
基于PD运动控制算法的装配机器人设计
2014-08-14 06:05:42吕立新王程民
重庆科技学院学报(自然科学版) 2014年3期
吕立新 李 庆 李 路 王程民
(1.安徽商贸职业技术学院电子信息工程系, 安徽 芜湖 241002;2.淮安信息职业技术学院机器人研究所, 江苏 淮安 223003)
机器人是融合机械设计、自动控制技术、微电子技术、传感测试技术等多个学科和领域的一门综合性的高新技术。装配机器人可按给定的引导线运动至物料存放处,完成物料的搬运后,再运动到相应的安装工位,完成产品的装配。随着工业生产技术的发展,装配机器人在工业生产领域中的应用将越来越广泛。
本文结合2013年全国职业院校机器人应用技术大赛的任务要求,综合运用物联网、颜色识别和精确定位等技术开发了一种装配机器人,完成了机器人的机械系统、电路系统和传感系统的设计,并在此基础上设计了一种基于PD控制原理的机器人运动控制算法。该算法可使机器人准确地进行路径识别和运动控制,从而实现对工件的精确定位,完成工件的抓取、颜色识别和精度装配等一系列任务。
1 机器人硬件系统设计
装配机器人一般需要根据工作场地上的白色引导线自主进行路径识别和姿态控制,还必须能对工件的位置进行精确定位并识别工件的颜色,从而抓取正确的工件进行精度装配。要设计出满足要求的机器人,首要任务是完成机器人的硬件系统设计,包括机器人的机械结构设计和电路控制系统设计。机械结构设计主要是完成运动机构和执行机构的三维建模、动态仿真、零件加工及装配;电路控制系统设计主要包括机器人的主控制电路、传感器电路及电机驱动电路的设计。
1.1 机器人机械结构设计
一种高性能的机械结构不仅能简化控制算法设计的复杂性,还能提高机器人运行控制精度。机器人的机械结构三维模型如图1(a)所示,图1(b)为加工装配完成的机器人实体。机器人的机械部分主要由运动底盘、导轨提升机构、推送机构、工件抓取机构、工件存放机构和定位机构组成。所有的零件均在SolidWorks2012中进行三维建模,并进行装配仿真,确认尺寸无误后生成CNC机床加工文件进行加工。
1.2 机器人电路控制系统设计
机器人的电路控制系统主要由主控制板电路模块、巡线控制模块、定位控制模块和电机控制模块组成,其结构如图2所示。主控板是机器人的处理中枢,负责接收、处理各类传感器采集到的信息,并根据信息处理结果向各执行机构发送控制指令。主控制板使用新一代高速、低功耗单片机STC12C5A60S2作为微控制器,该控制器的指令代码完全兼容传统8051,但运算速度可达传统8051单片机的12倍,芯片提供了2路PWM输出和8路高速10位AD转换,内部集成了MAX810专用复位电路,大大简化了外围电路的设计。在主控制板中使用了2片74H245芯片实现对P2口的复用,使用P1.0引脚进行片选控制,实现对16路巡线传感器数据的读取。使用单片机的P3口和P0口的部分引脚和高速光耦芯片扩展了8路支持12V电平输入的传感器接口以满足信号的输入需求。
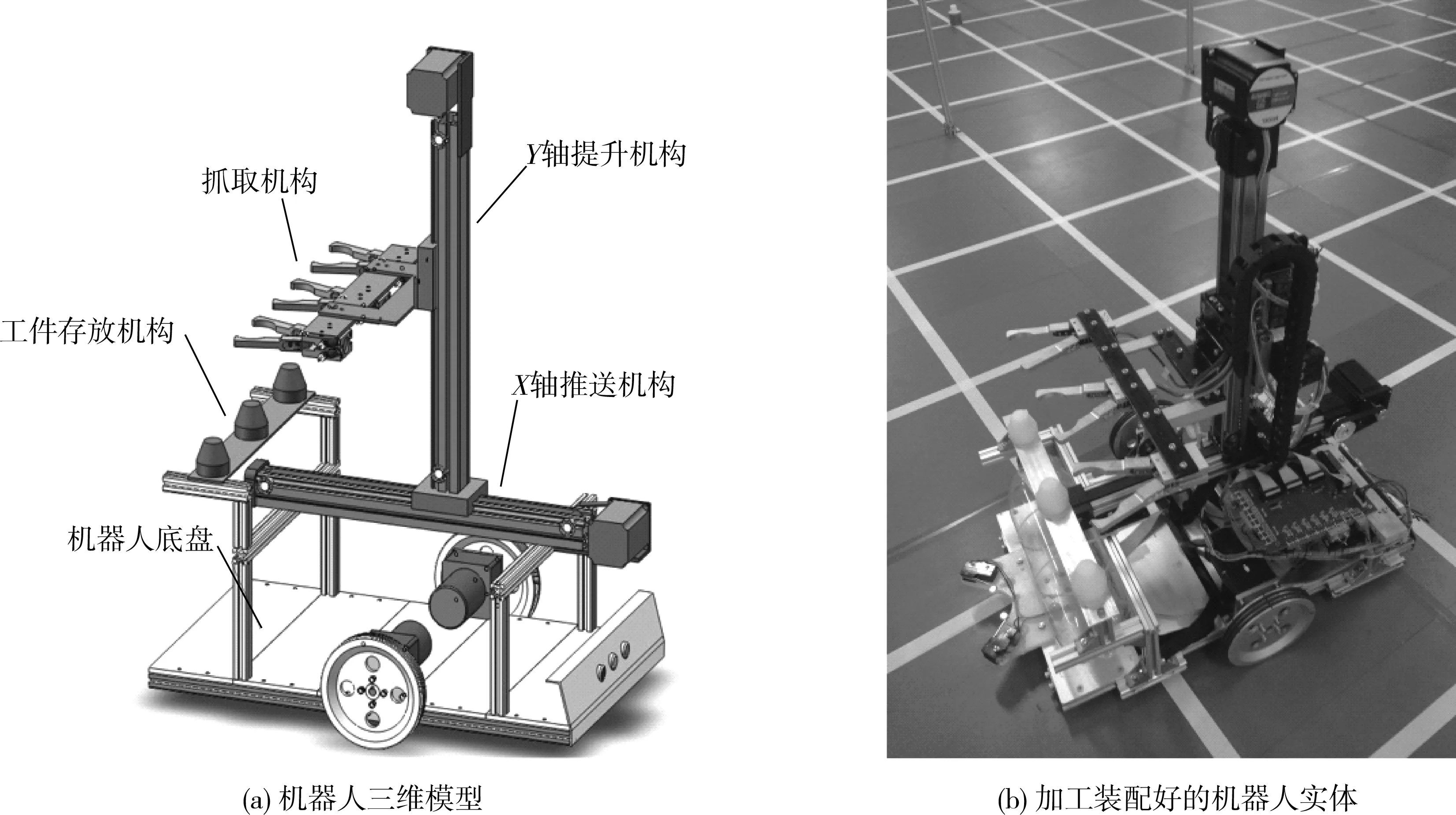
图1 机器人机械组成结构图
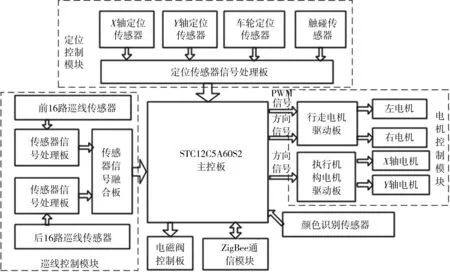
图2 机器人电路控制系统组成框图
巡线控制模块主要包括安装于机器人底盘下的2个16路引导线检测传感器、2个传感器信号处理板和一个传感器数据融合板。16路引导线检测传感器可检测到场地上的白色引导线及十字交叉点,其电路非常简单,使用16路的高亮LED发射管作为发光源,使用16路光敏电阻接收从地面反射回来的光线,将反射光线的强弱转变成电信号传送到传感器信号处理板,对16路引导线检测传感器采集到的地面引导线信息进行处理,对光敏电阻接收到的电压信号进行放大处理,然后将放大后的信号与标准电压比较,过滤掉环境中的干扰信号后,再将有效信号进行稳压、放大处理后送入传感器融合板。单路信号的放大和比较电路原理如图3所示。传感器数据融合板将传送来的信号进行暂存,然后输入到主控制板的对应接口。传感器数据融合板使用了4片74HC245芯片,分别用来存储前16路和后16路巡线传感器的数据,通过一个片选信号来控制将哪路信号输入到主控制板。
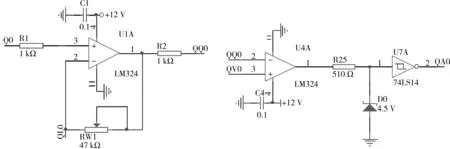
图3 单路信号的放大和比较电路原理图
电机控制模块主要由行走电机驱动板、执行机构电机驱动板和电机组成。电机驱动板通过主控板发来的PWM脉宽调制信号和方向信号,驱动行走机构和执行机构的直流电机。电机驱动板电路原理如图4所示,电机驱动板上设置了2路MOS管电路,使用IR2110功率驱动集成芯片。该芯片是一种双通道、栅极驱动、高压高速功率器件的单片式集成驱动模块,可靠性很高。IR2110输入信号为主控制器输出的PWM脉宽信号,其输出信号直接控制75N75MOS管的通断。电机转动方向的控制是使用三极管驱动继电器来实现的,这种方式较MOS管桥式电路更可靠。

图4 电机驱动板电路原理图
定位控制模块主要由位于X、Y、Z轴上的3个光电检测传感器,2个用于车轮定位的红外检测传感器,用于定位检测的2个触碰传感器和1个传感器数据处理板组成。光电传感器用于采集机器人执行机构的当前姿态,当执行机构运行到指定姿态时传感器将发送信号给传感器数据处理板。车轮定位传感器使用两个红外检测开关检测机器人的当前运行姿态是否在引导线上,用来辅助机器人进行90°转弯。定位检测传感器用于检测机器人是否运动到了工件存放位,从而为后面的工件抓取和装配提供帮助。定位传感器数据处理板主要是对采集到的各传感器信号进行放大,然后通过多通道选择芯片将采集到的传感器信号输入到主控制板的外部中断引脚。
ZigBee模块使用CC2530芯片,通过串口与主控板通信,主要用于接收上位机发来的任务指令。使用日本基恩士公司的CZ-V21A型光纤颜色识别传感器和CZ-H32信号放大器构建颜色传感器系统,用于识别工件的颜色。
2 机器人运行控制程序设计
机器人的运行控制程序主要包括行走控制程序、执行机构运动控制程序和定位控制程序。行走控制程序是对机器人运动过程中的姿态调整进行控制,使机器人按规划好的路径行走。执行机构运动控制程序是控制执行机构运动以达到抓取工件的目的。定位控制程序为行走控制程序和执行机构运动控制程序提供帮助,使机器人达到理想的控制姿态,从而完成转弯、抓取工件等任务。
2.1 基于PD的巡线行走控制算法
行走控制算法是控制机器人沿白色引导线按给定的速度稳定运行。由于机器底盘安装精度、电机性能差异等因素的存在,机器人的左右驱动轮子的转动速度不可能完全一致,因此即使主控板以相同的PWM信号驱动2个行走电机,也会使机器人的姿态偏离引导线。行走控制算法是通过安装在机器人底部前后各16路传感器获取机器人的当前运动姿态,计算机分析机器人当前姿态与引导线的偏移量,控制机器人从当前姿态向理想的姿态转换。
机器人巡线算法主要解决两个问题,一个是机器人运动方向的控制,一个是机器人运动速度的控制。方向和运动速度的控制均采用PD(比例、微分)控制。在方向控制上首先读取前后16路巡线传感器的状态数据,来确定机器人当前的状态,机器人在白线上的状态可能处于正常状态、左偏状态或右偏状态。
不同状态下巡线传感器的状态数据也不同,通过将当前状态下传感器的数据与正常状态下的基准值进行比较,从而确定方向控制参数比例因子Pdir,然后再将状态调整前传感器的值与状态调整后传感器的值进行比较处理,从而确定方向控制参数微分因子Ddir,在确定PD控制参数后,巡线算法会给左右电机不同的PWM脉宽信号,从而在左右轮上产生差速度来调整机器人的状态向正常状态变化。速度控制是根据电机的实际输出速度与给定速度的差确定速度控制比例因子Pspeed和速度控制微分因子Dspeed,通过PD参数控制电机的PWM脉宽值,使电机实际输出速度逐步过度到给定速度。整个巡线控制算法框图如图5所示。
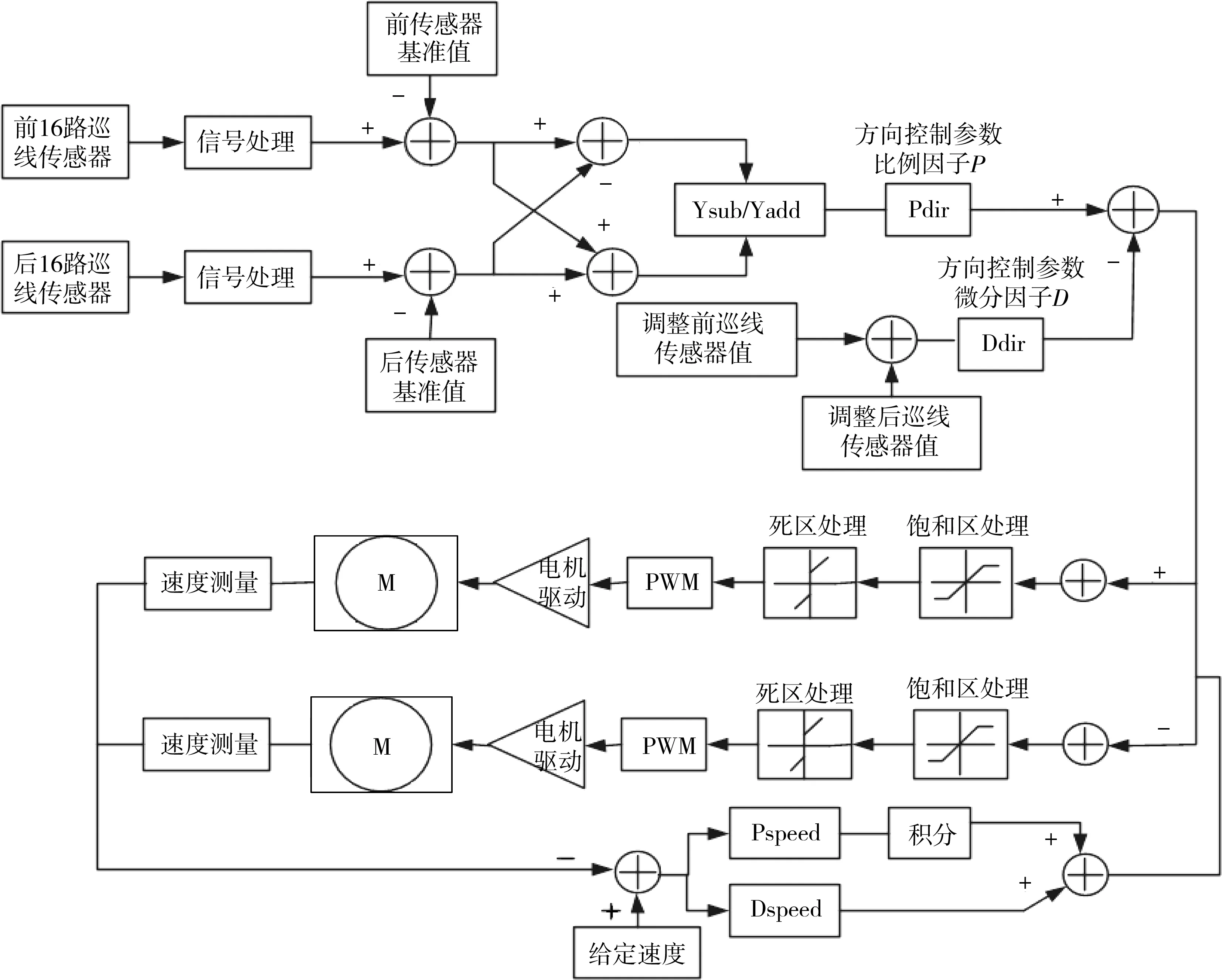
图5 巡线控制算法控制框图
2.2 机器人转弯控制算法
当机器人完成预定的行走里程时,需要转弯进入另外一条交叉的引导线,此时机器人的运动姿态相对于引导线必须进行一个90°的转弯过程,为了使其轴线尽量与引导线对齐,应使机器人的旋转中心与交叉引导线的交点重合,这样机器人在转90°后可以保证其运行姿态的正确性。为了达到这一目的,使用2个光电传感器来进行车轮的辅助定位,即当2个车轮定位传感器均在白线上时,才进行90°转弯。转弯控制算法流程如图6所示。
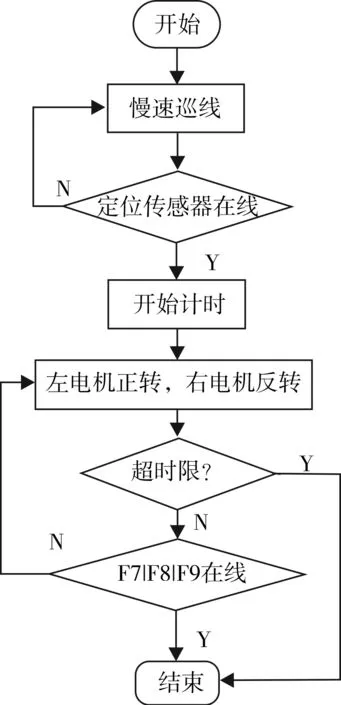
图6 机器人转弯算法流程图
2.3 机器人执行机构运行控制算法
当机器人运动到指定的工件存放位时需要运行执行机构控制程序,实现工件的抓取。由于本次任务需进行工件的装配,因而对机器人在工件存放位的定位精度要求比较高。执行机构运行控制算法的流程如图7所示。机器人运到指定的货柜后,首先判断位于机器人前端的两个定位叉中的两个触碰开关是否接触到了货柜的定位柱,如果没有接触到定位柱则进行姿态调整。当定位满足要求时,运行上肢运动程序,调整机械手在X轴和Y轴上的距离,使得机械手达到抓取状态,机械手通过电磁阀的通断控制气流实现工件的抓取。
3 结 论
本文给出一种装配机器人的机械结构设计、电路系统设计和控制程序设计方案。设计完成的机器人在参加全国机器人技术竞赛的过程中经受住了比赛环境中各种干扰因素的考验,取得了全国二等奖的优异成绩。基于PD的机器人运行控制算法可以可靠地控制机器人根据引导线自主运动,其控制的稳定性和定位的准确性非常好,为物料搬运、工件装配等工业机器人的设计提供参考。
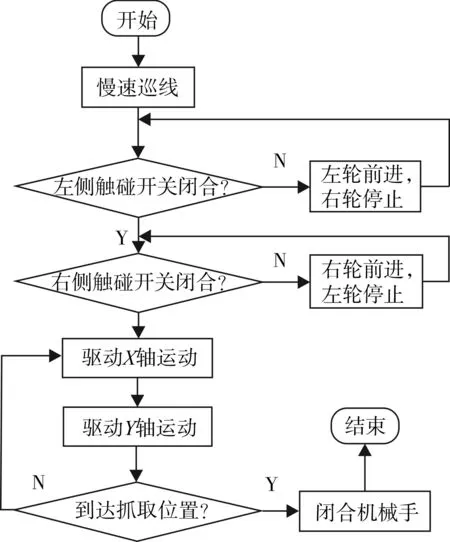
图7 机器人执行机构算法流程图
[1] 宋波.基于MSP430的自动巡线机器人研制[D].成都:西南交通大学,2006.
[2] 张万英.两轮自平衡机器人模糊PD控制方法研究[D].哈尔滨:哈尔滨理工大学,2012.
[3] 徐达,帅元,郝琢.弹药装填机器人自适应PD控制算法[J].装甲兵工程学院学报,2011(1):49-53.
[4] 陈启军,王月娟,陈辉堂.基于PD控制的机器人轨迹跟踪性能研究与比较[J].控制与决策,2003(1):53-57.
[5] 李鹏,郝骞,任一峰.自平衡机器人的模糊-PD控制[J].电子测试,2011(7):97-100.
猜你喜欢
天然气与石油(2022年5期)2022-11-01 09:03:00
天然气与石油(2022年4期)2022-09-21 07:05:54
中国电业与能源(2021年4期)2021-05-22 00:39:42
装备制造技术(2020年4期)2020-12-25 05:26:02
广西电业(2020年11期)2020-03-23 07:14:14
无人机(2018年1期)2018-07-05 09:51:06
电测与仪表(2015年3期)2015-04-09 11:37:48
武夷学院学报(2014年5期)2014-07-19 10:08:30
导航定位与授时(2014年2期)2014-04-27 13:41:08
中国造纸(2014年1期)2014-03-01 02:10:04
