
张培萌与劳义百米技术时空特征对比分析
2014-08-13 05:39李亚坤詹晓梅曾晓梅
体育教育学刊 2014年4期
李亚坤,詹晓梅,王 双,曾晓梅
(江西师范大学 体育学院,江西 南昌 330022)
2010 年 11 月 22 日,劳义在广州亚运会田径赛场上以10秒24的成绩夺得中国田径历史上首次亚运会男子100m 金牌,中国田径终于在亚运会赛场上书写了新的篇章。 2013年9月8日,第12届中华人民共和国全国运动会,张培萌在田径男子百米决赛中以10秒08勇夺冠军,成为中国百米赛场上“跑的最快的人”。在2013年的莫斯科世锦赛百米半决赛上他更是跑出了10秒整的好成绩,打破了全国纪录,也是黄种人在国际田径赛事上跑出最好的百米成绩。遗憾的是,张培萌在三组选手中名列第九,成绩与第八名的法国选手勒迈特相同,但因为千分之一秒之差而遗憾地无缘决赛。本文主要对2013莫斯科田径世锦赛张培萌和2010年广州亚运会劳义两人的100 m技术特征进行对比分析,为完善他们的技术动作,提高运动成绩提供理论参考。
1 研究方法
(1)资料获取:2013莫斯科田径世锦赛张培萌100m半决赛视频通过 CNTV 中国网络电视体育台下载获得,2010年广州亚运会劳义100m决赛视频通过 Iku 软件下载优酷高清视频播出的2010广州亚运会男子100m 决赛视频获得。
(2)资料处理: 通过格式工厂软件将2013莫斯科田径世锦赛张培萌100m半决赛视频 rmvb格式转化为 MPG 格式,将2010年广州亚运会劳义100m决赛视频 FLV 格式转化为MPG 格式,然后利用Dartfish、超级街霸V8软件对转换视频进行处理与分析,并记录相关数据。
(3)数据处理
平均步长=距离/步数;平均步频 = 步数/( 运动员成绩-起跑反应时);步长指数 = 步长/身高;步频指数 =步频×身高;余步参照终点线宽计算。
2 研究结果与分析
2.1 张培萌与劳义100 m全程技术特征分析
根据动量矩定理 M×Δt = I×Δω,人体所受的外力矩作用的时间一定时,转动惯量越大,角速度越小,角速度与转动惯量呈反比关系。因此,短跑运动员中身材越高大的运动员下肢越长,下肢转动惯量就越大,步长则较大,下肢转动的角速度小,步频速率较低。表1显示,张培萌比劳义高13 cm,根据动量矩定理,张培萌步幅应比劳义大,劳义步频速率应比张培萌高,而研究结果表明,张培萌与劳义平均步长非常接近、平均步频略大于劳义。身高1.73 m的劳义用46.3步跑出了百米10秒24的成绩,张培萌1.86 m的身高用46.2步跑出10秒成绩。有资料显示,胡凯1.76 m,跑出10秒24时,用44.5步[3],可见,张培萌和劳义在步长方面都有很大的提升空间。
表1 张培萌与博尔特100m全程主要数据特征

运动员身高/m成绩/s全程步数/步平均步长/m平均步频步/秒平均速度m/s步长指数步频指数张培萌1.8610.0046.2002.1654.68710.001.1648.720劳义1.7310.2446.3072.1574.5999.931.2477.956差值0.13-0.24-1.070.008-0.88-0.07-0.0850.764
决定短跑速度的主要因素是运动员的步长和步频,这两个因素都与运动员身高相关。为了进一步客观反映步长、步频与速度的内在联系,采用了兼顾身高因素的步长指数和步频指数2项指标。表1显示,张培萌的平均步长与身高之比(即步长指数)为1.164,劳义的平均步长与身高比为1.247。根据苏联功勋教练员霍缅科夫的观点,优秀男子短跑运动员途中跑的步长同身高的比例是1.24-1.29[6]。张培萌的步长指数未达到优秀男子短跑运动员的范围,而劳义相对较好。步频指数张培萌要比劳义高,说明张培萌与劳义相比有较好的步频能力。提示张培萌应加强步长能力训练,提高步长指数;劳义有较好的步长能力,但步频能力相对较弱,在今后的训练中要加强步频能力训练,提高步频指数,从而提高跑速。
2.2 张培萌与劳义起跑和加速技术特征分析
起跑反应时的快慢直接影响运动员的运动成绩和随后加速跑技术的高质量发挥。表 2 显示,张培萌和劳义起跑反应时分别为0.143s 、0.170s,而目前世界高水平运动员起跑反应时介于 0.117-0.140s,可见,张培萌和劳义的起跑反应时比世界高水平运动员要长,这不利于完成随后的加速跑和途中路技术。因此,张培萌和劳义应重视起跑训练,最大限度提高起跑动作质量。
短跑起跑阶段过后紧接着进入加速阶段,加速能力反映了一名运动员的竞技水平,较强的加速能力能够使运动员更快地到达更高速度,从而领先于其他选手。
表2 张培萌与劳义100 m技术时间特征
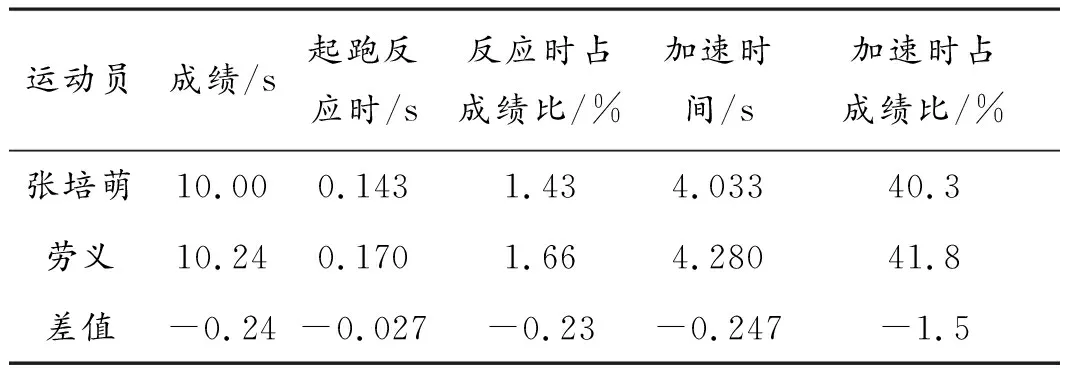
运动员 成绩/s起跑反应时/s反应时占成绩比/%加速时间/s加速时占成绩比/%张培萌10.000.1431.434.03340.3劳义 10.240.1701.664.28041.8差值-0.24-0.027-0.23-0.247-1.5
张培萌的加速时间比劳义少0.247s,加速时间所占成绩比比劳义低1.5%。说明张培萌完成加速跑时间更短,相比劳义更早进入了途中跑阶段,加速能力强于劳义,提示劳义应减少加速时间,提高加速能力。
2.3 张培萌与劳义途中跑支撑时期时空特征
2.3.1 途中跑支撑与腾空的时间比分析
表3 张培萌、劳义的支撑腾空比

运动员支撑时间(s)腾空时间(s)支撑腾空比张培萌0.0980.1201∶1.224劳义0.1000.1341∶1.340
跑步中的一个周期是由一个单步构成,包括两个单脚支撑和两个腾空时期。步频的快慢取决于支撑时间和腾空时间的长短。研究表明:“快速跑中支撑期和腾空期时间较为接近, 易于协调两腿的支撑与腾空,有利于提高步频和发挥速度。”国际优秀运动员途中跑中的支撑时间与腾空时间之比约为 1∶1.2。表3显示,张培萌支腾比为 1∶1.224,劳义为 1∶1.340,张培萌的支撑时间与腾空时间较接近,且均比劳义短。说明张培萌途中跑支腾比接近世界优秀运动员技术特征,而劳义支腾比相差较大。提示缩短支撑时间与腾空时间仍是劳义和张培萌途中跑技术训练的方向。
2.3.2 途中跑支撑时期各关节角度对比分析
跑的支撑时期分为缓冲阶段(着地瞬间至垂直瞬间)和后蹬阶段(垂直瞬间至离地瞬间)。脚着地瞬间是缓冲阶段的起始点,着地时各关节角度直接影响到运动员速度的发挥。研究表明,着地角偏小将导致着地时较长的缓冲时间,同时对地面造成较大的冲击力,无形加大了着地脚着地时的制动,影响短跑技术动作的连贯性,在一定程度上制约支撑腿肌肉力量的充分发挥,使水平速度受到极大的损失。由表4可见,张培萌与劳义途中跑阶段着地角分别为 69.3°和65.3 °,张培萌着地角大,能较好地缩短着地缓冲时间,保持较大的水平速度。劳义缓冲阶段支撑腿膝角从着地瞬间至垂直阶段角度变化幅度为7.9°,张培萌的变化幅度仅为5.8°,劳义的膝角缓冲幅度大于张培萌。尽管劳义着地角小,着地缓冲时间较长,使“刨地”动作不够积极,但其在支撑腿缓冲退让更加积极,使支撑腿主动肌初长度增加,有利于后蹬阶段肌肉收缩力量和速度的发挥。
表4 张培萌和博尔特途中跑支撑时期空间技术特征 (°)
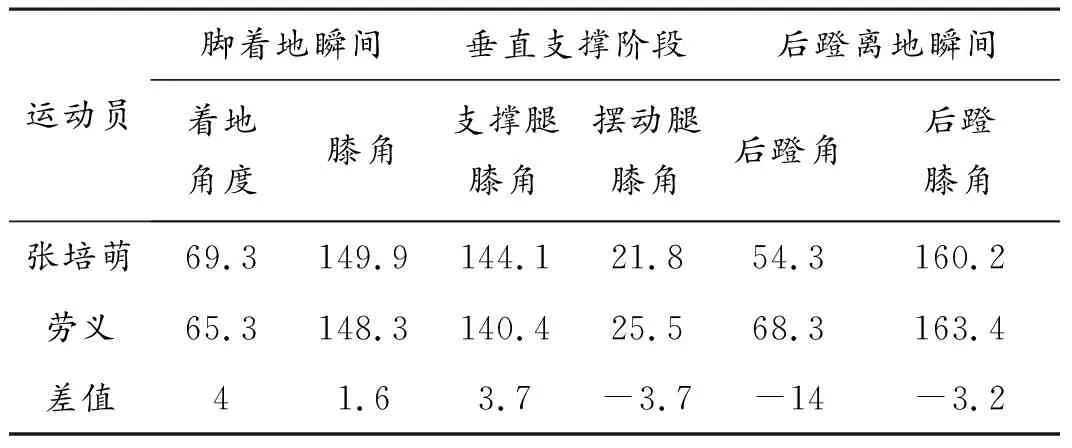
运动员 脚着地瞬间 垂直支撑阶段 后蹬离地瞬间着地角度膝角支撑腿膝角摆动腿膝角后蹬角后蹬膝角张培萌69.3149.9144.121.854.3160.2劳义65.3148.3140.425.568.3163.4差值41.63.7-3.7-14-3.2
垂直支撑阶段是后蹬阶段的开始,合理的支撑缓冲技术能优化百米运动员途中跑蹬摆技术效果,摆动腿膝角与摆动腿的摆动速度相关,摆动速度通过摆动腿的折叠程度来反应,折叠程度越高摆动速度越大,摆动腿摆速对身体水平位移速度有显著效果。从表4可知,张培萌的摆动腿膝角与劳义相差3.7°,张培萌的摆动腿折叠程度更高,充分发挥了股后肌群伸髋屈膝的收缩力量,摆动速度大,跑的水平速度快。
当身体重心移过垂直支撑点上方时,即进入了支撑腿的后蹬阶段。研究表明,后蹬角太大会增加后蹬时的垂直分力影响水平分力,使腾空时间和腾空距离延长降低跑速。张培萌离地瞬间后蹬角明显小于劳义,说明张培萌的后蹬动作发力充分向前,水平分力与劳义相比损失较少,水平速度较高。张培萌和劳义的后蹬膝角相近,分别为160.2°和163.4, “屈蹬”技术均发挥较好,在支撑末期及腾空期能保持较大的肌拉力角和肌拉力矩,从而提高大、小腿折叠的力量,缩短前摆半径,提高摆动腿前摆速度。
3 结论
张培萌和劳义在步长方面都有很大的提升空间,张培萌应加强步长能力训练,提高步长指数,而劳义应加强步频能力训练,提高步频指数。
张培萌和劳义的起跑反应时与世界高水平运动员相比差距较大,劳义加速能力较弱,今后训练应重视起跑技术,最大限度提高起跑动作质量和提高加速能力。
缩短支撑时间与腾空时间仍是劳义和张培萌途中跑技术训练的方向。与此同时,劳义应提高途中跑阶段支腾比例,减小与世界优秀选手之间的差距。
张培萌着地缓冲时间短,更有利于保持较大的水平速度,而劳义着地角小,着地缓冲时间较长,支撑腿缓冲退让更加积极,使后蹬阶段肌肉收缩力量增强,能更好发挥速度。
张培萌和劳义均有良好的“屈蹬”技术,劳义在后蹬过程中应尽量减小后蹬角角度,增加摆动腿折叠程度,提高摆动速度,以优化蹬摆技术。
[1] 运动生物力学编写组.运动生物力学[M].北京:高等教育出版社,2000.
[2] 杜娜娜,杜少武,詹晓梅,刘红.100m技术演进的多极化特征——以第29、30届奥运会100 m决赛运动员为分析案例[J].中国体育科技,2013(2):22-26.
[3] 姜勤佳,郭洋琴,王永,等.劳义与博尔特百米技术时空特征分析[J].体育科技文献通报,2012(5):53-55.
[4] 危常亮.2010年钻石联赛斯德哥尔摩站100m决赛博尔特技术特点分析[J].体育成人教育学刊,2011(6):69-71.
[5] 徐国营. 短跑运动员途中跑支撑期摆动腿作用的运动学相关分析[J]. 中国体育科技,2000(5) :8 -10.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-25
成都信息工程大学学报(2021年5期)2021-12-30
中学生百科·大语文(2021年4期)2021-05-12
西安邮电大学学报(2021年1期)2021-04-19
无线互联科技(2020年12期)2020-09-03
科学大观园(2019年10期)2019-09-10
中国体育教练员(2019年1期)2019-04-18
体育科技文献通报(2019年2期)2019-02-14
体育科技(2018年4期)2018-12-04
首都体育学院学报(2017年1期)2017-06-03
