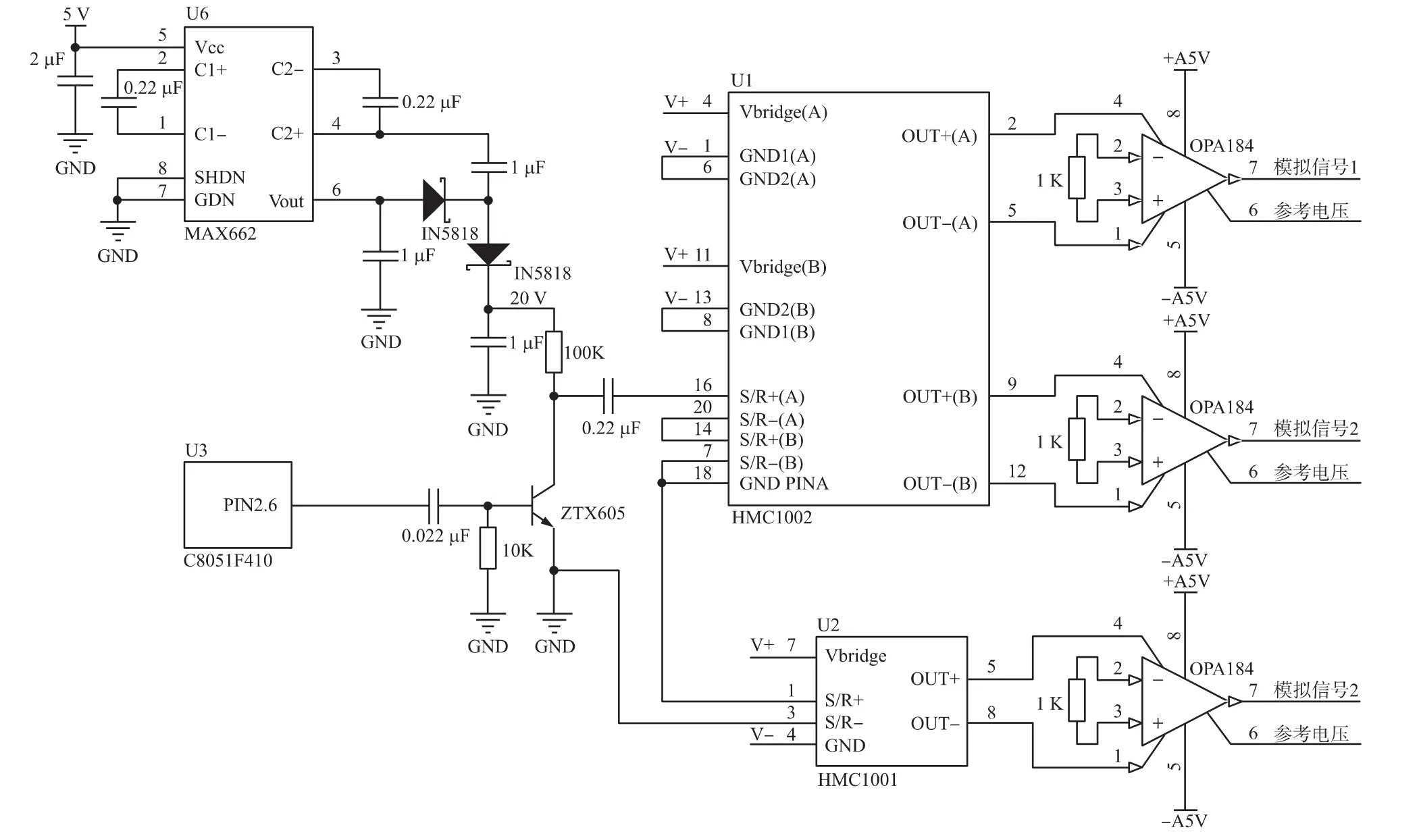
图2 信号调理电路
选用C8051F410单片机对整个系统进行控制,采用AD7734进行模数转换,该芯片具有最高24 bit无失码性能,实现最高12.3 kHz的转换速率。该芯片模拟前端具有4个单端输入通道,采用5 V单模拟电源供电时,可接受最高10 V的单极性或真双极性输入范围。
单片机与AD7734通过标准SPI接口进行通信,设计采用4线制的主、从方式,单片机为主、AD7734为从,单片机经过SPICLK管脚向AD7734提供SPI的时钟信号,SPIMOSI为单片机输出端,SPIMISO为单片机接收端。AD7734的RDY管脚与单片机的P0.3管脚相连,当AD7734完成模数转换以后,的RDY管脚会变为低电平,通知单片机可以通过DOUT管脚读取数据。图3是AD7734与C8051F410的SPI串行通信接口原理图。

图3 AD7734与C8051F410接口示意图
2.3 电源电路设计
本设计用P沟道增强型场效应管设计的恒流源作为传感器的电源激励。从而减小电源自身的工作噪声对器件的干扰,减小磁阻传感器自身的温度漂移。选用通用运放μA741和集成三端可调稳压器TL431设计恒流源电路,恒流源电路原理图如图4所示。
电流经过采样电阻转换为采样电压。采样电压经运放U5反向放大后作为反馈电压Vf送入运放的同相端,与基准电压Vr进行比较,对栅极电压进行调整,从而对输出电流进行调整,使整个闭环反馈系统处于动态平衡中,以达到稳定输出电流的目的。利用运放的虚短虚断及相关的公式,可以推导出Vr与Id的关系:

图4 恒流源电路
Id分别表示由于基准电压、电阻R1,R2,R的不稳定对恒流源产生的影响。由于采样电阻值很小,反馈网络电阻值很大,因此影响输出电流稳定度的主要因素是电压基准源的稳定度和采样电阻的温度系数。
可见输出电流只和电阻R,R1,R2,Vr有关,与场效应管的参数无关。只要选择合适的电阻和基准源,就能实现恒流。本设计基准电压采用集成三端可调稳压器TL431,温度系数为30×104/℃,输出阻抗为0.2Ω,低噪声、工作电流1 mA至100 mA。采样电阻采用高精度金属壳散热式电阻,它具有体积小、精度高、功率大等优点,阻值为0.4Ω。由于采样电阻的阻值与标称值有一定的误差,因此在反馈电阻上串联一个高精度的可调电阻用来对反馈电压进行微调,使输出电流保持在预定值。
3 软件设计
数字式磁强计上电后首先进行初始化,包括对微控制器的初始化和对AD7734的初始化,本系统采用单片机内部振荡器,系统时钟频率为24.5 MHz,选择AD7734的通道CH0、CH1、CH2进行模数转换,使能电压输入范围为0~5 V,寄存器数据位为24 bit,工作模式为连续工作模式。然后向磁阻传感器发送持续2μs大小为4 A~6 A的置位脉冲,单片机的计时器开始计时,同时进行对磁场强度进行数据采集,5 s后再次向磁阻传感器发送置位脉冲,计时器清零从新计时。采集后的地磁数据经过单片机处理后,由RS422串口输出。数字式磁强计的测量流程如图5所示。
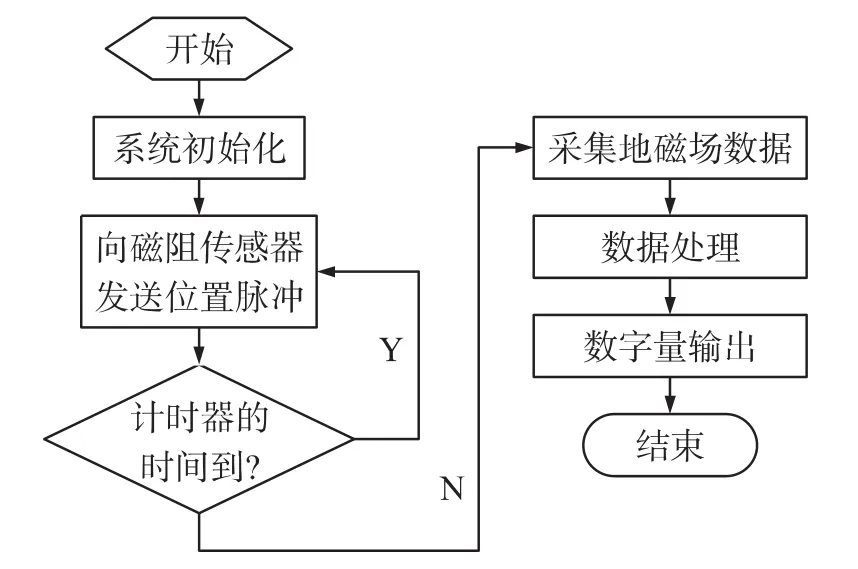
图5 软件主流程图
4 实验分析与结论
实验中通过精度达万分之三的高斯计对系统进行测试,将磁强计置于线圈的匀强磁场区域,调节磁线圈的供电电压,使磁场在-1 000 mGauss到1 000 mGauss的范围变化,每次按照100 mGauss的变化量进行递增或递减,在3个灵敏轴方向分别进行测量,记录下数字磁强计的模拟输出部分的电压输出量和磁强计显示的真实磁场强度值。磁强计部分实验数据如表1所示。

表1 数字式磁强计部分实验数据
通过MATLAB对数据进行线性拟合,计算出该磁强计的灵敏度为2.496 mV/mGauss,零点为-1.619 mV。磁场强度与输出电压经过线性拟合后的数值关系为:V=0.002 496×Mag-0.161 9。其中V为磁强计的输出电压,单位为伏特,Mag为磁场强度,单位为Gauss。图6为线性拟合结果和拟合误差图。表2是系统的各项指标。

图6 线性拟合结果和拟合误差

表2 设计指标与设计结果对照表
造成系统误差的主要原因为正交误差、灵敏度误差和零位误差,通过建立非正交的空间模型,采用了拟Newton迭代法对空间模型求解,使数字式磁强计的制造误差得到较好的校正[10-12]。实验结果表明该数字式磁强计设计方案可行,响应速度快、数据采集方便,可应用于导航、野外定向、气象探测等各个领域。
[1]刘诗斌.微型智能磁航向系统研究[D].西安:西北工业大学,2001.
[2]陈士荣.磁电阻传感器的应用与发展[J].传感技术学报,2002 (4):344-346.
[3]沈波,黄晓毛,王志兴,等.基于地磁原理的计转数传感器技术研究[J].兵工学报,2003,24(3):313-315.
[4]刘敬彪,郑玉冰,章雪挺.三轴磁罗盘的设计与误差校正[J].自动化仪表,2008(9):10-12.
[5]张海峰,刘晓为,王喜莲,等.磁电阻效应的原理及其应用[J].哈尔滨工业大学学报,2008(3):362-366.
[6]崔璐璐.基于MEMS器件的姿态测量系统研究与实现[D].大连:大连理工大学,2009.
[7]谢瑞芳.基于地磁信息的新型测速方法研究[D].长沙:国防科学技术大学,2010.
[8]杨红红,程慧娟.基于磁阻传感器和加速度计的电子罗盘设计[J].微型机与应用,2011,15:93-95.
[9]Honeywell.1-and 2-Axis Magnetic Sensors HMC1001/1002/ 1021/1022[EB/OL].[2011-5].http://www.honeywel1.com.
[10]刘诗斌,冯晓毅,李宏.基于椭嘲假设的电子罗盘误差补偿方法[J].传感器技术,2002,21(10):28-30.
[11]李秉玺,赵忠,孙照鑫,等.磁阻传感器的捷联式磁航向仪及误差补偿[J].传感技术学报,2003,6(2):191-194.
[12]李玎,卜雄洙.基于非正交磁传感器组合的旋转弹体姿态测量[J].兵工学报,2010,31(10):1316-1321.
孙笠森(1987-),男,硕士生,主要研究方向为动态测试与智能仪器;

岳凤英(1977-),女,硕士生导师,主要研究方向为测试计量技术及仪器、传感器与微机电技术(MEMS)、惯性导航;

李永红(1967-),男,硕士生导师,教授,国家人事部、科技部、教育部、财政部、发改委、自然基金委、中国科协等七部委联合确定的“新世纪百千万人才工程国家级人选”(2004年)。国务院特殊津贴专家(2000年)。1997年在华北工学院获测试计理技术及仪器专业工学硕士。目前为中北大学(原华北工学院)测试计理技术及仪器专业在职博士。2001年1月~12月在瑞士Neuchatel大学微技术学院传感器、执行器与微系统实验室作访问学者,重点进行MOEMS器件-光波导及MEMS传感器的设计及加工工艺研究。现在为中北大学电子工程系教授,兼任山西科泰微技术有限公司技术总监,3923602liyonghong@nuc.edu.cn。
基于磁阻传感器的数字式磁强计的设计*
孙笠森,岳凤英,李永红*,王恩怀
(中北大学信息与通信工程学院,太原030051)
为了实时准确地获取地磁参数,利用Honeywell的HMCl001单轴磁阻传感器和HMCl002双轴磁阻传感器设计了一种基于AD7734和C8051F410的小型化的数字式磁强计,采用恒流源电路和置位电路有效地解决了传感器失调和漂移的影响。阐述了系统硬件设计、软件流程。对数字式磁强计进行了测试,综合精度高于5‰,试验结果验证了该设计方案的可行性。
测试计量;磁阻传感器;恒流源电路;置位电路
TN949.6
A
1004-1699(2014)01-0048-05
山西省青年基金项目(2012021013-6)
2013-09-01修改日期:2013-12-09
C:5130
10.3969/j.issn.1004-1699.2014.01.009
猜你喜欢
西北工业大学学报(2022年2期)2022-05-11
防爆电机(2021年4期)2021-07-28
空间科学学报(2020年4期)2020-04-22
燕山大学学报(2020年1期)2020-03-12
电子制作(2018年19期)2018-11-14
传感器与微系统(2018年7期)2018-08-29
中国测试(2017年8期)2017-09-11
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年12期)2016-04-11
通信电源技术(2016年4期)2016-04-04
- 传感技术学报的其它文章
- Ion-Selective Detection of Cations and Anions by Using Pulsed Amperometric Two-Electrode System*
- Design of MEMSBionic Vector Hydrophone Based on NBR Encapsulation*
- Analysis of the Harmonic Frequency to Piezoelectric Ceramic Embedded in Concrete*
- Wireless Instrumentation Design for Heavy Metals Detection in Water Based on Light Addressable Potentiometric Sensor*
- Gas Leakage Source Localization Algorithm Based on Distributed MMSE Sequential Estimation*
- Wireless Sensor Node Based on Infrared Communication in Leaky Cable Detection*