
基于第一扇区坐标分量的SVPWM快速算法
2014-08-02 10:30:36董兴发
化工自动化及仪表 2014年1期
荣 飞 董兴发
(1.山西同煤集团煤峪口矿,山西 大同 037000; 2.太原理工大学机械工程学院,太原 030000)
空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)技术是一种比SPWM技术更为先进的、计算机可高度介入的脉冲宽度调制(Pulse Width Modulation,PWM)方法。它具有谐波含量少、开关损耗小和直流电压利用率高的优点,且磁链轨迹更逼近圆形,转矩平稳,因此得到了日益广泛的应用[1]。传统的SVPWM算法涉及到大量的运算,主要是三角函数运算和矩阵运算,这大大增加了控制器的负担和程序占用的存储空间[2]。
笔者提出了一种新型的SVPWM快速算法,该算法能根据参考矢量的坐标分量迅速判断出参考矢量所在的扇区,且仅需根据坐标分量计算出第一扇区的时间,即可求出其他相关矢量的作用时间,易于数字化应用,具有很好的实用性。
1 SVPWM快速算法①
1.1 扇区判断
两电平在三坐标轴坐标系空间中的矢量图如图1所示,图中的扇区号经过了顺序调整,该操作的仿真模块如图2所示。

图1 两电平三坐标轴坐标系中的矢量图
Ux,Uy,Uz——参考矢量在坐标系的分量;
V1~V6——两电平空间矢量图的基本向量;
Vref——参考矢量

图2 扇区调整仿真模块
如图1所示,在两电平电压空间矢量图中建立一个与所有扇区严格坐标系,其中3个坐标轴x,y,z分别位于扇区Ⅰ,Ⅱ,Ⅲ的角平分线上。设参考矢量在坐标系的分量分别为Ux,Uy,Uz[3],即:
(1)
若Uz>0,则扇区可能为Ⅱ,Ⅲ,Ⅳ;Uy<0,则扇区可能为Ⅳ,Ⅴ,Ⅵ,因此若Uz>0且Uy<0,则参考矢量所在的扇区为Ⅳ,于是得出参考矢量所在扇区的判断关系见表1[4]。

表1 扇区判断关系表
1.2 相关矢量作用时间计算
相关矢量作用时间的计算依据的是矢量的平行四边形定则,因此若合成两个不同参考矢量的平行四边形是全等的,则它们的相关矢量作用时间要么相同要么顺序相反。
如图3所示,若参考矢量Vref在第二扇区与第一扇区内的模长相等,且第二扇区的参考矢量经角度变换转化到第一扇区后,与α轴正向的夹角与第一扇区的参考矢量和与α轴正向夹角相等。则这两个平行四边形是全等的。图3中,T11、T12、T21、T22为与参考矢量相关的基本矢量的作用时间,于是得T11=T22,T12=T21。当参考矢量位于第三扇区时,同理可得其作用时间与第一扇区作用时间的对应关系为T31=T11,T32=T12。这样就可以用第一扇区的时间来代替其他扇区的时间。

图3 扇区Ⅱ,Ⅰ作用时间关系
设Vref位于第一扇区,由传统的SVPWM算法可得矢量的作用时间为[5]:
(2)
与式(1)相比较得:
(3)
得到的各扇区的矢量作用时间见表2。

表2 各扇区矢量作用时间
于是将参考矢量旋转到第一扇区后,就可以用式(3)来求所有扇区相关矢量的作用时间了,参考矢量转化公式为:
theta=θ-π(N-1)/3
(4)
式中N——扇区数;
θ——参考矢量与α轴正方向的夹角[6]。
2 仿真验证
在Simulink中建立了该算法和传统算法的仿真模型。直流电压设为600V,仿真时间为0.7s,异步电动机参数设置为:额定功率4kW,线电压有效值400V,频率50Hz,二对极RS=1.405Ω,LS=0.005 839H,Rr=1.395Ω,Lr=0.005 839H,Lm=0.172 2H,转动惯量为0.013 1kg·m2,机械负载转矩为30N·m。图4、5分别为逆变器在该算法下输出的相电压波形图和线电压波形图(横轴单位为s,纵轴单位为V),由输出波形可知该算法是正确的。图6为电机转矩曲线,图7为电机转速曲线,由电机输出的曲线可知,该算法有较好的稳定性。

图4 相电压波形
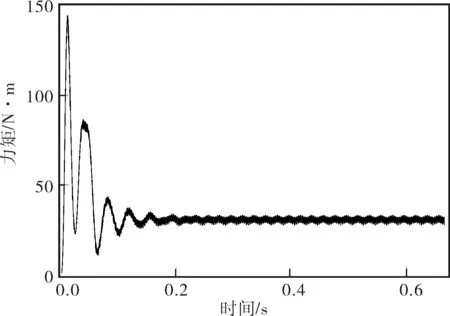
图6 电机转矩曲线
3 结束语
笔者提出了一种基于第一扇区坐标分量的SVPWM算法,简化了扇区判断及相关矢量作用时间的计算量,提高了系统的实时性,系统达到稳态后,运行平稳,且该方法具有很好的实用性。

图7 电机转速曲线
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
长江大学学报(自科版)(2022年1期)2022-02-25 03:24:24
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
教育教学论坛(2017年34期)2017-08-30 10:32:04
西南交通大学学报(2016年4期)2016-06-15 20:29:36
电测与仪表(2016年22期)2016-04-12 00:19:58
计算机技术与发展(2016年10期)2016-02-27 00:44:08
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
电测与仪表(2014年7期)2014-04-04 12:09:32
