VRS参考站点形变对流动站定位坐标的影响分析
2014-08-25 01:19:33朱丽强
测绘工程 2014年12期
张 勇,朱丽强,严 津
(1.苏州工业园区格网信息科技有限公司,江苏 苏州 215027;2.江苏CORS苏州分中心,江苏 苏州 215027)
VRS参考站点形变对流动站定位坐标的影响分析
张 勇1,2,朱丽强1,2,严 津1,2
(1.苏州工业园区格网信息科技有限公司,江苏 苏州 215027;2.江苏CORS苏州分中心,江苏 苏州 215027)
在国内外,很多地方的网络RTK都采用虚拟参考站(VRS)技术,有些地方建立的CORS网较早,某些基准站会发生一定的形变,针对VRS参考站点形变影响流动站定位坐标的问题,通过理论分析与严密的公式推导,并对VRS系统GPSNET中参考站坐标形变进行仿真试验。结果表明,用户流动站坐标是通过虚拟参考站转接到物理主参考站,即流动站的参考站实际上是物理主参考站,用户流动站坐标变化量与物理主参考站坐标变化量基本一致,并对参考站形变后坐标调整提出方案。
VRS参考站;站点形变;流动站坐标;物理主参考站;流动站物理坐标参考系
随着面向厘米级高精度实时动态定位服务的多功能连续运行参考站系统(CORS)相继建立,并成为重要的地理空间数据基础设施[1-2]。虚拟参考站技术在现代测绘应用中有着重要的作用。目前国内有多个省市建成的网络RTK系统采用VRS技术,如苏州市,浙江省,四川省,湖北省等省市。有些站点建站较早,站点坐标发生了一定的变形,需要对其坐标进行调整。参考站坐标的调整会影响到用户流动站的坐标,这会对测绘生产应用带来一定影响。
本文针对参考站坐标调整对流动站坐标的影响,从VRS理论进行详细分析,再通过严密的公式推导,最后对实际VRS系统进行测试来验证理论分析与公式推导的正确性,得到用户流动站坐标变化量与物理主参考站坐标变化量保持一致。
1 VRS 系统介绍及原理
VRS是Trimble公司提出的基于多参考站网络环境下的GPS 实时动态定位技术,通常把VRS技术归为网络RTK 技术的一种。VRS 系统包括: 连续运行参考站、移动站用户接收机、通讯网络、数据处理与控制中心4部分。
如图1所示,虚拟参考站技术就是利用地面布设的多个参考站组成GPS连续运行参考站网络(CORS),综合利用各个参考站的观测信息,通过建立精确的误差模型(如电离层、对流层、卫星轨道等误差模型),在流动站附近产生一个物理上并不存在的虚拟参考站(VRS)。由于VRS位置通过流动站接收机的单点定位解来确定,故VRS与流动站构成的基线通常只有几米到十几米,在流动站与虚拟参考站之间进行载波相位差分改正,可实现高精度实时定位。VRS技术的主要特点[3]如下:
1)流动站需要将本站概略位置传递给主控中心。
2)主控中心实时生成并发送虚拟观测值或差分改正数。
3)流动站仅要求一般的支持RTCM18/19,20/21的RTK接收机,流动接收机的基线解算与常规RTK无异,不需要另外的软件支持,兼容性强。唯一不同的是,流动站需要向主控中心传递本站的概略坐标,即虚拟参考站的坐标。
4)主控中心和流动站间需要双向数据传输,用户数量不能无限制增加,而要取决于网络带宽和主控中心服务器的硬件条件等。总的来说,VRS相对于其它模式而言具有很多优势,所以发展很快。
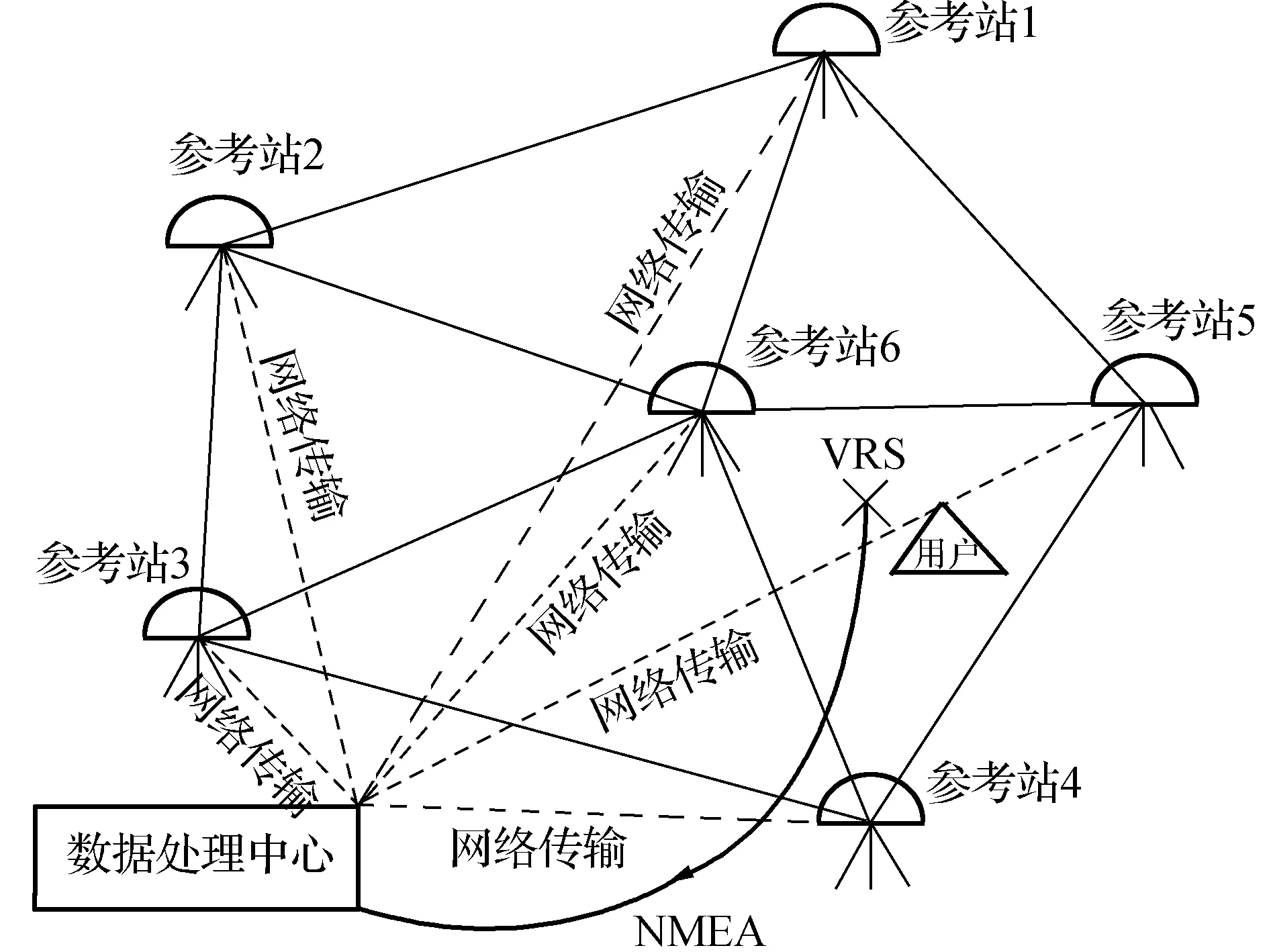
图1 虚拟参考站技术位置关系图
2 VRS差分改正数生成与流动站定位
虚拟参考站(VRS)技术利用地面布设的多个参考站组成CORS网络,通过融合各参考站的观测信息,建立精确的空间相关误差修正模型,在流动站附近产生一个物理上不存在的虚拟参考站[4-7]。在参考站之间的整周模糊度固定完成后,就可以结合载波相位观测值和整周模糊度来计算参考站间的综合残差。双差观测方程为
λ(Δ▽φ+Δ▽N)-Δ▽ρ=
Δ▽O+Δ▽I+Δ▽T+Δ▽M+Δ▽ε.
(1)
式中:Δ▽ρ为真实双差卫地距,λ(Δ▽φ+Δ▽N)为载波相位观测值的等效距离,方程式右端为综合残差。
令μ=Δ▽O+Δ▽I+Δ▽T+Δ▽M+Δ▽ε,则式(1)转换为
μ=λ(Δ▽φ+Δ▽N)-Δ▽ρ.
(2)
μ中包含有电离层延迟残差Δ▽I、对流层延迟残差Δ▽T、轨道误差残差Δ▽O、随机噪声Δ▽ε、多路径残差Δ▽M,其中Δ▽M和Δ▽ε与站间距无关,可以通过精心选址和选择优良的接收机来消除[3],且可以通过恒星日滤波来消除多路径影响[8]。则综合残差简化为
μ=Δ▽O+Δ▽I+Δ▽T.
(3)
当流动站与主参考站间的距离短时,可以忽略μ,直接使用常规RTK进行计算,但是在中长基线中,这三项对精度有着主导性的作用,不能被忽略。在网络RTK中,由于参考站间距一般在40~60 km,所以当流动站离主参考站较远时就要进行内插改正。
设选取了n条参考基线(具有同一公共点A),可以得到参考站间的双差综合误差为
(4)
计算出参考站间的双差延迟后,便可根据合适的模型来内插VRS站的改正数。由于参考站一般采用的是双频接收机,那么可以根据色散效应,在综合残差中提取出其中的电离层延迟残差和对流层延迟残差。
流动端接收到通过网络发来的虚拟参考站数据后按照RTK定位模型进行解算。虚拟站与流动站之间建立的双差方程为

(5)
恢复成虚拟站单差数据,并代入式(5)得

(6)
由于V和U距离非常近,它们之间的双差观测值基本可以消除对流层延迟和电离层延迟,则得到下式:
(7)
将式(6)代入式(7)得


(8)
式中,Δ▽NAV+Δ▽NVU可以合并为Δ▽NAU一起解算。从式(8)得之,只要固定了模糊度Δ▽NAU,便可解算出流动站的位置信息。
同样,如果式(8)中的观测值换成伪距,则无需解算模糊度,这就是RTD定位的一种模式,如式(9)所示。

(9)
通过式(8)及式(9)便可计算流动站的坐标。
3 流动站物理坐标参考系推导
由式(8)、式(9)便可计算得到流动端的坐标,对式(8)中双差观测值与单差观测值进行分解重新组合得

λ(Δ▽NAV+Δ▽NVU)=▽ρU-▽ρV.
(10)
对式(10)中的双差卫地距与双差模糊度进行分解得

λ(▽NV-▽NA+▽NU-▽NV)=▽ρU-▽ρV.
(11)
对式(11)中的单差模糊度、单差卫地距进行重新组合得

(12)
由式(12)得,流动站表面上与虚拟站差分进行差分定位,其实流动站解算依然是与主参考站进行差分相对定位,虚拟参考站只是起到了中间传递数据的作用,为了保持以前RTK模式与现在网络RTK模式一致[9-10]。
4 试验分析
假设有一个采用VRS技术的CORS系统,建站较早,经过几年的运行,站点发生了形变,又没有及时进行坐标修正。这样在没有及时修正之前,实际站点位置和预设坐标不一致,这样就会对流动站的定位得到的坐标产生影响。
模拟假设一个采用VRS技术的GPSNET系统,系统选取p001、p002、p003、p004这4个站点数据,构成的网型如图2所示,站点间距见表1。各站点间距离采用GAMIT软件进行解算,坐标平差采用自主研发的Geone SAHAWin平差软件,各点位相对中误差均小于2 mm。
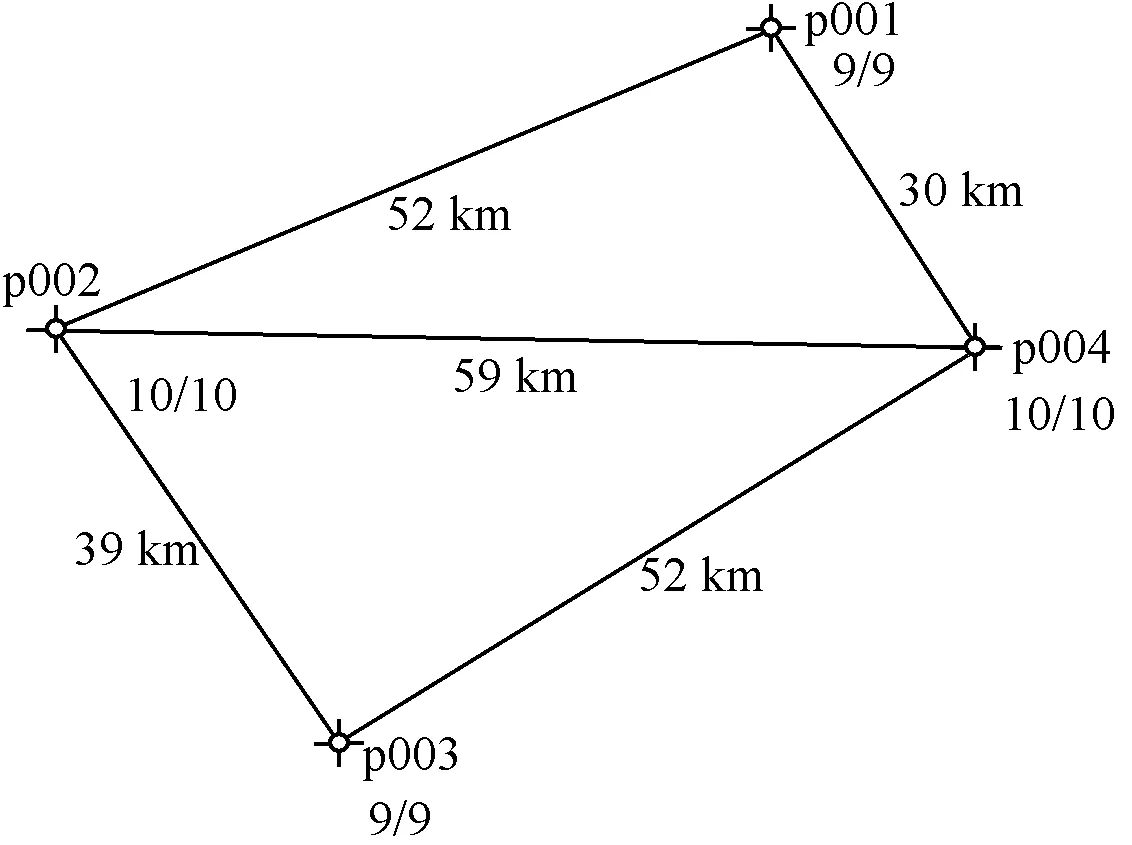
图2 VRS系统网型

表1 参考站间距
现利用账户admin在p001站附近登入VRS系统进行定位,选取在p001站附近是为了使物理参考站选择为p001站,这样便于调整p001站的坐标来做测试。登入后GPSNET软件显示的流动站位置,如图3所示。流动站NMEA坐标,如表2所示。

图3 admin用户登入后位置显示

表2 admin账户登入的NMEA坐标信息
根据VRS技术原理,admin用户的虚拟参考站即为它的NMEA坐标处。可以从GPSNET软件中看到Ref-Station一栏显示“113 p001, distance 5 725.469 7 m”,从而确定物理主参考站是p001站。
现设计4种方案测试,每种测试方案调整p001站的坐标,如表3所示。

表3 各方案p001站坐标调整量 cm
根据以上4种方案对两个点进行测量,每次测量时测量次数不少于3次,取其平均坐标。测试结果如表4所示。

表4 各种方案测试结果对比 m
由表4可以看出,考虑到RTK的定位精度在2~3 cm级,各方案中2个点坐标的变化值基本上与物理主参考站的坐标调整量一致,虚拟参考站只是取到了中转的作用。
5 结论与建议
本文通过理论分析与公式推导,对采用VRS技术的GPSNET软件进行测试,分析了参考站点发生形变后对流动站定位坐标的影响,得到如下几点结论与建议:
1)当参考站点发生形变后,以此参考站为物理主参考站的流动站的定位坐标变化量与参考站坐标形变量一致。
2)虚拟参考站只是起到了中间传递数据的作用,为了保持以前RTK模式与现在网络RTK模式一致,流动站物理坐标参考系与参考站一致。
3)当参考站点发生形变后会直接对流动站定位坐标发生变化,从而得到不准确的测绘结果,故在参考站点日常的维护中要定期对站点坐标进行复测,及时更新发生形变后的参考站坐标来保证测绘结果的正确性。
[1]RIZOS C. HAN S. Reference Station Network Based RTK Systems:Concepts&Progress[J].Wuhan University Journal of Nature Sciences,2003,8(2B):566-574.
[2]VOLLATH U,BUECHERL A,LANDAU H,PAGELS C,W AGNER B.Multi-base RTK Positioning Using Virtual Reference Stations[A].Proc ION GPS2000[C].Salt Lake City[s.n.],2000.123-131.
[3]黄丁发,熊永良,袁林果.全球定位系统(GPS)理论与实践[M].成都:西南交通大学出版社,2006.
[4]黄丁发,李成钢,吴耀强,等.GPS/VRS实时网络改正数生成算法研究[J].测绘学报,2007,36(3):256-261.
[5]卜长健,雷雨,赖建华.浅析提高JXCORS稳定性及定位精度的措施[J].测绘与空间地理信息,2014,37(3):160-163.
[6]周国文.基于CORS系统的网络RTK技术在城市地形测量中的应用[J].测绘与空间地理信息,2014,37(9):147-148,154.
[7]周东卫.GNSS参考站网络的电离层完备性监测研究[J].测绘科学,2014,39(2):27-31.
[8]周乐韬.连续运行参考站网络实时动态定位理论、算法和系统实现[D].成都:西南交通大学,2007.
[9]张勇.网络GPS RTK的VRS数据解算关键技术研究[D].南京:河海大学,2013.
[10]甘雨,隋立芬,张鹤,等.利用接收机钟差实时滤波提高GNSS精度[J].测绘工程,2014,23(5):6-8.
[责任编辑:刘文霞]
The influence of VRS reference station deformation on the roving station position
ZHANG Yong1,2,ZHU Li-qiang1,2,YAN Jin1,2
(1.Suzhou Industrial Park Geone Information Technology Co.,Ltd.,Suzhou 215027,China;2. Suzhou Branch of Jiangsu Province CORS, Suzhou 215027,China)
Many network RTKs are using virtual reference station (VRS) technology. For VRS reference site deformation problems affecting rover positioning coordinates, the theoretical analysis and strict formula are deduced, then the VRS system coordinates adjustment test.Results show that the user rover coordinates are converted from the virtual reference station to physical main reference station, which changes consistently with the physical main reference station coordinates variation. Suggestions are given for reference station coordinates adjustment.
VRS reference station; station deformation; rover coordinates; physical main reference station; rover physical coordinate reference frame
2014-01-14;补充更新日期:2014-10-10
张 勇(1988-),男,硕士.
P228
:A
:1006-7949(2014)12-0039-04
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
黑龙江工程学院学报(2015年2期)2015-04-19 00:43:13