
一种对高层建筑振动半主动控制的新策略
2014-08-06 11:51马涌泉邱洪兴
中国石油大学学报(自然科学版) 2014年6期
马涌泉,邱洪兴
(东南大学土木工程学院,南京210096)
调谐质量阻尼器(TMD)对建筑结构的振动有一定的抑制效果[1-2],但TMD中的阻尼器不具备可调性,导致TMD仅能对某一特定频率起作用,严重降低了其工程应用价值。主动质量阻尼器(AMD)虽可在较宽的频域内工作,但存在能耗高、易溢出和稳定性差等不足,并且控制机构的驱动存在时滞,严重影响了其减振效果。不同的控制算法对控制系统的性能有较大影响[3]。目前关于控制理论的研究集中在线性二次型高斯(LQG)算法[4]和极点配置(PP)算法[5]。高层结构在强震作用下会进入非线性阶段,线性控制算法已不再适应,对此学者们提出了一些考虑结构非线性和荷载不确定性的交替控制算法(模糊逻辑控制[6]、自适应控制[7]和滑动模态控制[8])。传统的模糊逻辑控制器(FLC)很难确定隶属度函数和控制规则;遗传算法(GA)[9]和神经网络(NN)[10]虽被用于提高FLC的性能,但是当不同类型或不同水平的输入荷载出现时,GA的优化结果和NN训练便不再适用。滑动模态控制(SMC)能提供卓越的鲁棒性应对外界的不确定因素,此外通过Lyapunov稳定性理论[11]可以开展稳定性分析,这些都优于传统的FLC。笔者将ASMC与改进的限幅最优控制(MCO)相结合,提出适合TMMRD的ASMC/MCO半主动控制策略,运用此策略对一座30层钢框架结构进行振动控制数值分析,并将其计算结果与TMD、ASMC及LQG等控制策略的结果进行对比。
1 TMMRD的力学模型
TMMRD中采用的MRD用于控制系统的调节机构,可通过改变磁场强度调节其力学阻尼特性,抑制结构地震响应。该装置中的MRD采用并联的形式分别与质量块和主结构连接,其力学模型如图1(其中mt为质量块的质量,kt为弹簧提供的恢复刚度)所示。

图1 TMMRD的力学模型Fig.1 Mechanical model of TMMRD
MRD的力学模型采用ZapateiroM等[12]提出的S-Bouc-Wen模型,该模型能很好地模拟MRD在不同运动状态和外部电流下的输出阻尼力情况,其力学模型见图2,数学表达式为

式中,F为MRD的阻尼力;λ为Bouc-Wen模型的滞迟量;δ1为蓄能器的刚度,σ0为较高速度下获得的黏滞阻尼;σ1为低速环境下包含阻尼器的模型发生衰减而产生的阻尼系数试验值;δ0为较高速度下的控制刚度;x0为保证蓄能器的刚度为δ1且输出标识阻尼力时须产生的初始位移;α、γ、β、A和d均为MRD的性能参数。

图2 MRD的力学模型Fig.2 Mechanical model of MRD
由于黏滞阻尼系数随着命令电压v的不同而发生线性变化,则功能依靠性方程可表示为

MRD的磁流变液在达到流变平衡时涉及的动力学特性采用如下的一阶滤波器表述:

式中,u为一阶滤波器的输出;1/η为一阶滤波器的时间常数。
新型控制装置TMMRD的控制力向量由多个MRD的阻尼力向量组合值Fz与弹簧的弹性恢复力向量Fc组成,即

式中,xt为TMMRD与楼层的相对位移向量。
2 ASMC算法
单自由度非线性建筑结构在地震激励下的运动方程可表示为

式中,M为质量矩阵;为结构的加速度向量;C(x,)和K(x,)分别为阻尼力向量和刚度恢复力向量;r为影响系数矩阵;g(t)为地震加速度向量;U(t)为控制装置提供的控制力向量。
式(5)也可记为

定义e为测量输出X与期望输出Xd的差值,满足e=X-Xd=[e,]T。
滑动面可表示为

式中,k1>0,K=[k1,1]。
驱动轨迹进入滑动面的临界律可表示为

依据以上描述,分别导出两种类型的控制律。当S=0和=0时,迫使系统停留在滑动面上的等效控制律ueq可表示为

当S(X)≠0时,为了满足式(9)规定的滑动面条件,开关式控制规则usw必须被添加,此时SMC的控制律可表示为

其中,q(S)=g(t)+μΔsgn(S),且,μΔ≥μ>0。
用于描述多输入单输出(MISO)系统的模糊IFTHEN规则可表示为

式中,XF=[x1x2…xn]∈Rn和y∈R分别为FLC系统的输入和输出;和Bj分别为模糊集Rn和R的模糊标签;j为控制规则数。
模糊推理机执行从模糊集Rn到模糊集R的映射。当单个模糊化方法、产品推理及中心平均去模糊化被应用时,对应的模糊系统的输出为

式中,为语言变量xi的隶属度函数;yj为ξBj的最大值点;m为规则总数。
引入模糊基函数分量φj(XF),式(12)可表示为

其中,φ(XF)=[φ1(XF),…,φm(XF)]T和θ=[y1,…ym]T为模糊基函数向量,它属于递减的通用近似型向量。
在φj(XF)中的所有参数均可以在模糊基函数扩展程序的最开始阶段得到确定,剩余的设计参数仅有yj和θ,可以通过自适应律的推导得到。
当f(X)和g(t)未知时,通过式(11)获得控制律是困难的。一种合理的近似是采用模糊逻辑系统(XF)和(XQ)分别取代f(X)和q(S),其中XF和XQ均为FLC系统的输入向量。这种近似允许传统SMC中的不连续控制律usw发生衰减。
通过引入自适应技术可以大致获得模糊规则数据库,此时式(11)可变为

定义θf和θq分别为(XF)和(XQ)的可更新参数,通过在线调整这两个参数可以使得最小近似误差ω取最小值。
式(15)也可记为

ρ(XQ)也为模糊基函数向量,其分量的表达式与式(14)相同。
定义自适应模糊系统的优化参数如下:

式中,Ωf和Ωq分别为θf和θq的约束集。
定义最小近似误差ω为

根据通用近似理论[13]可知,自适应模糊系统中的ω为逼近0的非常小的值。
结合式(16)、(17)和(19),可得S在t时刻的一阶导数为
为探究控制器的稳定性,假设Lyapunov函数为

V在t时刻的一阶导数为

因此自适应律可表示为

式中,ξ1和ξ2均为正常量。
将式(23)和q(S)=g(t)+μΔsgn(S)代入式(22)可得

根据通用近似理论,Sω可以被忽略,进而。
以上推导基于单自由度系统,但是本文中提出的ASMC策略可以推广至高层结构这样安装有多个控制装置的多自由度系统,对此在ASMC策略中引入了分散控制理论[14]。该分散控制策略将控制系统划分为多个子系统,根据各子系统的速度和位移对各子系统进行分散控制。
3 半主动控制律设计
由于传统的限幅最优(CO)控制[15]的命令电压vi只能取0或Vmax,当受控系统的主导频率较低时,施加于结构的控制力发生电压差值较大的切换易放大结构的加速度反应。对此,提出了改进的限幅最优(MCO)半主动控制算法。该算法中的控制电压Vci可以在0~Vmax间任意调节,Vci可以通过外加电压与MRD最大出力间的线性关系确定。当依据ASMC策略算得的控制力理论值Fci大于MRD的最大出力Fmax时,则对MRD施加电压Vmax。MCO算法的示意图见图3。应用该算法施加于第i个MRD的命令电压vi可表示为

式中,H(·)为 Heaviside阶跃函数;Fi为测得的MRD控制力(输出阻尼力);ζi为与控制力相关的电压系数;Vmax为施加到电流驱动器的电压,且该驱动器与MRD的磁流变效应饱和度相对应。

图3 MCO算法的示意图Fig.3 Schematic diagram of MCO algorithm
4 数值分析
选取一座30层钢框架结构(简称结构)为研究对象,抗震设防烈度为8度,各楼层的质量mj和刚度kj的取值见表1。层高均为3.0 m。TMMRD的质量块质量mt=8.635×104kg,弹簧提供的恢复刚度kt=9.556 MN·m-1。对于MRD,其铭牌标定的最大出力max和最大冲程L分别为1.2 MN和±45 cm,电压系数ζi=1.12。主动控制装置采用压电陶瓷驱动器(PCA),其max和L的取值与MRD的相同。
通过对S-Bouc-Wen模型进行性能试验,得到MRD的14个最优化参数,即:αa=145 N·cm-1,αb=650 N·cm-1·V-1,γ=β=370 cm-2,A=300,d=2,η=198 s-1,c0a=20.15 N·s·cm-1,c0b=3.50 N·s·cm-1·V-1,δ0=46.8N·cm-1,c1a=291N·s·cm-1,c1b=2.96 N·s·cm-1·V-1,δ1=4.95 N·cm-1,x0=14.80 cm。

表1 结构的计算参数Table 1 Calculation parameters of structure
将MRD两端的相对位移和相对速度作为ASMC的输入,结构模型采用 S-function/MATLAB程序编写。构建的应用于MRD的ASMC/MCO半主动控制算法的 SIMULINK流程见图4。运用ASMC主动控制策略抑制结构振动的流程见图5。

图4 应用于MRD的ASMC/MCO控制算法框图Fig.4 Block diagram of ASMC/MCO control algorithm for MRD

图5 采用ASMC控制器抑制高层结构振动的流程Fig.5 Process of ASMC controller used for reducing vibration of high-rise structure
采用两个输入变量(相对位移x和速度)和一个输出变量设计模糊逻辑系统(XF),每个变量有7个隶属度函数,选择的输入和输出变量的归一化隶属度函数呈现三角形,如图6所示。采用两个输入变量(滑动表面S=k1x+和它的一阶导数)和一个输出变量设计另一个模糊逻辑系统(XQ),每个变量有5个隶属度函数,选择的输入和输出变量的归一化隶属度函数见图6。XF)和(XQ)分别由49个和25个控制规则构成。控制器的参数为:k1=16,ε1=ε2=120;输入变量域为:x=[-0.16,0.16],=[-1.6,1.6],S=[-5,5],=[-20,20];输出变量域为:(XF)=[-10×105,10×105],(XQ)=[-1.9×105,1.9×105]。控制器中θf和θq的初始值分别为49×1和25×1向量。(XF)和(XQ)的初始模糊控制规则分别见表2、3。
TMMRD在高层结构的布置位置如图7所示。选取 El Centro、Golden Gate Park、Ninghe-Tianjin 和Kobe波等4条强震加速度记录为地震激励。按照规范[16]要求将4条地震波的峰值加速度统一调至0.25g。对比分析结构在无控制、TMD被动控制、ASMC/MCO半主动控制、ASMC主动控制和LQG主动控制下的评价指标值。采用的评价指标为J1~J15。表4为无控制(原结构)、TMD控制、ASMC/MCO控制、ASMC控制和LQG控制下的各指标对比。
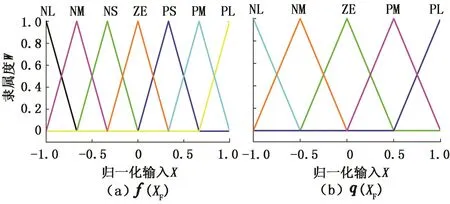
图6 XF)和(XQ)的隶属度函数Fig.6 Membership functions of(XF)and(XQ)
表2 XF)的初始模糊控制规则Table 2 Initial fuzzy control rules ofXF)

表2 XF)的初始模糊控制规则Table 2 Initial fuzzy control rules ofXF)
x/˙x NL NM NS ZE PS PM PL NL PL PL PM PM PM PS PS NM PL PL PM PM PS PS ZE NS PL PM PS ZE NS NS NS ZE PM PM PS ZE NS NM NM PS PM PS PS ZE NS NM NM PM ZE NS NS NM NM NM NM PL NS NS NM NM NM NL NL
表3 (XQ)的初始模糊控制规则Table 3 Initial fuzzy control rules of(XQ)

表3 (XQ)的初始模糊控制规则Table 3 Initial fuzzy control rules of(XQ)
S/˙S NL NM ZE PM PL NL PL PL PM PM ZE NM PL PM PM ZE ZE ZE PM PM ZE NM NM PM ZE ZE NM NL NL PL ZE NM NM NL NL

图7 TMMRD在高层结构的布置位置Fig.7 Layout location of TMMRD in high-rise structure
表4中的最大值和平均值分别定义为

由表4可以看出,无控制与TMD控制结构的弹塑性层间位移角峰值J1和弹塑性层间位移角均方根J2均超出了钢框架结构的弹性层间位移角限值(1/550),结构进入了塑性变形阶段。对于J2的平均值,ASMC/MCO的控制效果分别比TMD和LQG的控制效果提升了39.1%和14.3%,ASMC/MCO和ASMC的控制效果非常接近;ASMC/MCO对结构的水平向加速度峰值J3、水平向加速度均方根J4和基底剪力峰值J5等指标的控制效果也要比TMD和LQG的显著。对于J5的最大值,ASMC/MCO的控制效果分别比TMD和LQG的控制效果提升了49.5%和17.6%,ASMC/MCO和ASMC的控制效果非常接近,前者仅比后者小0.1%。可见本文中提出的ASMC/MCO半主动控制器和ASMC主动控制器在抑制结构地震响应方面的性能均比TMD与LQG优越,并且ASMC/MCO的控制效果逼近ASMC主动控制。

表4 无控制与有控制结构的评价指标对比Table 4 Evaluation criteria comparison between uncontrolled structure and various controlled structures
TMD被动控制、ASMC/MCO半主动控制、ASMC主动控制和LQG主动控制下的结构曲率延性系数峰值(J6)、曲率延性系数均方根(J7)、构件耗能量(J8)和塑性铰个数(J9)等结构损伤类指标比无控制结构的均要有所降低。其中ASMC/MCO与ASMC控制下各损伤指标的降幅最明显,且J9为零。对于J7的平均值,ASMC/MCO、ASMC的降幅分别比TMD和LQG的降幅减小了46.3%、46.4%和19.2%、19.3%。可见ASMC/MCO和ASMC控制下的结构进入塑性(延性)阶段的程度较小,结构基本保持在弹性阶段,因此结构的塑性(延性)耗能量较小。
ASMC/MCO和ASMC的控制力峰值(J10)均接近足尺MRD和PCA铭牌标定的输出阻尼力峰值(1200 kN),而LQG的J10离PCA的出力峰值还有较大差距。ASMC/MCO和ASMC控制下的控制装置冲程(J11)均接近MRD和PCA的最大冲程(±45 cm),而LQG的J11离PCA的冲程峰值还有较大差距。可见本文中提出的ASMC/MCO半主动控制器和ASMC主动控制器的性能均要比LQG的优越,前两者比后者更利于控制装置性能的充分发挥。同时,ASMC/MCO半主动控制器的性能也非常接近ASMC主动控制器。
ASMC/MCO策略需要外界供给的能量(J12)比ASMC策略和LQG策略的要小很多。ASMC策略比LQG策略需要的外界能量要少,可见ASMC策略要比LQG策略节能。ASMC/MCO、ASMC和LQG三种策略所需的控制装置数目(J13)相同,但 ASMC/MCO和ASMC所需的传感器数目(J14)比LQG的要多,尤其是ASMC/MCO所需的J14最多。这是因为ASMC/MCO和ASMC都采用了分散控制理论,故所需的J14比LQG的要多;又由于ASMC/MCO需要对依据ASMC算得的最优控制力向量施以改进的CO半主动控制律,故前者所需的J14比后者要多。在结构振动控制过程中,ASMC/MCO和ASMC所需的计算资源量(J15)皆为零,而LQG却需要较多的计算资源,故前两种策略可避免由控制器运算造成的时滞。
图8为El Centro波激励下无控制和有控制结构的顶层层间位移和加速度时程。ASMC/MCO和ASMC对层间位移的控制效果比TMD和LQG的都要显著,ASMC/MCO的控制效果分别比TMD和LQG的提升了35.2%和8.6%。
图9为Golden Gate Park波激励下无控制和有控制结构的弹塑性层间位移角和各楼层底部剪力峰值对比(弹塑性层间位移角限值θ=1/550 rad)。从图9中可以看出,ASMC/MCO和ASMC的控制效果比TMD和LQG的都要显著。对于结构剪力峰值(各楼层底部剪力峰值的最大值),ASMC/MCO的控制效果分别比TMD和LQG的提升了49.8%和17.5%。

图9 无控制和有控制结构的地震响应峰值对比Fig.9 Peak seismic responses comparison between uncontrolled structure and various controlled structures
图10为El Centro波作用下的ASMC/MCO和ASMC策略的输出控制力对比时程。从图10中可看出,两者的控制力时程曲线很吻合,且两者的控制力曲线非常光滑,未出现抖振现象,可见ASMC控制器的性能明显优于传统的SMC控制器。
通过对比ASMC控制结构和LQG控制结构的初始刚度在发生±30%变化时的各评价指标平均值来对比ASMC和LQG的鲁棒性。两种控制策略下的各指标平均值见表5。由表5可以看出,ASMC控制的各评价指标平均值都明显小于相应的LQG控制的各指标平均值。可见在结构刚度存在不确定性时,ASMC控制器的性能要明显优于LQG,故ASMC控制器的鲁棒性要明显优于LQG控制器。

图10 控制力时程Fig.10 Time history of control force

表5 ±30%刚度扰动下的各评价指标平均值Table 5 Average values of various evaluation criteria due to±30%stiffness perturbed
5 结 论
(1)新提出的ASMC/MCO和ASMC控制策略对结构地震响应的控制效果均要明显优于TMD被动控制和 LQG主动控制;采用 ASMC/MCO和ASMC控制的结构均比TMD和LQG控制的结构进入塑性(延性)阶段的程度小得多;ASMC和ASMC/MCO策略的控制装置实际出力最大值和冲程最大值均比LQG策略的大得多。
(2)提出的ASMC/MCO和ASMC控制策略无需任何计算资源,可有效地降低控制器运算产生的时滞;ASMC/MCO半主动控制器的控制效果逼近ASMC主动控制器,两者的控制力时程曲线光滑且几乎完全吻合,并无任何抖振现象发生,两者的性能要优于传统的SMC策略;ASMC控制器的鲁棒性要明显优于LQG控制器。
[1] MAJCHER K,WOJCICKI Z.Parametric vibration of TMD installed in tall building during seismic excitation[J].Proceedings in Applied Mathematics and Mechanics,2010,10(1):189-190.
[2] ANGELIS M D,PERNO S,REGGIO A.Dynamic response and optimal design of structures with large mass ratio TMD[J].Earthquake Engineering and Structural Dynamics,2011,40(3):257-271.
[3] CHA Y J,ZHANG J,AGRAWAL A K,et al.Comparative studies of semi-active control strategies for MR dampers:pure simulation and real-time hybrid tests[J].Journal of Structural Engineering,2013,139(7):1237-1248.
[4] XU Y L,ZHANG W S.Closed-form solution for seismic response of adjacent buildings with linear quadratic qaussian controllers[J].Earthquake Engineering and Structural Dynamics,2002,31(2):235-259.
[5] CASCIATI F,RODELLAR J,YILDIRIM U.Active and semi-active control of structures-theory and applications:a review of recent advances[J].Journal of Intelligent Material Systems and Structures,2012,23(11):1181-1195.
[6] GUCLU R,YAZICI H.Fuzzy logic control of a non-linear structural system against earthquake induced vibration[J].Journal of Vibration and Control,2007,13(11):1535-1551.
[7] BITARAF M,HURLEBAUS S,BARROSO L R.Active and semi-active adaptive control for undamaged and damaged building structures under seismic load[J].Computer-Aided Civil and Infrastructure Engineering,2012,27(1):48-64.
[8] MOON S J,BERGMAN L A,VOULGARIS P G.Sliding mode control of cable-stayed bridge subjected to seismic excitation[J].Journal of Engineering Mechanics,2002,129(1):71-78.
[9] WONGPRASERT N,SYMANS M D.Application of a genetic algorithm for optimal damper distribution within the nonlinear seismic benchmark building[J].Journal of Engineering Mechanics,2004,130(4):401-406.
[10] YEH K,CHEN C W,LO D C,et al.Neural-network fuzzy control for chaotic tuned mass damper systems with time delays[J].Journal of Vibration and Control,2012,18(6):785-795.
[11] POLYAKOV A,POZNYAK A.Lyapunov function design for finite-time convergence analysis:"twisting"controller for second-order sliding mode realization[J].Automatica,2009,45(2):444-448.
[12] ZAPATEIRO M,KARIMI H R,LUO N,et al.Realtime hybrid testing of semiactive control strategies for vibration reduction in a structure with MR damper[J].Structural Control and Health Monitoring,2010,17(4):427-451.
[13] ARTEAGA C,MARRERO I.Universal approximation by radial basis function networks of Delsarte translates[J].Neural Networks,2013,46(10):299-305.
[14] LEI Y,WU D T,LIU L J.A decentralized structural control algorithm with application to the benchmark control problem for seismically excited buildings[J].Structural Control and Health Monitoring,2013,20(9):1211-1225.
[15] YOSHIDA O,DYKE S J.Response control of full-scale irregular buildings using magnetorheological dampers[J].Journal of Structural Engineering,2005,131(5):734-742.
[16] GB 50011-2010建筑抗震设计规范[S].北京:中国建筑工业出版社,2010.
猜你喜欢
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
装备制造技术(2020年11期)2021-01-26
家庭影院技术(2020年6期)2020-07-27
铁道通信信号(2019年1期)2019-03-21
大经贸(2017年11期)2018-01-08
科学与财富(2017年12期)2017-05-16
商场现代化(2016年12期)2016-06-06
企业导报(2016年10期)2016-06-04
科教导刊·电子版(2016年11期)2016-06-03
汽车工程学报(2015年6期)2016-03-23
