机器人焊接复杂焊缝的仿真
2014-08-06 04:34:46彭灿灿李钰桢岳海瑞杨锦辉朱晓军薛家祥
电焊机 2014年4期
彭灿灿 ,李钰桢 ,岳海瑞 ,杨锦辉 ,朱晓军 ,薛家祥
(1.华南理工大学机械与汽车工程学院,广东 广州 510640;2.中国能源建设集团 广东火电工程总公司,广东 广州 510735)
0 前言
在工业高速发展的今天,为了提高焊接效率、改善焊接质量,焊接机器人获得了广泛的运用。复杂焊缝的焊接往往要求机器人有更高的自由度。但同时,自由度越高,对于机器人的控制就越难。对高自由度机器人实现精确控制的研究显得尤为有必要。本研究通过Pro/E建立了具有六自由度的焊接机器人的三维模型,运用MATLAB对机器人进行运动仿真控制,能够实现机器人按精确的指定焊接路线进行焊接,实现了对复杂焊缝焊接的需要[1-3]。
1 焊接机器人参数化建模
研究对象是PUMA系列焊接机器人,外形如图1所示。该系列机器人为六自由度机器人,可以到达允许空间范围内的任何区域。
Pro/E软件系统是美国参数化技术公司PTC的优秀产品,它提供了集成产品的三维模型设计、加工、分析及绘图等功能的完整的CAD/CAE/CAM解决方案。首先是运用Pro/E对机器人进行参数化建模。通过参数化建模,用户可以调用PTC公司的开放的功能函数,结合Visual Studio 2005进行二次开发,实现对模型参数的快捷调整。

图1 PUMA机器人
1.1 Pro/E中建立机器人的三维模型
根据PUMA机器人的实际尺寸,在Pro/E中建立各机器人各关节模型,并完成装配,图2为在Pro/E下装配好的机器人的三维模型。
图2 Pro/E下建立的机器人的三维模型
1.2 对机器人模型进行二次开发
设定机器人主要关节的可变参数,如图3所示。运用visual studio2005进行二次开发[4-5],在Pro/E菜单栏添加下拉菜单,并弹出MFC对话框,通过对话框命令对主要关节的参数进行改动,并显示机器人的空间工作范围,如图4所示。
Pro/E二次开发界面可以实现对机器人的导入、对机器人主要关节参数的改动、展示机器人的工作空间范围(见图5)以及在MATLAB中进行运动仿真控制。
2 D-H参数法建立机器人空间运动方程
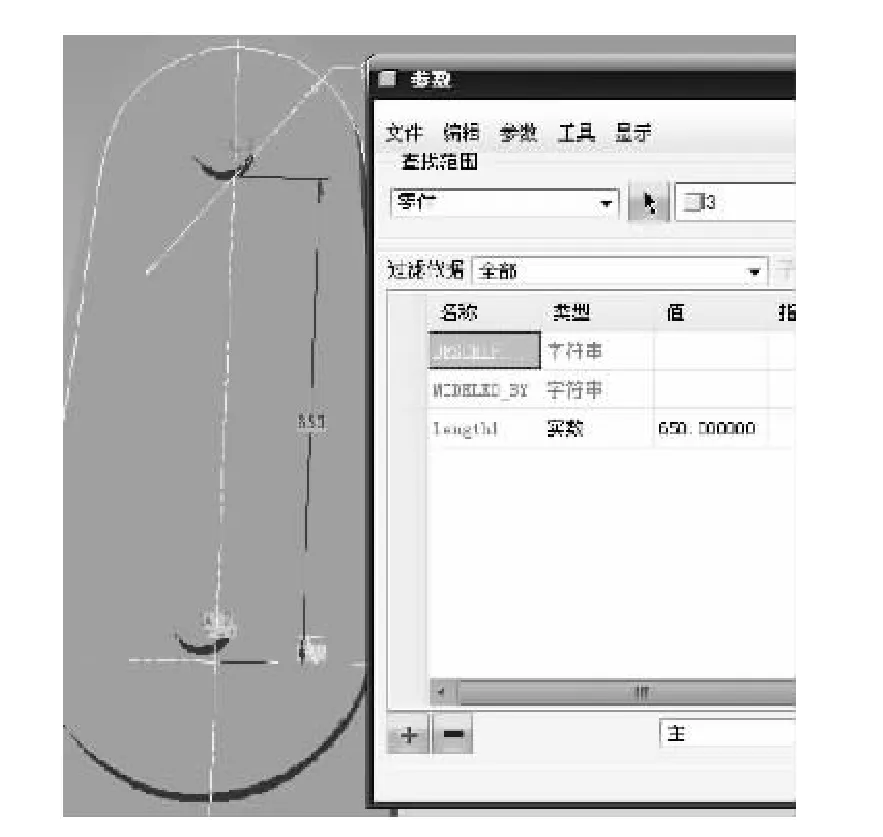
图3 机器人主要关节添加控制参数

图4 Pro/E二次开发的控制界面
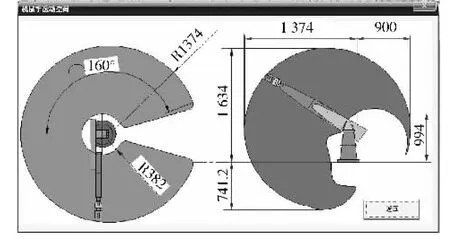
图5 机器人工作空间范围
机器人的运动是由各个关节角的转动控制的,通常情况下都是要求机器人按照一定的轨迹从一个位置运动到另一个位置。机器人通过控制各个关节角的度数来控制机器人手部的空间位置。对机器人的位姿描述通过D-H参数法来实现。空间坐标系如图6所示。

图6 机器人各关节空间坐标系
2.1 机器人关节参数分析
在构建的杆件坐标系基础上,按照D-H方法确定的连杆参数,见表1。机器人的偏置和连杆长度中除d4=600 mm,d3=190 mm,a2=650 mm外,其余均为零。其连杆扭角为:φ2=φ4=φ6=-90°,φ1=φ3=0,φ5=90°。需要说明的是:对于运动链两端,按照习惯约定:φ0=φ6=0;a0=a6=0。因为关节6是转动关节,因此规定H6=0为连杆6的零位,习惯约定d6=0。另外,参数的设定随坐标系设定的改变而改变。

表1 机器人关节参数
2.2 机器人运动学逆解
建立机器人空间运动学逆解,需要运用D-H参数法[6-7]对机器人空间位姿进行描述。建立空间坐标系

对机器人末端,也就是焊枪末端的位姿描述极为

式中 左边矩阵中各元素都是已知的,右边六个矩阵是未知的,与关节变量φ1~φ6有关。反变换法就是用未知矩阵的逆变换逐次左乘上述矩阵方程,以便将关节变量分离出来,从而解出关节变量。机器人相邻连杆间的坐标变换矩阵的逆矩阵表示为
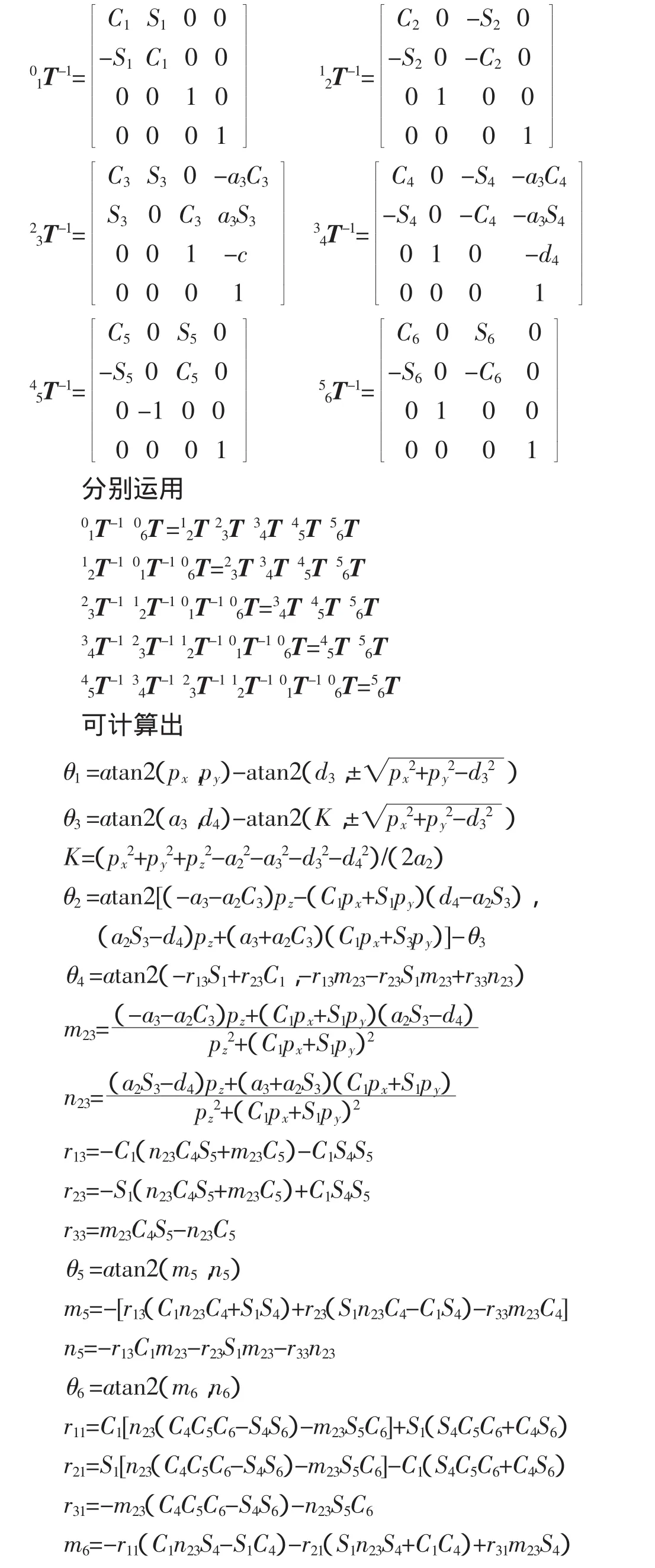

上式即为机器人空间运动逆解 φ1,φ2,φ3,φ4,φ5,φ6。
3 机器人运动仿真的实现
3.1 MATLAB中生成仿真控制界面
机器人控制部分在MATLAB中实现,本研究将在Pro/E中建立的机器人模型转换为由坐标点组成的矩阵,通过编写的函数将模型读进MATLAB中编写的GUI界面中,并通过求解的机器人运动学逆解结果驱动机器人实现仿真运动[8]。GUI界面效果如图7所示。

图7 GUI界面效果
3.2 仿真控制效果
运用MATLAB强大的数据处理能力,实现了实时地将焊枪末端位姿进行逆解,得到实时的φ1,φ2,φ3,φ4,φ5,φ6。通过这些关节夹角驱动机器人进行运动,实现焊枪末端按指定的轨迹送丝。焊枪末端在给定的轨迹下运动的效果如图8所示。
4 结论
运用Pro/E二次开发平台,搭建了焊接机器人的运动仿真平台。采用参数化建模,实现在不同机器人参数条件下对焊枪末端运动控制的的研究。同时,将Pro/E中建立的三维模型导入到MATLAB,充分运用MATLAB的数据运算处理能力,精确实现焊接机器人对复杂焊缝焊接的要求,用户通过输入焊缝空间轨迹,焊枪就能按照指定的焊接轨迹运行、送丝,界面具有良好的交互性。运用Pro/E对机器人进行参数化建模以及二次开发,运用D-H参数对机器人进行空间位姿描述,运用MATLAB进行机器人运动学逆解、建立MATLAB交互GUI界面,对研究使用焊接机器人焊接复杂焊缝的控制算法,实现对焊接机器人的精确、快捷控制有很好的借鉴意义。

图8 焊枪末端按给定轨迹运动效果
[1]杨叔子.工业机器人[M].武汉:华中科技大学出版社,2009.
[2]谭一炯,周方明,王江超,等.焊接机器人技术现状与发展趋势[J].电焊机,2006,36(3):6-10.
[3]张龙华.焊接机器人在现代工业生产中的应用[J].电焊机,2009,39(4):21-26.
[4]吴 焱.基于Pro/E二次开发平台的旋涡泵叶轮参数化模型设计[J].科技经济市场,2013(3):15-16.
[5]梅启元.Pro/E软件定制开发实现分析[J].电子机械工程,2013(1):60-64.
[6]李宪华,郭永存,张 军,等.模块化六自由度机械臂逆运动学解算与验证[J].农业机械学报,2013(4):246-251.
[7]孙学俭,王仙勇,董 宇.焊接机器人运动学正反解[J].北京石油化工学院学报,2011,19(1):30-34.
[8]Don Rile y,cad2matdemo.m.Matlab Central[OE/OP].http://www.mathworks.c n/matlabcentral/fileexchang e/3642-cad2matdemom,2003.
猜你喜欢
现代农机(2022年3期)2022-07-11 11:42:12
建材发展导向(2021年6期)2021-06-09 05:57:08
装备制造技术(2020年9期)2021-01-26 00:14:42
甘肃科技(2020年20期)2020-04-13 00:30:02
金属加工(热加工)(2020年12期)2020-02-06 05:59:00
模具制造(2019年3期)2019-06-06 02:11:02
制造技术与机床(2017年11期)2017-12-18 06:47:29
制造业自动化(2017年2期)2017-03-20 14:26:13
焊接(2016年6期)2016-02-27 13:04:57
制造技术与机床(2015年8期)2015-04-24 07:25:38