南京长江四桥引桥悬臂拼装测量技术
2014-08-25 01:19郑勇峰
测绘工程 2014年9期
刘 岭,郑勇峰
(浙江省电力设计院,浙江 杭州 310012)
南京长江四桥引桥悬臂拼装测量技术
刘 岭,郑勇峰
(浙江省电力设计院,浙江 杭州 310012)
以分段施工桥梁——南京长江四桥引桥施工控制为例,针对悬臂拼装过程中的线形控制问题,明确施工过程中的主要控制内容及相应的精度控制目标,着重对施工控制网的建立、架桥机挠度检测、几何控制数据基础的选择、梁段定位测量、误差修正等内容进行研究。以最终线形控制结果为依据,评价所用测控方法,为今后悬臂拼装施工技术在类似工程中的应用提供参考。
分段施工;悬臂拼装;线形控制;误差修正
南京长江四桥是国内首座跨度超过千米的三跨悬吊悬索桥,其南引桥长1 489.6 m,北引桥长1 313 m。根据设计和施工控制的要求,将南北引桥划分为2 122块短梁段,其中预制2 054块,现浇68块。施工时,首先采用短线法[1-2]预制,再将梁段运至桥位处进行悬臂拼装。以桥墩顶部的起始梁段为中心将整跨梁段分为左、右两臂拼装,最终通过张拉预应力形成一个较长的“T”形结构的平衡悬臂。每两个相邻悬臂间通过现浇合拢梁段和两道现浇湿接缝[3]相连接,并张拉合拢预应力,形成连续的多跨桥梁。该项施工技术在国内应用较少,且桥梁建造的现代施工工艺对测量精度和施工控制的方法提出了较高要求,因此本文对悬臂拼装施工的控制网布设、拼装测量方法、误差修正等关键技术进行探讨。
1 悬臂拼装控制内容及精度
根据悬臂拼装施工技术的定义及南京长江第四大桥引桥施工具体操作要求,制定其控制流程如图1所示。
由图1可以看到,悬臂拼装阶段的主要测量内容包括:架桥机挠度检测、起始梁段精确定位、对称悬臂姿态测量及预应力张拉后验收等。
悬臂拼装施工精度严格按照中华人民共和国建设部发布的《预应力混凝土桥梁预制梁段逐跨拼装施工技术规程》[4]及《公路工程质量检验评定标准》[5]要求,对梁段的空中姿态进行调整控制。具体空间位置控制验收标准及验收方法如表1所示,其中L为梁跨径。
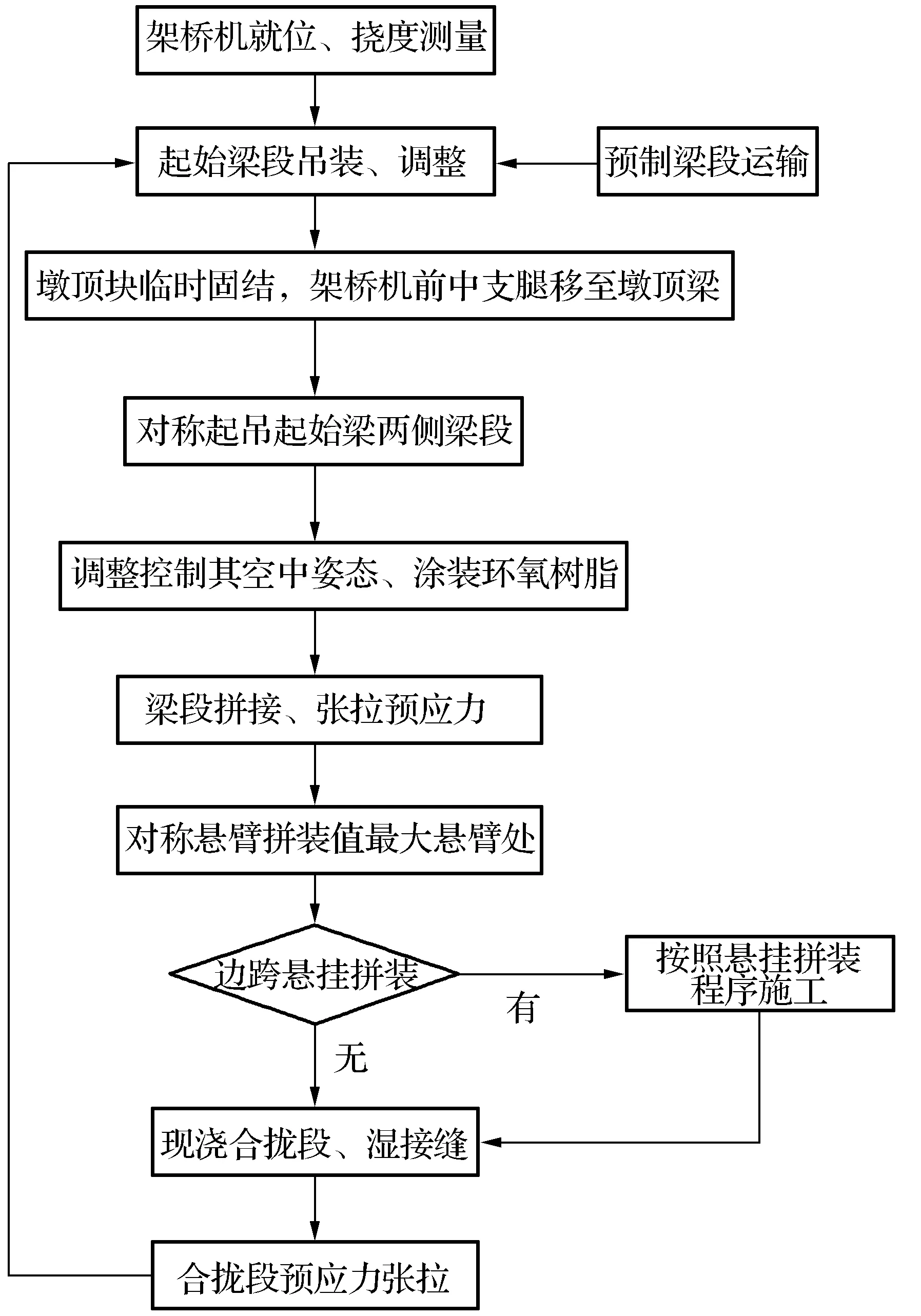
图1 悬臂拼装施工流程
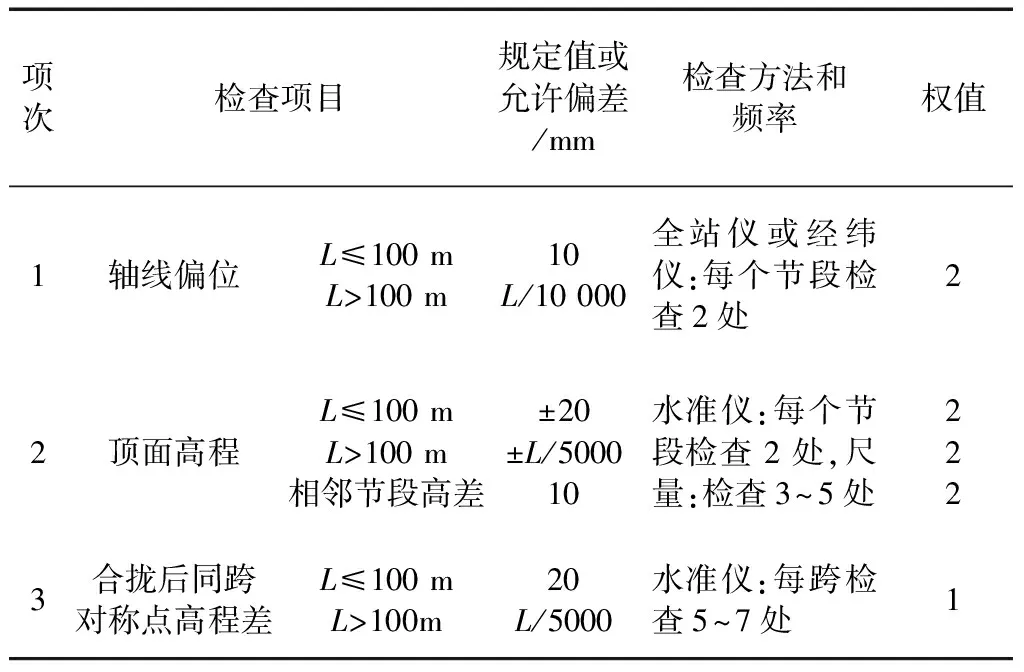
表1 悬臂拼装施工控制精度
2 悬臂拼装测控基础
2.1 施工控制网的建立
南京长江四桥位于长江下游,概略位置为N 32°08′~32°15′,E 118°54′~118°58′。根据相关技术研究,在悬臂拼装阶段首级控制网的必要精度应达到±5 mm[6-7]。因此,根据施工控制需要,布设如图2所示的悬臂拼装施工控制网,点位条件能满足GPS观测及全站仪测量、施工放样通视条件的需要,全部布设为带强制对中底盘的观测墩。
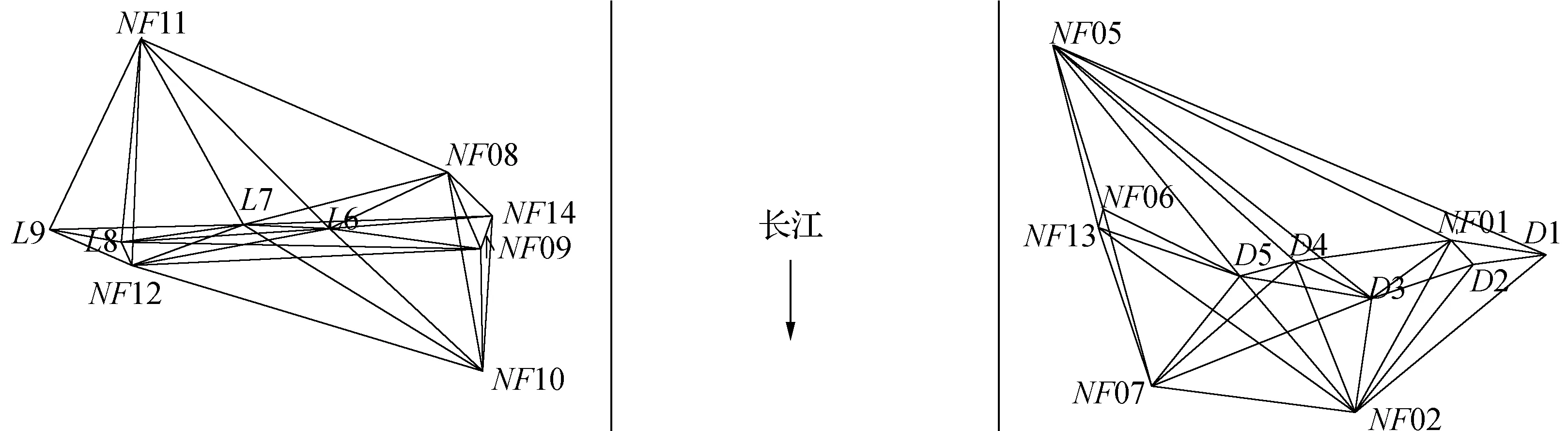
图2 悬臂拼装平面控制网
为保证引桥测量成果与主桥统一,以主桥首级控制点(NF05、NF06、NF07、NF08、NF09、NF10)为起算数据,用4台Trmible GPS接收机(标称精度为5 mm+1 ppm),以同步环重复边和图形链接方式,按照《公路勘测规范》中的二等GPS控制网要求施测。
高程控制网与平面控制网使用的控制点一致,采用精密水准的方法按照国家二等水准要求严格施测。
随着悬臂拼装施工进度的开展和观测条件的限制,需要将地面控制点传递至桥墩顶部或已完成预应力张拉的梁段上,此时加密的方法可以采用测角前方交会、测边前方交会、全站仪自由设站交会、角度后方交会法或导线法等[8]。不同的加密方法对控制点精度的影响不同,因此在实际应用时,应根据具体情况选择对观测结果影响最小的方法。
2.2 架桥机挠度监测
悬臂拼装施工时,架桥机的性能将直接影响施工进度、悬臂拼装质量、桥梁设计和结构分析计算。为了减少架桥机自身的变形对梁段拼装线形的影响,需要在架桥机空载、梁段拼装完成后及解构后测量其挠度值。挠度是指弯曲变形时横截面形中心沿与轴线垂直方向的线位移,即梁、桁架等受弯构件在荷载作用下的最大变形量。架桥机挠度值测量控制点分布如图3所示。利用水准仪测量出其相对高程值,根据两点之间的距离,换算成挠度变形量。

图3 架桥机挠度变形测量控制点
2.3 几何控制点数据基础
根据理论研究,连续桥梁可以利用梁段的中心线及其顶面的横坡来组合表示桥梁在三维空间内的线形与姿态。因此,悬臂拼装施工需要控制的是梁段顶面中心线及中心线在接缝处顶面的横坡。根据以上原理,在梁段预制时预埋如图4所示的几何控制点,连接位于梁段顶面中心线上的点FH及BH,作为梁段的轴线控制线,以此控制梁段在平面内的转角;分别连接点FL、FR及BL、BR组成两条高程控制线,控制梁段立面线形和接缝处的横坡。测量出其在预制坐标系下的坐标值,并建立与桥梁整体坐标系之间的转换关系用于悬臂拼装。

图4 悬臂拼装几何控制点
3 悬臂拼装控制测量
悬臂拼装定位测量,在墩顶加密控制点上架设全站仪,并用多个后视点进行定向校核,根据精密三维坐标法测量出梁段顶面控制点的坐标,与设计拼装位置相比并进行调整,如图5所示。

图5 悬臂拼装测量示意图
高程控制时,先将地面高程控制点通过同时对向三角高程观测法传递至桥墩顶部,然后结合精密水准测量方法,进行控制点高程控制。
3.1 起始梁段定位
起始梁段作为整跨梁段悬臂施工的起点与基础,其空间定位误差将对整跨的线形产生巨大影响。由于其具有结构及受力情况复杂、施工工序环节多、施工条件差等特点,施工过程中需要有高精度的测量控制方法。因此起始梁段的定位精度要求比普通梁段高,具体要求如表2所示。
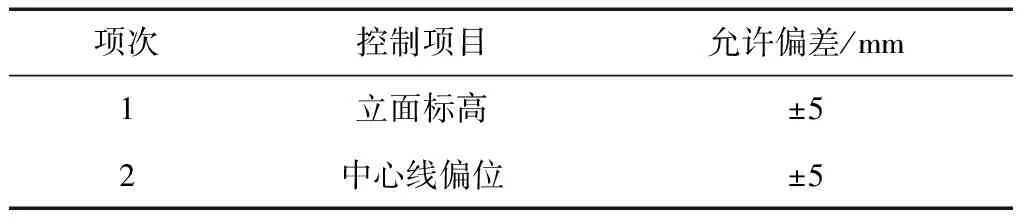
表2 起始梁段定位允许误差
桥梁下部结构施工完毕后,需要检查临时支座标高、永久支座垫石标高,打磨平整超高部分。先用全站仪放样出桥轴线位置,并在墩顶上标示,为起始梁段定位做好准备(见图6)。具体调整步骤如下:
1)起吊起始梁段进行粗定位。通过设置在墩顶上的油压千斤顶调整,使梁段轴线与墩项预先放样出的桥轴线对齐。梁段粗定位需要多次调整趋近,控制限差为平面位置偏差为±20 mm,标高位置偏差为±30 cm。
2)利用平面控制网和高程控制网,用精密三维极坐标或前方交会法测量起始梁段顶面6个控制点的平面位置坐标值,高程控制时采用水准测量方法放样。观测梁段偏位情况,按照桥梁设计要求计算出定位调整值。根据计算值用梁底的调位千斤项,对梁段进行精确定位,使其满足控制精度要求。采集最终控制点坐标值,了解梁段安装的误差,为后续梁段拼装提供依据。
3)起始梁精确定位后,进行永久支座上座板及临时支座灌浆,并拆除底部千斤顶,张拉临时锚固预应力,最后进行梁段第二次浇筑。

图6 起始梁段定位
如表3所示为桥轴坐标系下,本项目中某跨起始梁段的最终定位情况,由表中的偏差情况可以看出,该起始梁段的定位精度满足施工控制精度要求,可以进行第一对梁段的悬臂拼装。
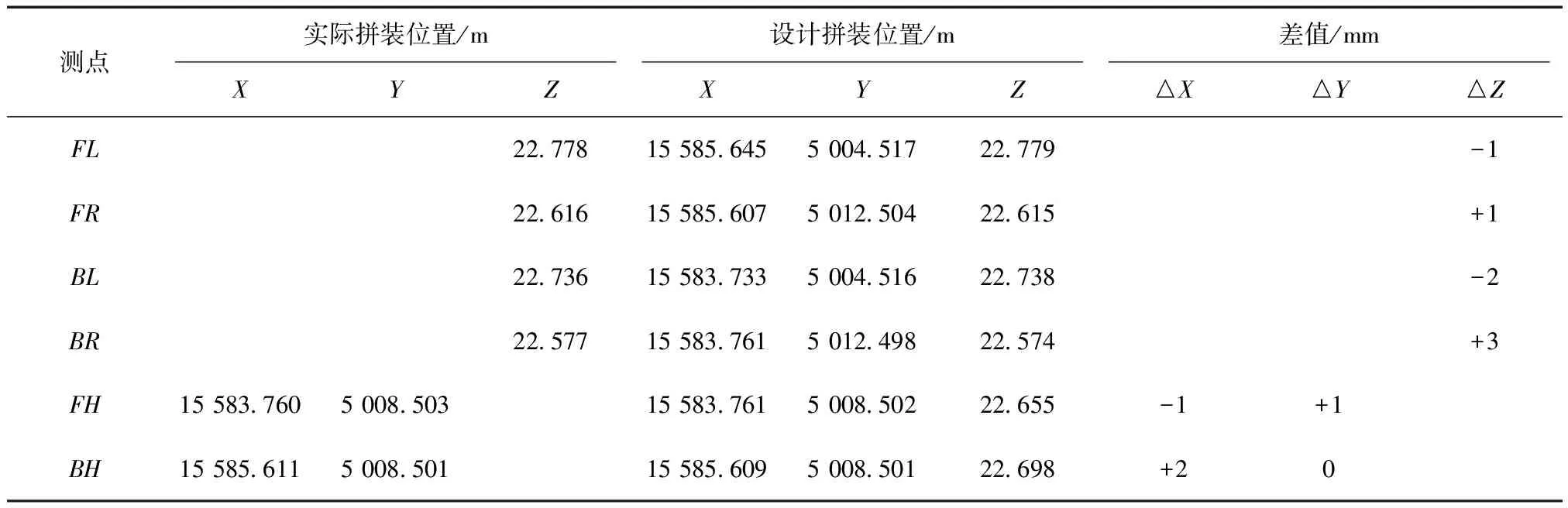
表3 桥轴坐标系下起始梁段实际安装值
3.2 平衡悬臂T构拼装
起始梁段精确定位后,在其基础上利用架桥机逐对起吊左右相邻两块梁段进行悬臂拼装,具体拼装步骤如下:
1)起吊1号梁段,在纵向及横向上接近设计空间位置,并使其下缘略高于桥面标高,且与起始梁段间预留150 cm的空隙。
2)在1号梁段与起始梁段的匹配面上均匀快速的涂抹3 mm厚的环氧树脂。
3)按照梁段短线法预制时1号梁段与起始梁段间的相对位置关系及桥梁整体线形,计算拼装阶段的梁段顶面6个控制点的几何数据,根据其指导放样定位1号梁段空间姿态。在施工现场控制点上架设全站仪和水准仪,按照表1中的精度限差要求进行施工控制调整。若误差在允许范围内,按结构设计图张拉临时预应力,进行下一梁段的拼装(见图7)。
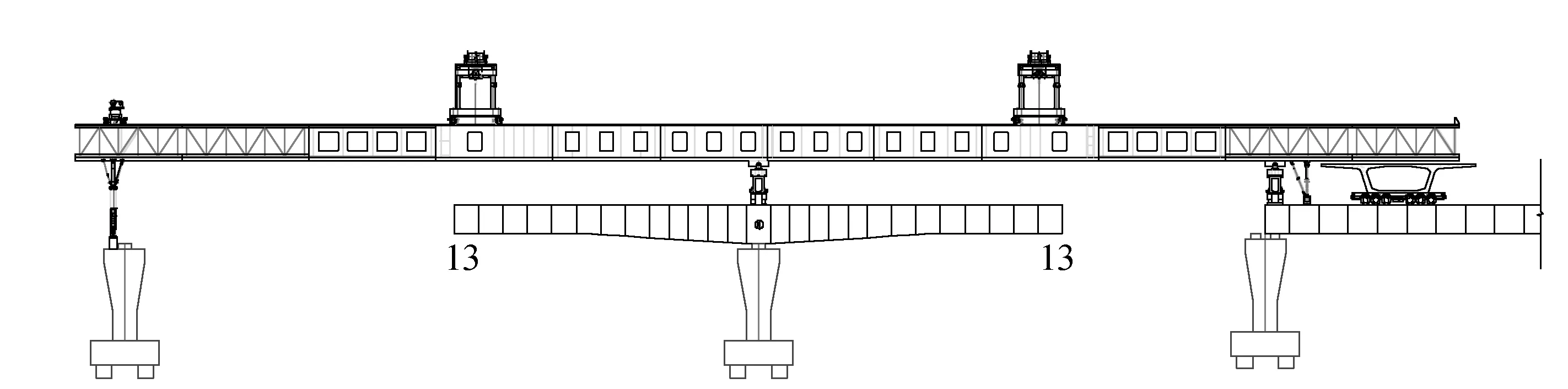
图7 对称悬臂拼装
4)起始梁段对称方向的-1号梁段悬臂拼装,按照步骤1)至3)重复进行,并按照永久结构设计图张拉永久预应力;
5)对于整跨内剩余的梁段,采用步骤1)至4)对称悬臂拼装。
表4及表5为桥轴坐标系下,某跨中1号梁段和-1号梁段的最终定位情况,可以看到其定位精度均满足施工控制要求,可以进行循环对称悬臂拼装,直至达到最大悬臂处。
4 悬臂拼装误差修正
每对称安装完成一对梁段后,需将梁段上6个控制点的实测安装坐标值与设计安装位置进行分析对比,计算出每块梁段顶面控制点的误差,根据误差大小,采用相应的调整方案。如果偏差值不足以影响该跨内后续梁段的拼装,可以待整跨梁体全部拼装完成后统一用湿接缝进行调整。如果确认下一梁段拼装时需要进行纠偏,梁段线形调整的方法有:
1)加垫环氧树脂垫片(如图8所示)。以立面调整为例,计算垫片调整高度。由于垫块很薄,所以

(1)
得到:
h=bL/H.
(2)
式中:b为垫块的厚度;H为梁段高度;L为梁段长度;h为该梁段可调高度。

表4 桥轴坐标系下1号梁段实际安装值
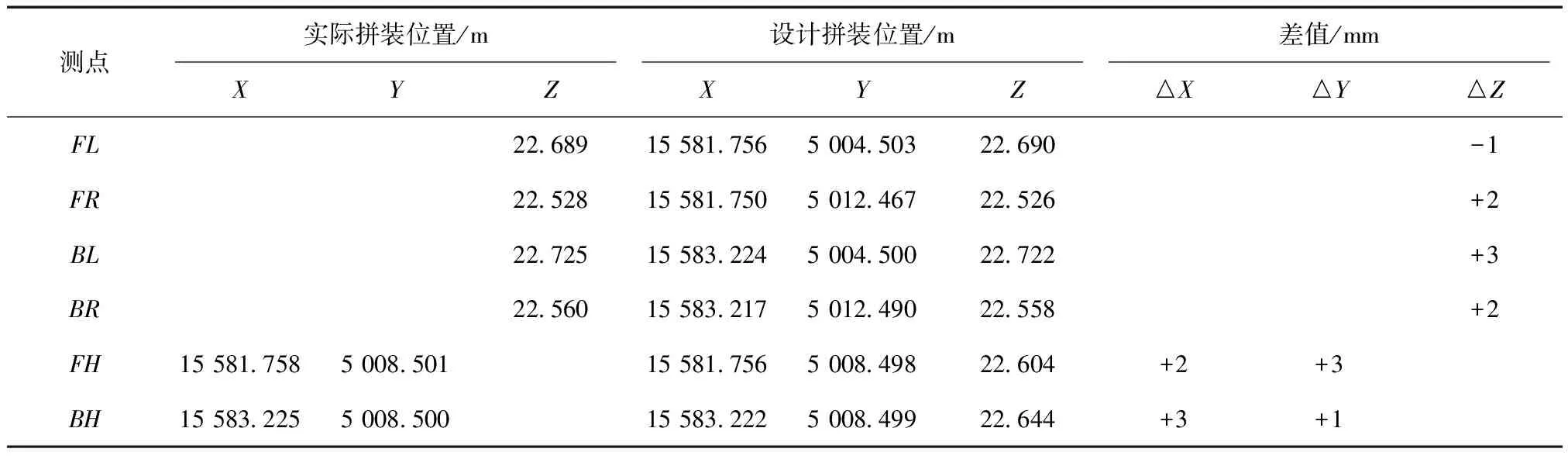
表5 桥轴坐标系下-1号梁段实际安装值
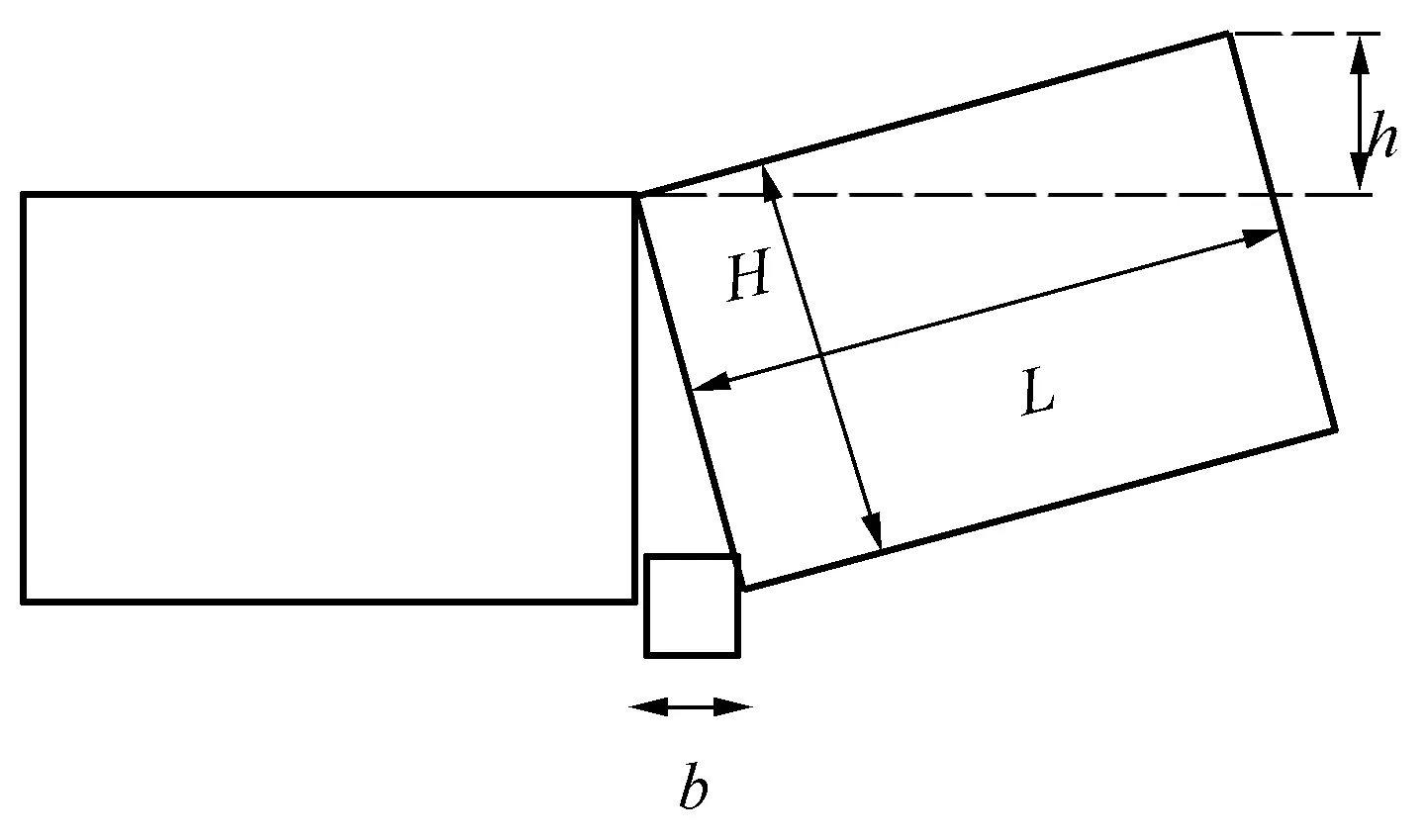
图8 悬臂拼装误差垫片修正法
梁段平面位置调整时,将式(2)中的高度替换为梁段宽度即可。
利用增加垫片的方法可以调整悬臂拼装过程中的误差,但是调整范围仍然很小,因此拼装过程中需要进行高精度的控制。
2)控制临时预应力张拉。在梁段不需要调整的情况下,以上下左右对称张拉为原则,以尽量保证梁段的正位;当需要调整线性误差时,张拉的顺序以先张拉能使梁段向控制方向偏转的临时拉杆为原则,以利于校正误差。
3)其它方法。若梁段拼好后,梁段拼装误差还需要调整,可以适当压重,进行竖向调整。
4)增设湿接缝。当梁段线形发生主要定位错误或者线形误差较大,用以上办法均无法纠偏时,需用湿接缝的方法,增设的湿接缝一般宽50 mm,应设在两段梁段之间并采用无收缩水泥砂浆。
5 悬臂拼装控制线形分析
为验证文中所述悬臂拼装阶段测控方法,评价桥梁悬臂拼装线形,可以通过分析梁段顶面控制点的实际悬臂拼装位置与设计悬臂拼装位置的差值来得到。以本项目中某跨的悬臂拼装为例,分别将其顶面4个高程控制点的实际拼装高程与设计拼装高程的差值、2个轴线控制点的实际拼装平面位置与设计拼装平面位置的差值绘制成偏差图,如图9、图10所示。
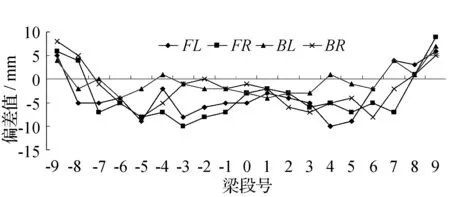
图9 悬臂拼装高程误差曲线
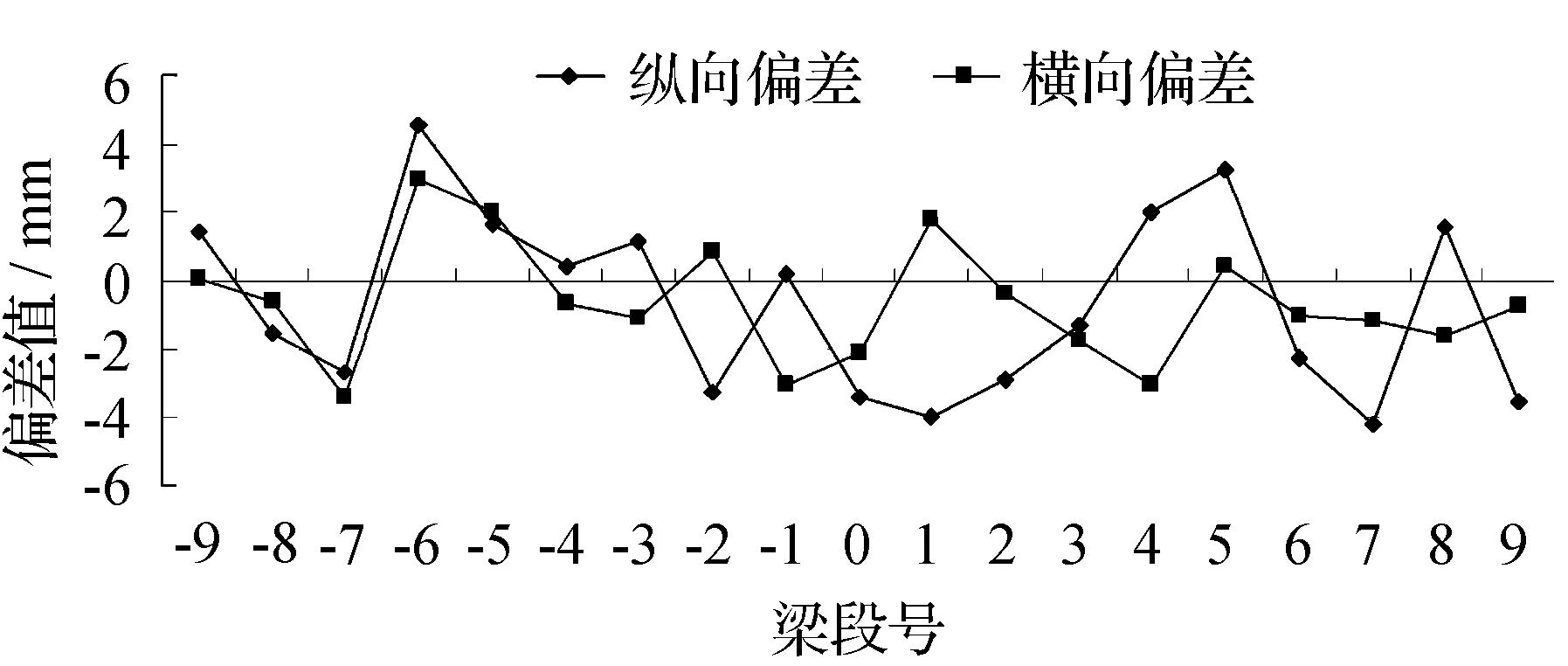
图10 悬臂拼装平面误差曲线
由图可见:
1)由于起始梁段采用了较高精度的测控方法,靠近起始梁段的节段拼装误差小,误差值离起始梁段越远效果越明显,但是未出现较大的累积误差,整体偏差量呈波浪形;
2)各测点标高方向误差最大为10 mm,最小为0 mm,在整跨最大悬臂处均出现了较大的正偏差,但是满足误差控制标准[-15 mm,+15 mm]的要求;
3)对于平面内的偏差值,较大部分均能控制在[-5 mm,+5 mm]内,且纵桥向的控制精度要优于横桥向的控制精度。
6 结束语
在本项目悬臂拼装施工时用文中的测控方法能够控制施工过程中各项误差的影响,达到很好的线形控制效果,各项精度均能满足竣工验收标准。
[1]方蕾.短线预制悬臂拼装连续梁桥施工线形控制研究[D].成都:西南交通大学,2008.
[2]王雄.短线法预制梁施工[J].中南公路工程,2005(1):97-100.
[3]林辉源.先简支后连续桥梁湿接缝的设计与施工[J].华东公路,2002(3):24-26.
[4]上海市第一市政工程有限公司.CJJ/T 111-2006预应力混凝土桥梁预制节段逐跨拼装施工技术规范[S].北京:中国建筑工业出版社,2006.
[5]交通部公路科学研究所.JTGF80/1-2004 公路工程质量检验评定标准[S].北京:人民交通出版社,2004.
[6]郑德华.特大型桥梁首级平面施工控制网的必要精度研究[J].测绘通报,2003(6):20-23.
[7]黄腾,梅红.特大桥钢索塔建造精密测控技术[M].北京:科学出版社,2012:127-128.
[8]冯兆祥,钟建驰,岳建平.现代特大型桥梁施工测量技术[M].北京:人民交通出版社,2003:64-71.
[责任编辑:张德福]
Measurement techniques of free cantilever erection in the Fourth Nanjing Yangtze River Bridge
LIU Ling, ZHENG Yong-feng
(Zhejiang Electric Power Design Institute, Hangzhou 310012, China)
For the Fourth Nanjing Yangtze River Bridge, a segmental construction is taken as an example.With regard to the lineshape control in the free cantilever erection, the main control contents and precision objectives during the process of construction are discussed, and the following aspects are highlighted: construction control network, deflection measurement of bridge-erecting machine, data usesd to controlled, positioning of segments and error correction.Based on the results, the measurement techniques used will cover the similar projects.
segmental construction; free cantilever erection; lineshape control; error correction
2013-08-08
刘 岭(1987-),男,硕士研究生.
P22
:A
:1006-7949(2014)09-0056-06
猜你喜欢
价值工程(2022年25期)2022-09-01
铁道建筑技术(2021年3期)2021-07-21
科学技术创新(2021年14期)2021-05-28
西部交通科技(2021年9期)2021-01-11
建材与装饰(2020年27期)2020-09-26
广西大学学报(自然科学版)(2020年1期)2020-05-29
安徽建筑(2019年5期)2019-06-17
小哥白尼(趣味科学)(2018年2期)2018-05-25
科学中国人(2016年18期)2016-12-23
工业设计(2016年4期)2016-05-04