矿山一体化空间信息测量仪的研制
2014-08-02 03:57余乐文张元生陆得盛
金属矿山 2014年5期
余乐文 张元生 陆得盛 张 宣
(北京矿冶研究总院,北京 100260)
矿山一体化空间信息测量仪的研制
余乐文 张元生 陆得盛 张 宣
(北京矿冶研究总院,北京 100260)
针对目前矿山空间信息测量仪器存在操作复杂、测量效率低、便携性差、集成化程度低等问题,研制了一种操作简单、高效、手持式的一体化空间信息测量装置,该装置根据相位法计算测量距离,结合倾角和方位角计算空间点的三维坐标。开发了测量仪的硬件系统,具备自主供电、数据测量与本地化储存、无线通讯等功能,实现手持测量空间三维形态;开发了系统测量软件平台,实现通讯接口及测量参数配置、实时测量坐标显示、空间对象实体建模及三维形态展示、模型分析与评估等功能。在矿山井下进行试验,测量仪可快速测量未知区域空间点的三维坐标,测量距离最远达83 m,测量误差小于1 cm,具有操作简单、高效、便携等特点,试验结果证明系统的有效性和可靠性,满足矿山空间信息一体化测量需求。
矿山测量 三维坐标 三维重建
目前,在矿山空间信息测量技术中常见的测量手段主要包括经纬仪、水准仪、全站仪、GPS、三维激光扫描仪,但上述技术在实际应用过程中存在一定的问题,如:测量过程复杂、工作效率低、系统的集成化作业程度不高等,难以满足矿山的复杂应用需求[1-3]。针对目前矿山测量过程中存在的问题,研制出一种手持式空间信息测量仪,可快速测量空间点三维坐标,提高测量工作效率。
1 测量方法
一体化空间信息测量仪采用相位激光测量原理,通过测量回波信号相位与发射信号相位差来计算测量距离[4-5]。使用测量仪时,首先应先将测量仪对准已知点,测量到已知点的距离、方位角和倾角,计算出测量仪自身的坐标;然后,以测量仪坐标为基点,获取基点到被测点的距离和角度值,通过计算获得被测点的坐标值,见图1,其三维坐标计算原理见图2。
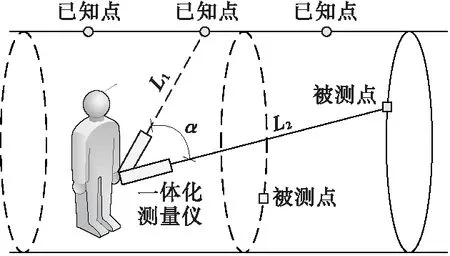
图1 测量方法原理Fig.1 Principle of the measurement method
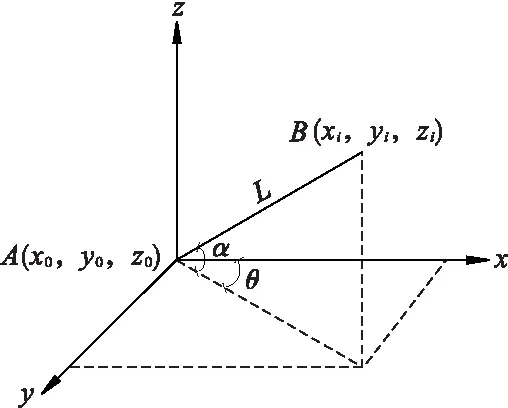
图2 计算原理Fig.2 Principle of calculation
已知坐标系内一点A(x0,y0,z0),坐标系内的任一点B(xi,yi,zi),传感器测得B点对于A点的倾角α
和方位角θ,由此可得到任意B点坐标的计算公式为
式中,L为A、B两点之间的距离,m;α为B点对于A点的倾角,(°);θ为B点对于A点的方位角,(°)。距离L计算方程[6-7]为
式中,L为待测距离,m;λ为波长,m;φ为相位差,rad。
2 仪器研制
2.1 系统组成
一体化空间信息测量仪主要包括硬件系统及软件平台两部分。硬件系统由传感器、微控制器、电池、通讯电缆、PDA组成;测量软件平台由通讯接口及测量参数配置、实时测量坐标显示、空间对象实体建模及三维形态展示、模型分析与评估等功能模块组成,见图3。
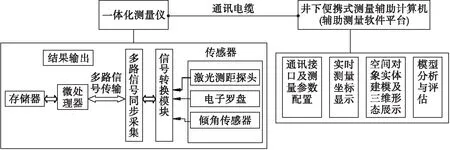
图3 系统结构Fig.3 Structure of the system
2.2 硬件设计
一体化测量仪通过相位式激光测距传感器获取距离值,采用高精度电子罗盘和倾角传感器获取方位角与倾角,通过微控制器完成集成和运算,实时显示测量点三维坐标,并实现本地化储存,或通过有线或无线方式与PDA进行数据交互;电池实现测量仪的本地化供电。
2.3 软件设计
软件平台由上位机和下位机组成。下位机软件实现信号采集、数据处理、数据存储、数据查看与传输等功能,具体功能包括:①参数设置,包括当地磁偏角和已知点空间坐标值;②距离和角度测量,同步采集距离和角度信息并保存,供坐标解算使用;③坐标解算,根据算法和参数解算仪器或被测点坐标值;④数据保存,保存解算的坐标值;⑤数据传输,通过有线和无线方式传输测量结果至上位机。
上位机实现点云实时展示、三维建模、模型分析与评估等功能[8-11],具体功能包括:①点云实时展示,通过实时通信获取测点坐标数据并在三维坐标系中实时展示;②三维建模,通过对测量的三维点云坐标进行实体建模;③模型分析与评估,实现三维模型体积计算、边界提取、剖面分析等。
3 试 验
矿山一体化空间信息测量仪在承德铜兴矿业有限公司下一中段39线附近巷道测试,该区域湿度大、粉尘大,环境恶劣,具有代表性。
3.1 性能测试
将一体化测量仪固定在三脚架上,利用单点连续测量方式测试仪器测距性能,将最远测量的数据通过曲线表示,见图4。
由于智能全站仪测距精度高,误差小于1 mm,因此以智能全站仪测量的数据为基准,测试一体化测量仪的测距精度。在同一测量点,将测量仪测量的数据与智能全站仪测量数据对比,见图5。
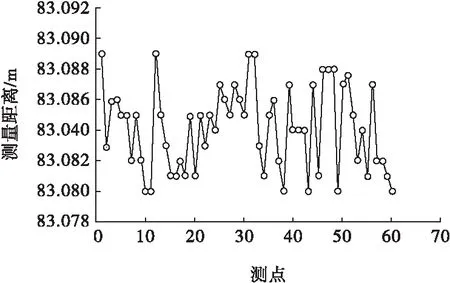
图4 量程测试结果Fig.4 Range test results

图5 精度测试结果Fig.5 Accuracy test results
经过测试,测量仪在井下环境下最远测量距离达83 m,测量误差小于1 cm。
3.2 测量试验
测量仪通过测量自身到已知控制点的距离、倾角和方位角来计算自身坐标,然后测量巷道中任意点三维坐标,采集的点云数据实时显示在软件中,对数据进行三维建模,见图6。
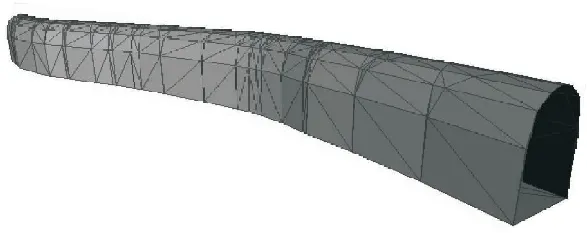
图6 巷道三维模型Fig.6 Three-dimensional model of underground roadway
巷道测量过程操作简单,数据显示、处理简洁,巷道测量耗时65 s。试验证明,矿山一体化空间信息测量仪可快速、精确实现巷道空间三维形态测量。
4 结 论
研制出一种矿山一体化空间信息测量仪,其特点为体积小、质量轻,简单便携;测量仪可在矿山恶劣环境下使用,测距能力达83 m,精度达1 cm,满足矿山测量需求;测量仪操作简单,可快速测量巷道三维形态,提高测量工作效率和安全性;测量仪还可应用到矿山开采过程中炮孔的高精度定位,为潜孔钻机的钻孔定位提供数据支撑。
[1] Calkins J M. Quantifying Coordinate Uncertainty Fields in Coupled Spatial Measurement Systems[D]. Virginia:Virginia Polytechnic Institute,2002.
[2] Domenico A M,Jafar J,Fiorenzo F,et al. Indoor GPS:System functionality and initial performance evaluation[J]. International Journal of Manufacturing Research,2008,3(3):335-343.
[3] 余乐文,张 达,余 斌,等. 矿用三维激光扫描测量系统的研制[J]. 金属矿山,2012(10):101-103. Yu Lewen,Zhang Da,Yu Bin,et al. Research of 3d laser scanning measurement System for mining[J]. Metal Mine,2012(10):101-103.
[4] 汪 涛. 相位激光测距技术的研究[J]. 激光与红外,2007,37 (1):29-31. Wang Tao. Research of the phase laser ranging technology[J]. Laser & Infrared,2007,37(1):29-31.
[5] Zhang Yucun,Liu Haibin. A detection method of laser doppler signal based on topological contra variance[J]. Optoelectron Lett,2009,5(4):295-298.
[6] 黄 震,刘 彬. 脉冲激光测距中时间间隔测量的新方法[J]. 光电子·激光,2006,17 (9):1153-1155. Huang Zhen,Liu Bin. New method to measure the time-of-flight in pulse laser ranging[J]. Journal of Optoelectronics·Laser,2006,17(9):1153-1155.
[7] 黄军芬,黄民双,孙亚玲,等. 基于伪非均匀采样的高精度时间间隔测量方法[J]. 光电子·激光,2012,23 (10):1945-1948. Huang Junfen,Huang Minshuang,Sun Yaling,et al. High precision time-interval measurement method based on pseudonanuniform sampling[J] Journal of Optoelectronics·Laser,2012,23(10):1945-1948.
[8] Fiorenzo F,Maurizio G,Domenico M,et al. On-line diagnostics in the mobile spatial coordinate measuring system[J]. Precision Engineering,2009,33(4):408-417.
[9] 盖志刚,赵 杰,杨 立,等. 一种新型激光智能水位测量系统的研制[J]. 光电子·激光,2013,24(3):569-572. Gai Zhigang,Zhao Jie,Yang Li,et al. Development of new laser intelligent water level measuring system[J]. Journal of Optoelectronics·Laser,2013,24(3):569-572.
[10] Wu Yonghua,Hu Yihua,Xu Shilong,et al. Design of airport wake vortex monitoring system based on 1.5 μm pulsed coherent doppler lidar[J]. Optoelectron·Lett,2011,7(4):298-303.
[11] 张元生. 面向地下矿山的多尺度建模技术[J]. 有色金属:矿山部分,2012,64 (1):1-4. Zhang Yuansheng. Multi-scale modeling technology for underground mines[J].Nonferrous Metals:Mining Section,2012,64(1):1-4.
(责任编辑 邓永前)
Research on the Measurement Instrument of Mine Spatial Information Integration
Yu Lewen Zhang Yuansheng Lu Desheng Zhang Xuan
(BeijingGeneralResearchInstituteofMiningandMetallurgy,Beijing100260,China)
In view of the current situation of measurement system for mine spatial information,such as complicated operation,low efficiency,poor portability,poor integration,a new simple,efficient,hand-held measurement instrument of mine spatial information integration was developed.The instrument can calculate the distance by adopting the phase method and acquire the three-dimensional coordinate data by combining with the dip and the azimuth. The hardware system of the instrument was developed,with the functions of independent power supply,storage of measurement data,wireless communications and others so as to realize the three-dimensional handheld measurement. The measurement software of the instrument was improved,with the functions of communication interface and measured parameters configuration,real-time display of the survey coordinate,entity modeling and three-dimensional display of the space objects,and analysis and evaluation of the models. When tested in underground mine,the measurement instrument can quickly obtain three-dimensional coordinates of the unknown underground areas and realize the maximum measuring range of the instrument at 83 m and maximum measuring error of the instrument at 1cm with the characteristics of simplicity,high efficiency and portability. Its effectiveness and reliability can meet the requirements of the measurement of mine spatial information integration.
Mine surveying,Three-dimensional coordinate,Three-dimensional reconstruction
2014-01-02
国家高技术研究发展计划(863计划)项目(编号:2011AA060405),国家国际科技合作专项(编号:2011DFA71990),“十二五”国家科技支撑计划项目(编号:2012BAB01B04,2012BAK09B03)。
余乐文(1984—),男,硕士研究生,工程师。
TD178
A
1001-1250(2014)-05-118-03
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
建材发展导向(2021年13期)2021-07-28
北京汽车(2021年3期)2021-07-17
电子制作(2019年9期)2019-05-30
中学生数理化·中考版(2018年11期)2019-01-31
电子制作(2017年7期)2017-06-05
地理空间信息(2017年2期)2017-03-06
河南科技(2014年23期)2014-02-27