基于GPS-RTK的海上打桩远程监控系统设计
2014-08-25 01:19:33林吉兆谢义林贾登科
测绘工程 2014年12期
杨 帆,林吉兆,谢义林,贾登科
(1.中交第四航务工程勘察设计院有限责任公司,广东 广州 510230;2.南京水利科学研究院,江苏 南京 210029)
基于GPS-RTK的海上打桩远程监控系统设计
杨 帆1,林吉兆1,谢义林2,贾登科1
(1.中交第四航务工程勘察设计院有限责任公司,广东 广州 510230;2.南京水利科学研究院,江苏 南京 210029)
讨论海上打桩远程监控系统开发的意义,阐述GPS-RTK智能打桩系统结构和原理,提出海上打桩远程监控系统方案,利用数据无线传输技术和数据库存贮技术等计算机科学技术开发出一套智能化的远程监控系统。实现远程查看项目当前工作状态和工作质量、生成工程报表、远程控制等功能,已应用于江苏某海上打桩项目中,保障了项目顺利进行,为类似工程提供借鉴。
海上打桩;GPS-RTK;远程监控;数据传输;数据库
近年来,我国海洋事业大力发展,打桩定位在一些水运码头、港口、跨海桥梁工程的建设过程中是必不可少的一个重要环节[1-2]。当前海上打桩测量定位方法日益成熟,基于GPS-RTK多传感器集成桩位定位系统集成化程度较高,当系统发生故障时,往往需要专家亲临现场找出系统故障原因,不仅浪费人力物力,还影响施工进度。同时上级领导需直接了解项目进展情况时,往往亲自前往施工现场,不利于公司的统筹规划和质量把握。
现如今,物联网掀起了世界信息产业的第三次浪潮[2]。我国许多机构和单位也做了大量的技术研发和应用工作。为了满足物联网建设发展,国内电信运营商已成功实现我国移动数据通信产业由2G到3G的飞跃[3-4]。网络热点覆盖范围广和网络速度快为物联网的发展提供了契机。
本文设计的远程监控系统在充分满足用户需求前提下,结合2G网络速率慢、资费低和3G网络速率快、资费高的特点,将远程监控系统分为基于GPRS单片机的远程监视系统和基于3G网路的远程控制系统两部分。其中,基于GPRS单片机的远程监视系统提供日常数据采集,发送入库、数据处理分析以及用户访问等功能,作为主体部分进行设计开发;基于3G网路的远程控制系统是将打桩船现场控制中心接入3G网络后用远程控制软件实现远程协助服务功能,远程控制软件与常规远程控制软件无异。本文将详细介绍基于GPRS单片机的远程监视系统的原理和设计开发。
1 GPS-RTK智能打桩定位系统
目前,海上打桩系统主要是基于GPS-RTK技术实现的智能打桩系统,主要设备有在陆地的GPS基准站接收机和电台发射器;船上的3台GPS流动站接收机、横向倾斜仪、纵向倾斜仪和两个测距仪。硬件设备安放参考位置如图1所示。

图1 海上打桩系统硬件设备位置
该打桩测量定位系统对船体的控制采用3台GPS仪器,目的是在控制船位的同时,控制船体横、纵摇摆的倾斜量。在数学模型中,对因船体姿态的变化所引起的定位计算误差加以改正,提高对桩位的定位精度。
整个海上打桩基本流程为移船、定位、开始打桩和结束打桩4个步骤。在打桩过程,由于重锤一直猛烈地锤击桩体,因此使用GPS定位时,无法使用GPS定位仪对桩身直接进行定位。定位系统采用分级控制形式。首先将安装在船体上的GPS设备对船体进行RTK定位[5-6];其次再以船体作为已知参照物,用安装在船体前端适宜位置上的免棱镜激光测距仪对桩身位置进行测定,并用倾斜仪测量船体姿态;最后利用这些测量数据通过串口线发送至控制室的电脑主机进行计算,从而间接得到桩体的测量坐标,使系统的测量精度达到厘米级。
2 监控系统架构和设计
基于GPRS单片机的远程监控系统从功能上可以分为3个组成部分,即现场监控部分、服务器部分和客户端远程访问部分。远程监控系统数据传输整体流程如图2所示,现场监控部分负责将GPS、测距仪、倾斜仪等传感器数据进行采集和解算,并将解算结果和工程属性信息等通过GPRS网络传输至内陆服务器;服务器部分负责接收数据的读取、分割、存贮并供用户访问提取;客户端远程访问部分负责获取用户操作从而访问数据库并提取对应数据,将数据进行报表生成、绘图以及模拟动画形式呈现于用户面前。

图2 数据传输流程
2.1 服务器开发
服务器接收和存贮来自各艘打桩船发送过来的数据信息,并为客户端程序提供访问数据,因此,它在本系统处于至关重要的地位。首先需要根据现场监控软件的操作步骤分析数据传输的具体内容,详细内容见表1。其次选择运行环境和数据库平台,服务器运行环境选用微软Windows 7 Sever版本;数据库平台选用SQLSEVER2005,它相比ORACALE、ACCESS、Foxpro等国内外常用数据库具有的优点是:良好的数据库设计、杰出的管理和网络运行功能。最后在SQLSEVER2005数据库平台中创建项目名称,针对数据内容创建数据表和选择关键字。
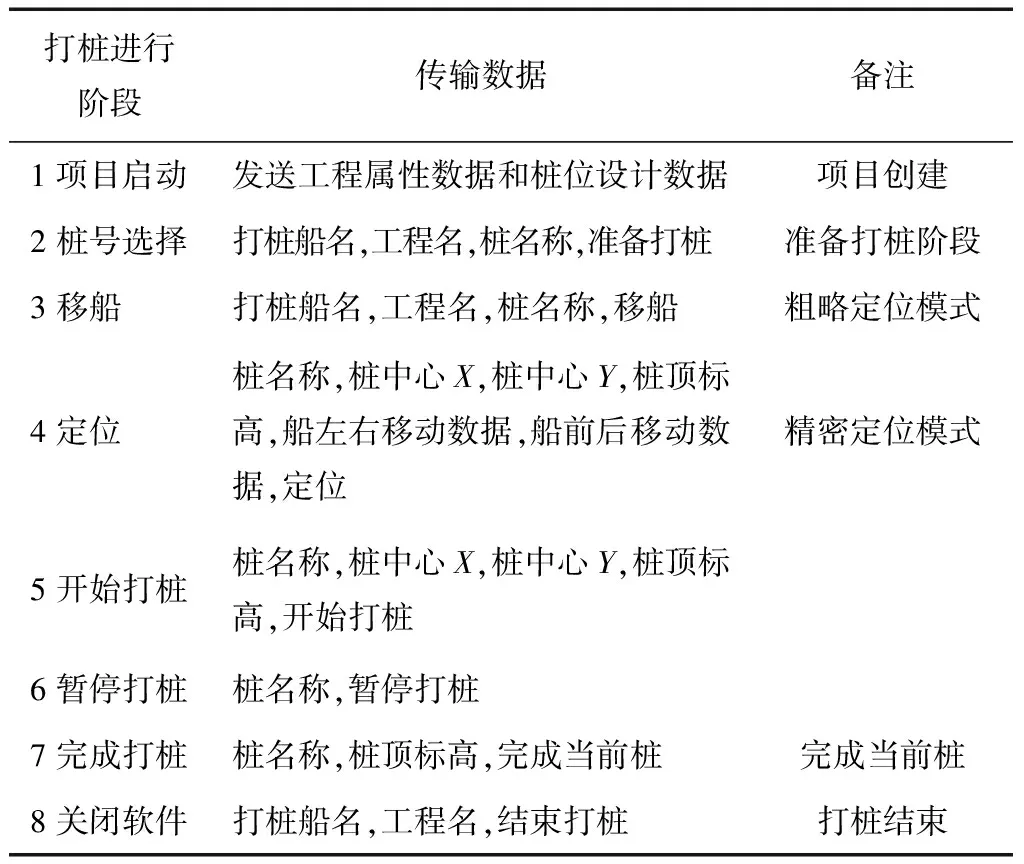
表1 海上打桩远程监视系统数据传输内容
创建数据库名为PilingData数据库,在PilingData库中建立5张数据表,这些数据表分别是桩位数据表PicketData、船固坐标表PilingShipCoor、临时数据表CurTemPilingInfo、桩体定位数据表PositionProcess、工程属性表ProjectInfo,这些表都记录了打桩船的重要参数信息和桩体定位过程和数据。以桩位数据存贮表PicketData(见表2)为例,该表存贮了所有桩位的设计坐标、打桩方式、实测坐标和完成信息等,桩体号码是该表的索引关键字。这些数据将用于绘制桩位详细分布图、已完成桩位的坐标偏差计算、工作质量和进度的统计制表等其他工作。

表2 桩位数据存贮表PicketData
2.2 现场监控软件开发
现场监控软件在SeaGPS软件(详见文献[1])基础上重新设计和开发,程序设计流程如图3所示。

图3 现场监控软件流程
当项目开始时,用户需新建工程项目,并输入工程参数和基础数据,同时还需进行数据库初始化操作,数据库初始化操作的目的是将打桩项目的基础数据(设计桩位数据、项目属性数据等)发送至服务器,数据库完成首次初始化后,现场监控软件此功能按钮变为灰色以防误操作,再开启远程监控,这样就完成了打桩前的所有准备工作。
接下来,用户在现场监控软件中选择需要施打桩的桩号进行桩体定位,并将定位结果与桩位设计数据进行比较,当差值满足限差规定时,电脑语音提示可以开始打桩。当完成当前桩时,用户可以选择继续打桩或者退出系统结束打桩工作。
2.3 远程可视化软件设计
软件主要包含实时监控、数据查询、动画模拟打桩、数据报表生成等功能,此外还具有放大、缩小、平移、坐标旋转、总体视图等其他人性化的功能。软件设计流程如图4所示。

图4 远程监控设计流程
其中,在实时监控功能界面中可以查看任意选择的打桩船实时工作画面,如图5所示。在总图区域中,用户不仅可以查看该船正在进行的项目基本信息,还可以观察已打桩的分布位置(红色表示已打桩,绿色表示当前施打桩,黑色表示未打桩),并查看当前打桩船在桩位设计图中的准确位置;在船体桩位视图区域中,用户可以查看当前桩的平面偏差;在施打桩立面图中,用户可以查看当前桩的高程偏差。
在历史查询功能中,用户可以查询已打桩的属性信息和定位数据结果等其他内容,如图6所示。在历史记录示意图区域中,用户可以查看已打桩的打桩定位模拟动画,并可以通过该区域的相应控件进行画面播放的快慢、图形大小等基本设置。

图6 历史记录查询界面
同时,该软件还可对已打桩的数量和质量进行统计和制图,并结合工程属性和其他内容生成Word报表,满足用户对项目的纸质签名和归档等需求。
3 系统实现和应用
3.1 系统实现
基于GPRS单片机的远程监视系统的各个组成软件都是在Windows7编译环境,选用VC.net中的C#语言进行开发实现。
在系统结构上,本项目选用C/S(Client/Server)结构,它相比B/S(Browser/Server)结构[7-8]具有以下优点:
1)C/S结构相应速度快;
2)在操作简便性和快捷性方面,C/S结构优于B/S结构;
3)在数据传输安全方面,C/S结构优于B/S结构;
4)C/S结构简单,开发周期短,对服务器要求较低。
在网络协议上,TCP(Transmission Control Protocol)协议相比UDP(User Datagram Protocol)协议[9]虽然传输效率稍低,对系统资源需求较多,但是TCP协议可靠性程度高。经多次试验测试证明,TCP协议从未出现数据丢失,而UDP协议出现少量数据丢失。由于此项目对数据安全和完整性要求较高。因此,本项目选用TCP协议作为系统的网络传输协议。
一套基于GPRS单片机的远程监控系统需要的硬件设备和软件见表3。当系统需要增加新的打桩船时,只需给这艘打桩船添加一套GPRS单片机,并在现场电脑主机中安装现场监控软件。

表3 硬件和软件统计
3.2 系统应用
本文研发的海上打桩远程监控系统已经成功在某海上打桩项目中得到应用。经过努力和协调工作,系统各部分都安装调试成功。在系统长时间试运行过程中,现场监控软件成功将所有数据发送出去,服务器在接收和存贮大量来自现场监控端的数据过程中未发现数据丢失,验证了该系统的可靠性;远程可视化软件与服务器快速建立连接,实现远程可视化操作,在多个用户同时访问时未出现系统故障,实现了多用户同时操作且互不干扰;在实时性方面,远程可视化软件实时监控界面与现场监控界面基本一致,延迟较小。
目前,监控系统运行情况良好,用户体验效果较好,得到各使用者的广泛好评,图5所示为海上打桩远程监控实时界面,用户只需要选择访问的打桩船名称,就能实时查看当前打桩船的工作状态和项目基本信息,一目了然,非常清楚地反映用户需要了解的信息内容。
图6所示为历史记录查询界面,用户可以在这个界面中查看已打桩的完成时间、打桩时长和位置偏差等基本信息,并且用户还可以在该界面中查看已打桩的动画模拟过程,动画模拟打桩非常形象地还原了打桩的具体过程,方便用户详细了解具体施工细节。
4 结束语
本文综合应用了无线通讯技术、导航定位技术、互联网技术、数据库及可视化软件设计等多种技术对海上打桩远程监控系统进行研究和开发,具体归纳如下:
1)系统阐述了海上打桩测量工艺流程及海上打桩远程监控系统的总体结构和各个子系统的功能。
2)对数据传输内容和处理过程的相关问题进行深入分析,尝试性提出该系统结构和网络模式的选择策略。
3)按本文所述方法研发的海上打桩远程监控系统已成功用于某打桩工程项目中,目前该系统运行情况良好,用户体验较好。公司领导及专家能随时掌握所有打桩船的工作情况,并对突发事件准确进行及时处理,节省了大量的人力、物力,为保障工程项目的顺利进行做出重要贡献。
[1]杨帆.海上打桩远程监控系统研究[D].上海:同济大学,2012.
[2]周小平,姚连壁,刘春.打桩定位的理论、方法与实现[M].西安:西安地图出版社,2008.
[3]关勇.物联网行业发展与分析[D].北京:北京邮电大学,2010.
[4]孙军亮.基于GPRS的电网远程监控与调度系统的研制[D].西安:西安科技大学,2009.
[5]程剑刚.网络RTK联合声波测深仪在水下地形测量中的应用[J].测绘工程,2014,23(3):63-65.
[6]王建忠,王玉龙.多波束与RTK三维水深测量技术的联合应用[J].测绘工程,2014,23(4):65-68.
[7]尚捷,姜文刚.基于3G的内河水流远程视频监控系统设计[J].计算机与数字工程,2011,39(6):169-172.
[8]苗沐新.浅论C/S和B/S软件系统体系结构的差异[J].长春师范学院学报:自然科学版,2007,26(3):92-95.
[9](美)莱特 (Wright,G.R.),(美)史蒂文斯(Stevens,W.R.).TCPTCP/IP详解(卷2:实现)[M].陆雪莹,蒋慧,译.北京:机械工业出版社,2008.
[责任编辑:刘文霞]
A design of remote monitoring for marine piling based on GPS-RTK
YANG Fan1,LIN Ji-zhao1,XIE Yi-lin2,JIA Deng-ke1
(1.CCCC-FHDI Engineering Co.,Ltd.,Guangzhou 510230,China;2.Nanjing Hydraulic Research Institute,Nanjing 210029,China)
It presents the significance of a design of remote monitoring for marine piling, and the structure of the system of marine piling based on GPS-RTK.A scheme of remote monitoring system for marine piling is proposed. The system enables the user to examine the working condition and the quality of finished work,and creates engineering reports.At last it can be applied to some project in Jiangsu Province successfully,which reaches to the smooth process of this project and gives some advice for other Projects.
marine piling;GPS-RTK;remote monitoring;data transmission;data base
2013-11-12;补充更新日期:2014-05-10
杨 帆(1988-),男,硕士研究生.
P228.4
:A
:1006-7949(2014)12-0076-05
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
英语文摘(2021年11期)2021-12-31 03:25:18
江苏船舶(2021年4期)2021-11-12 14:04:10
工程技术研究(2021年14期)2021-10-26 10:13:08
装备维修技术(2021年41期)2021-02-17 21:52:12
中国船检(2019年5期)2019-06-27 12:57:14
World Journal of Gastroenterology(2019年48期)2019-02-12 12:58:34
学生天地(2018年19期)2018-09-07 07:06:30
科技创新与应用(2017年13期)2017-05-24 10:10:08
河南建材(2016年1期)2016-03-11 08:28:03