MEMS陀螺仪开机漂移的补偿*
2014-09-06 10:48:36杨洪强杨荣彬
电讯技术 2014年6期
杨洪强,熊 飞,王 志,杨荣彬
(成都国腾电子技术股份有限公司,成都 610041)
MEMS陀螺仪开机漂移的补偿*
杨洪强**,熊 飞,王 志,杨荣彬
(成都国腾电子技术股份有限公司,成都 610041)
微机电系统(MEMS)陀螺仪体积很小,开机时产生的功耗会导致较大升温,造成电性能漂移严重,增加启动时间。为解决这个问题,分析了MEMS陀螺仪中对温度敏感的环节,并建立温度模型。通过对温度特性的补偿得到最小化的开机漂移。然后设计了一款MEMS陀螺仪电路以实现开机漂移的补偿。实测结果表明,采用该补偿方法,能够把100 s内的开机漂移减小到0.06 °/s,满足应用需求。
微机电系统;陀螺仪;开机漂移;启动时间;温度补偿
1 引 言
微机电系统(Micro Electronic and Mechanic System,MEMS)陀螺仪是一种测量物体角速度的传感器,它具有体积小、抗冲击、适合大批量生产等特点,在汽车、消费电子以及军事领域具有广阔的应用前景。近年来,MEMS陀螺仪得到了极大发展,国外已有多款成熟产品[1-2],说明了开机补偿的可行性。但是,因技术能力所限,国内目前还没有成熟的产品可以提供。
启动时间在陀螺仪的实际应用中是一个重要的参数,目前,对军用MEMS陀螺仪启动时间的要求普遍在秒级以下。实验和已有的文献表明,陀螺仪开机后,在没有角速度输入的情况下,输出会经历很长一段时间才能达到稳定状态,即存在零偏漂移。进一步的研究表明,开机零偏漂移是由陀螺仪内部温度的变化造成的。从文献[3-4]可知,陀螺仪工作时,内部电路会产生热量使得温度升高,而器件的参数受温度影响,从而产生零偏漂移。零偏漂移成为影响启动时间的重要因素,有必要研究补偿方法以缩短启动时间。对开机零偏漂移的研究是高性能MEMS陀螺仪实用化的重要课题。
已知开机漂移的补偿方法大多数是在陀螺仪输出数据后进行数据处理,没有从根本上解决陀螺仪的漂移问题。本文拟从陀螺仪内部分析和验证开机漂移的补偿思路。
2 MEMS陀螺仪零偏温度模型
MEMS陀螺仪开机漂移本质上是由温度变化引起零偏变化,所以有必要先建立零偏的温度模型。MEMS陀螺仪的系统结构如图1所示。其中,φD、φS、φCV、φBPF、φC、φPLL分别是传感器驱动轴、传感器检测轴、电容到电压(Capacitance to Voltage,CV)转换、带通滤波、比较器、锁相环产生的相移。
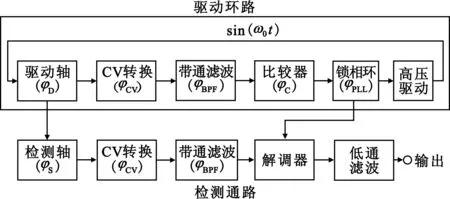
图1 MEMS陀螺仪系统框图Fig.1 System diagram of MEMS gyro
陀螺仪的零偏可能的来源是非常广泛的[5],正交误差是其最主要的来源。正交误差是由于驱动力直接耦合到检测方向上,从而产生检测方向的位移和电容变化,这就使得在没有角速度输入时,检测还是有输出,即零偏。正交误差与科氏力信号相位相差90°。从图1中可知,正交误差经解调器的同步解调以及低通滤波后可以被抑制掉,但这要求对相位进行精确控制。
驱动环路采用锁相的方式使其工作在陀螺仪驱动轴的谐振频率处,即驱动环路的相移为0,所以有
φD+φCV+φBPF+φC+φPLL=0
(1)
因为在谐振频率处,φD为-90°,φCV、φBPF、φC约为0,为了补偿φD,φPLL需要为90°。正交误差通过检测通路到达解调器的相移为
φD+φS+φCV+φBPF
(2)
将式(1)代入式(2)得
φD+φS+φCV+φBPF=-900+(φS-φC)
(3)经理论推导可知,将式(3)代入,经解调、滤波后,输出正交误差等效电容变化为(一般情况下φC<<φS)

(4)
其中,ΔCQ为解调前正交误差造成的传感器检测电容变化。
因此,从图1中可知温度引起零偏的变化可能来自两个方面:检测轴正交误差位移变化,即ΔCQ变化;相移φS变化。
ΔCQ和φS均由MEMS陀螺仪传感器决定,由于MEMS陀螺仪传感器以硅为材料,其材料性能受温度影响较大[6-7]。此外, CV转换器也会受温度影响。下面分别就此三方面进行分析。
2.1ΔCQ的温度特性
正交误差引起的传感器检测轴的位移为[5]
(5)
其中,yQ和yQ0分别对应温度为T和T0时的位移;xd、ms分别对应驱动轴的位移、检测质量块的质量;kxy、ωs、ωd分别对应温度为T时的驱动轴到检测轴的弹性系数、检测轴谐振频率、驱动轴谐振频率;kxy0、ωs0、ωd0则温度为T0时的驱动轴到检测轴的弹性系数、检测轴谐振频率、驱动轴谐振频率。
由于驱动环路AGC的作用,驱动轴位移xd随温度保持不变。根据文献[6],有

(6)
其中,kET为硅材料的弹性模量的温度系数,ΔT为温度变化量。由上式看出,yQ随温度变化很小,则ΔCQ随温度变化也很小。
2.2φS的温度特性
传感器检测轴相移为[5]
(7)
根据文献[6],有
(8)
其中,T0=300 K,则

(9)
2.3CV转换器的温度特性
CV转换器的传输函数为[5]

(10)
其中,ΔVQ为ΔCQ对应到CV转换器输出的电压变化量,Vcm为电路产生的基准电压,KB为Vcm与CV转换器用到的偏置电压VB之间的倍数关系。
综合上述各种影响,正交误差造成的输出零偏电压为
(11)

3 MEMS陀螺仪零偏温度补偿方法
在第2节温度特性分析的基础上,本节进一步推导以得到温度补偿的方法。
MEMS陀螺仪的温度补偿采用片内集成的方式,在输出级增加温度补偿电路来实现。温度补偿电路如图2所示,基本原理是通过运放实现一定的关系,对输入的量进行运算以得到温度补偿的效果。
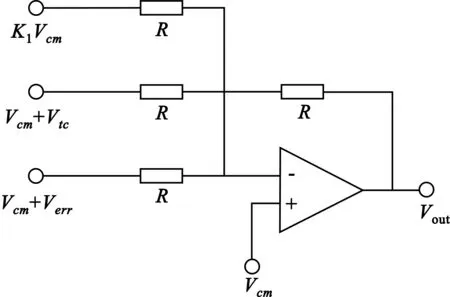
图2 MEMS陀螺仪开机漂移温度补偿电路Fig.2 Temperature compensation circuit for the startup drift of MEMS gyro
根据图2,有
-Vout=Vcm(K1-2)+Verr+Vtc
(12)
其中,Verr就是前节分析的零偏温度模型,而Vtc为补偿该模型的温度传感器信号。假设
Vtc=VcmK3(1+Ktc1ΔT+Ktc2ΔT2)
(13)
其中,Ktc1、Ktc2分别为Vtc的一阶、二阶温度系数,K3为比例系数,将式(11)、(13)代入式(12)可得
-Vout=Vcm[(K1-2+Acv+K3)+ (AcvKφs1+K3Ktc1)ΔT+(AcvKφs2+K3Ktc2)ΔT2]
(14)
其中,
(15)
考虑VCM的温度特性:
Vcm=Vcm0(1+Kvc1ΔT+Kvc2ΔT2)
(16)
将式(16)代入式(14),则
-Vout=Vcm0[KK+(KKKvc1+AcvKφs1+K3Ktc1)ΔT+
(KKKvc2+AcvKφs2+K3Ktc2+AcvKφs1Kvc1+K3Ktc1Kvc1)ΔT2]
(17)
其中,
KK=K1-2+Acv+K3
(18)
根据温度补偿的要求,有
Vout=Vcm0
(19)
由式(17)~(19)得到
(20)
式(20)即为MEMS陀螺仪温度补偿的依据。在式(20)中,Kvc1、Kvc2、Kφs1、Kφs2、Acv为已知量,K1、K3、Ktc1、Ktc2为温度补偿需要确定的量。在式(20)中要通过3个方程求解4个未知数,显然是不能得到确定解的,但是通过观察可以得到,如果能够满足
(21)
其中,m为比例常数,则式(20)的后两个等式能够同时满足,将式(21)代入式(20)得到
(22)
在陀螺仪测试标定时,选择合适的K3值,即可以得到K1、Ktc1、Ktc2,实现零偏温度补偿。
4 实验验证与分析
MEMS陀螺仪的实物封装图如图3所示,采用SIP封装,包括MEMS陀螺仪传感器和信号处理电路。在信号处理电路中集成了温度传感器和补偿电路以实现式(22)中的温度补偿系数。MEMS陀螺仪测试平台如图4所示。实验开始前,先将被测陀螺仪放入温控转台内进行老化实验,以使其性能稳定。实验开始时,将转台内温度稳定在27℃,保证实验不受环境温度变化的影响。先将数据采集卡打开,计算机开始记录陀螺仪输出电压数据。然后再开启陀螺仪电源,计算机继续记录数据,当陀螺仪电源开启100 s后停止采集数据(如果超过100 s还未稳定,则无实用价值,所以数据只采到100 s)。
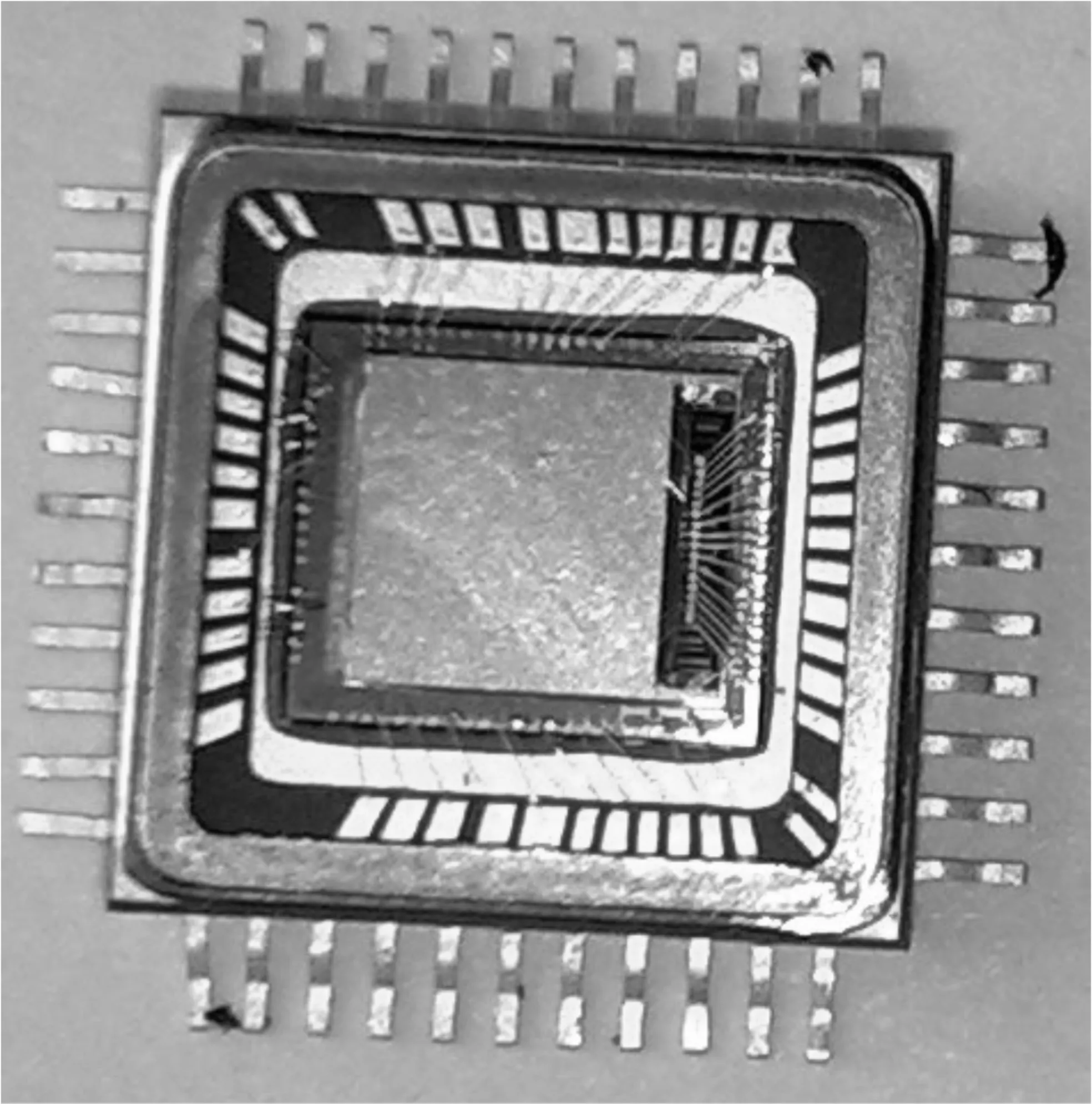
图3 MEMS陀螺仪实物图Fig.3 Photograph of MEMS gyro

图4 MEMS陀螺仪测试平台Fig.4 Test bench of MEMS gyro
补偿前后开机漂移的测试结果如图5所示。由图可知,补偿前开机100 s内零偏漂移了1 mV,补偿后相同时间内零偏漂移了0.4 mV,对应的等效角速度分别为0.15 °/s和0.06 °/s,补偿后的零偏漂移是补偿前的40%。补偿电路产生了较明显的效果。该漂移补偿结果满足大部分用户的应用需求。
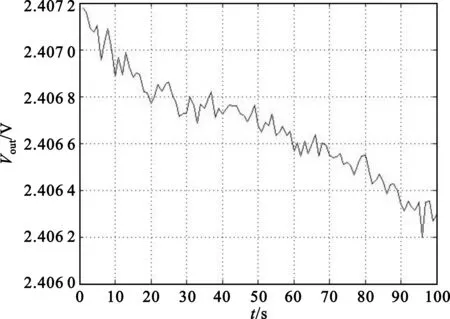
(a)补偿前
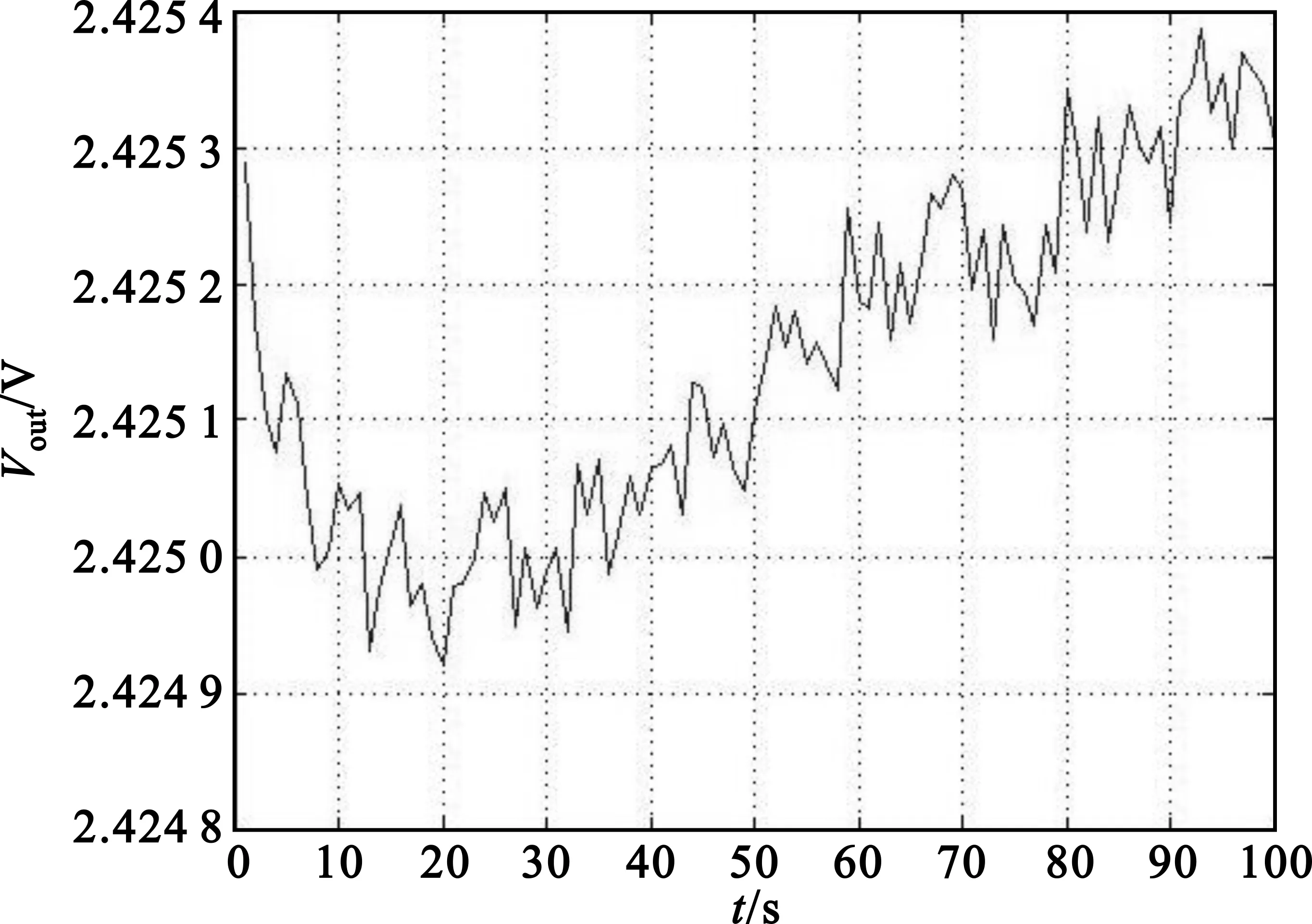
(b)补偿后
5 结束语
本文通过对MEMS陀螺仪开机漂移原因的分析、零偏温度模型的研究和温度补偿电路的构建,提出了一种零偏温度补偿的方法。针对一款MEMS陀螺仪产品,采用片内集成温度传感器和补偿电路的方式,实现了片内补偿。该补偿方法减少了硬件,实现了MEMS陀螺仪的小型化,对MEMS陀螺仪的实用化具有重要意义。实验结果表明,温度补偿对开机漂移有显著改善。但是,正如前所述,本文所有分析均基于正交误差这一影响零偏的主要因素,没有考虑零偏的其他来源,因此本文建立的模型与实际情况存在一定的偏差。如果要建立更加精确的模型,还需要进一步的研究。本文所建模型已经足够满足实际的一些应用需求,因此,具有一定的参考意义。
[1] Liu Kai, Zhang Weiping.The development of micro-gyroscope technology[J]. Journal of Micromechanics and Microengineering, 2009,19(2):1-29.
[2] Steven Nasiri. A Critical Review of MEMS Gyroscopes Technology and Commercialization Status[EB/OL].[2014-02-28].http:// invensense.com/mems/gyro/documents/whitepaper.
[3] Gulmammadov F.Analysis, modeling and compensation of bias drift in MEMS inertial sensors[C]//Proceedings of 4th International conference on Recent Advances in Space Technologies. Istanbul, Turkey:IEEE, 2009:591-596.
[4] 罗兵, 尹文,江明明,等. 微机械陀螺零偏温度梯度建模[J].电光与控制, 2008,15(11): 29-31. LUO Bin, YI Wen,JIANG Ming-ming,et al. Temperature grads modeling of zero bias for micro mechanical gyroscope[J]. Electronics Optics&Control, 2008,15(11): 29-31.(in Chinese)
[5] Saukoski M. System and circuit design for a capacitive MEMS gyroscope[D]. Espoo, Finland:Helsinki University of Technology, 2008:97-109.
[6] 陈淑铃,杨波,王寿荣,等.Z轴硅微机械陀螺仪温度特性研究[J].电子器件, 2008,31(6): 1753-1756. CHEN Shu-ling, YANG Bo,WANG Shou-rong. Research on thermal characteristic of Z-input silicon micromachined gyroscope[J].Chinese Journal of Electron Devices, 2008,31(6): 1753-1756.(in Chinese)
[7] 陈怀, 张嵘,周斌,等. 微机械陀螺仪温度特性及补偿算法研究[J].传感器技术,2008,23(10):24-26. CHEN Huai, ZHANG Rong,ZHOU Bin,et al.Research on thermal characteristic and compensation algorithm for MEMS-gyroscope[J].Journal of Transducer Technology,
2008,23(10): 24-26.(in Chinese)
YANG Hong-qiang was born in Ya’an, Sichuan Province, in 1974. He received the Ph.D. degree from University of Electronic Science and Technology of China in 2003. He is now a senior engineer. His research concerns high performance analog (including RF) integrated circuit and MEMS system design.
Email:hqyanguestc@163. com
熊飞(1980—),男,四川泸县人,硕士,工程师,主要从事MEMS系统技术和电路技术方面的研究;
XIONG Fei was born in Luxian,Sichuan Province,in 1980.He is now an engineer with the M.S. degree.His research concerns MEMS technology and circuit technology.
王志(1985—),男,四川西充人,硕士,工程师,主要研究方向为MEMS传感器设计;
WANG Zhi was born in Xichong,Sichuan Province,in 1985.He is now an engineer with the M.S. degree.His research concerns MEMS sensor design.
杨荣斌(1982—),男,四川资中人,硕士,工程师,主要从事MEMS处理电路研究。
YANG Rong-bin was born in Zizhong,Sichuan Province,in 1982.He is now an engineer with the M.S. degree.His research concerns MEMS processing circuit.
CompensationforStartupDriftofMEMSGyroscope
YANG Hong-qiang, XIONG Fei,WANG Zhi, YANG Rong-bin
(Chengdu Goldtel Electronic Technology Co., Ltd., Chengdu 610041, China)
The power dissipation may cause a large temperature increase because the small micro electronic and mechanic system(MEMS) gyroscope results in serious electrical performance drift and a longer startup time. To solve this problem, an analysis on the points sensitive to temperature is given, and temperature model is built. The smallest startup drift is achieved by temperature compensation. Then a corresponding compensation circuit is implemented. The test results reveal that, by this method, the startup drift is reduced to 0.06 °/s within 100 s, which meets the requirement of application.
MEMS;gyroscope;startup drift;startup time;temperature compensation
10.3969/j.issn.1001-893x.2014.06.024
杨洪强,熊飞,王志,等.MEMS陀螺仪开机漂移的补偿[J].电讯技术,2014,54(6):825-829.[YANG Hong-qiang, XIONG Fei, WANG Zhi,et al.Compensation for Startup Drift of MEMS Gyroscope[J].Telecommunication Engineering,2014,54(6):825-829.]
2014-03-03;
:2014-04-04 Received date:2014-03-03;Revised date:2014-04-04
:hqyanguestc@163. comCorrespondingauthor:hqyanguestc@163. com
TN492
:A
:1001-893X(2014)06-0825-05

杨洪强(1974—),男,四川雅安人,2003年于电子科技大学获博士学位,现为高级工程师, 主要从事高性能模拟(含射频)集成电路和MEMS系统设计技术研究;
**
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
房地产导刊(2020年11期)2020-12-28 01:32:30
山东冶金(2019年5期)2019-11-16 09:09:38
铁道通信信号(2019年4期)2019-10-10 03:42:56
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
人生十六七(2016年14期)2016-12-01 05:24:26
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
通信电源技术(2016年1期)2016-04-16 04:57:31