
基于改进人工势场法的AUV路径规划
2014-08-02 09:51吴正平陈永亮喻高明
化工自动化及仪表 2014年12期
吴正平 唐 念 陈永亮 喻高明 俞 辉
(1.三峡大学 a.电气与新能源学院;b.理学院,湖北 宜昌 443002;2.长江大学石油工程学院,武汉 430100)
路径规划是自主式水下航行器(AUV)研究的重要课题,路径规划技术是决定AUV智能水平的关键技术。AUV路径规划指:AUV在有障碍物的环境中,寻找一条从起点到目标点的安全无碰路径,并要求时间尽可能最短。路径规划方法有很多种,常见的有栅格法、可视图法、遗传算法、蚁群算法、人工势场法及流函数法等[1]。笔者提出一种基于改进人工势场法的AUV路径规划方法。
1 人工势场法的基本原理①
人工势场法的基本原理为:把AUV当作质点,假设AUV在一个存在复合势场的环境中运行,在此环境中障碍物周围有斥力场,目标点处有引力场[2]。建立关于距离的势函数,AUV所受的力即虚拟的势场力。虚拟的势场力就是势的负梯度[2]。AUV在虚拟的势场力的作用下,从起点绕过障碍物运动到目标点。
1.1 势函数
设复合势场为U(R),目标点引力场为Ua(R),障碍物的斥力场为Ur(R),则有U(R)=Ua(R)+Ur(R)。引力和斥力分别为引力场和斥力场的负梯度,故引力和斥力分别为Fa(R)=-grad[Ua(R)]、Fr(R)=-grad[Ur(R)],则AUV所受的作用力为F(R)=Fa(R)+Fr(R)。将AUV看作质点,假设其在一个二维位姿空间内运动[2],AUV的位置表示为R=[x,y]T。建立关于距离的势函数,则引力势函数为:
(1)
其中k为引力势场因子,k>0;R为AUV的位置向量;Rg为目标位置;ρ(R,Rg)为AUV和目标点之间的距离,ρ(R,Rg)=‖Rg-R‖;ρ2表示目标点对AUV的引力势场是一条抛物线。
障碍物对AUV的斥力势函数为:
(2)
其中η为斥力势场因子,η>0;ρ(R,Rg)为AUV与障碍物的最小距离;ρ0为单个障碍物的影响距离,ρ0>0,当AUV与障碍物的距离大于ρ0时斥力势场对AUV的运动不再有影响。
总的势场U的计算式为:
(3)
1.2 AUV受力分析
人工势场法AUV受力分析如图1所示。
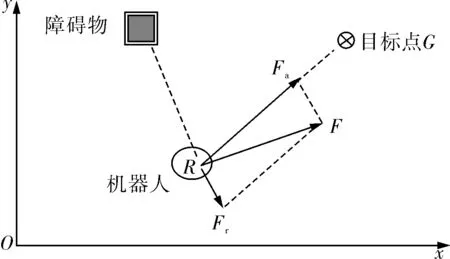
图1 人工势场法AUV受力分析
目标位置对AUV的吸引力为:
Fa(R)=-▽Ua(R)=k(Rg-R)
(4)
障碍物对AUV的斥力为:

(5)
故AUV受的总合力为:
(6)
1.3 人工势场法的缺点
人工势场法算法简单,但存在以下缺点[2]:
a. 局部极小值问题。当AUV所处的位姿环境比较复杂,障碍物数目较多时或者进入“死胡同”(例如U形障碍物)时,就容易陷入局部极小。
b. 在相隔很近的障碍物之间发现不了路径。当AUV运动到靠近两障碍物中间,并且此时AUV所受的引力约等于AUV所受的斥力时,AUV的速度为0,AUV就会停滞不前。
c. 当目标点附近有障碍物时无法到达目标点。当AUV的目标点附近有障碍物并且在该点时AUV所受的合力的方向背离目标点,即AUV所受的斥力大于目标点对AUV的引力,这种情况下AUV无法到达目标点。
2 改进的人工势场的路径规划算法
新的斥力场函数为:
(7)
ρn(R,Rg)为AUV和障碍物之间的最小距离,ρn(R,Rg)的引入能够确保目标点处的总势场达到全局最小。当ρ(R,Rg)不为0,即AUV还未到达目标点时,此时的斥力为:

(8)
▽ρ(R,R0)和-▽ρ(R,Rg)是两个单位向量,前者表明斥力Fr1的方向由障碍物指向AUV,后者表明Fr2的方向是由AUV指向目标位置。当AUV在海洋环境运动时,假定海流对AUV的作用力为恒力,则AUV的受力情况变为:
F(R)=Fa(R)+Fr(R)+Fwav(R)
(9)
改进人工势场法AUV受力分析如图2所示。
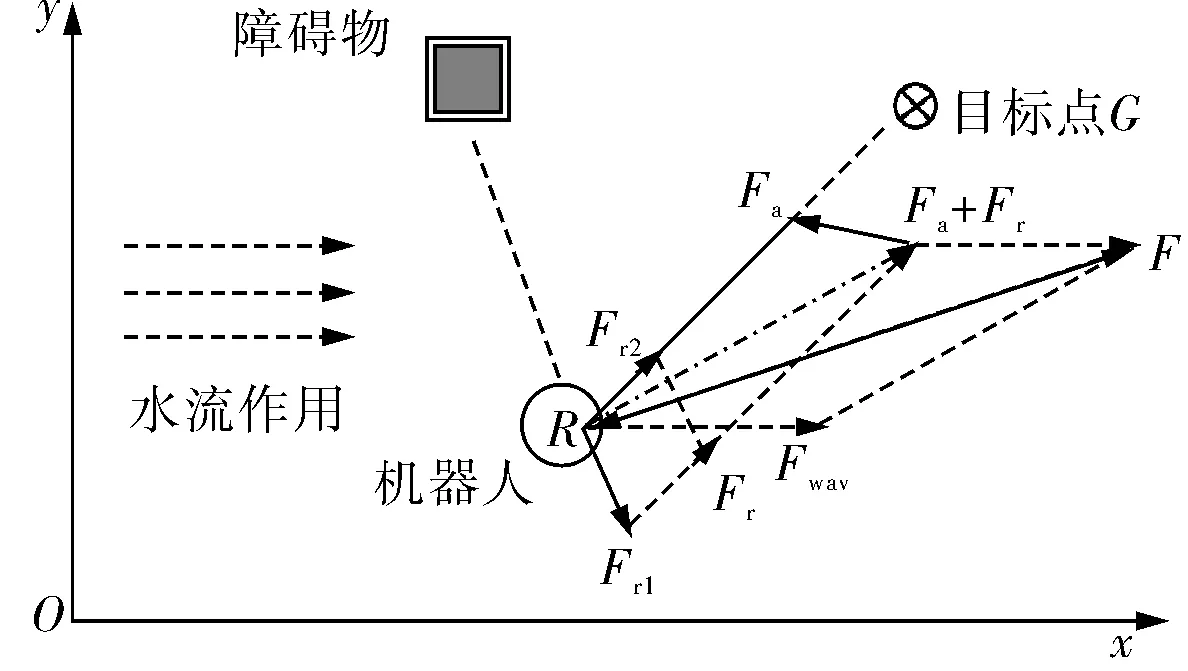
图2 改进人工势场法AUV受力分析
3 实验结果分析
使用Visual Studio 2005 编程,对改进的人工势场法进行仿真实验,仿真结果如图3所示。
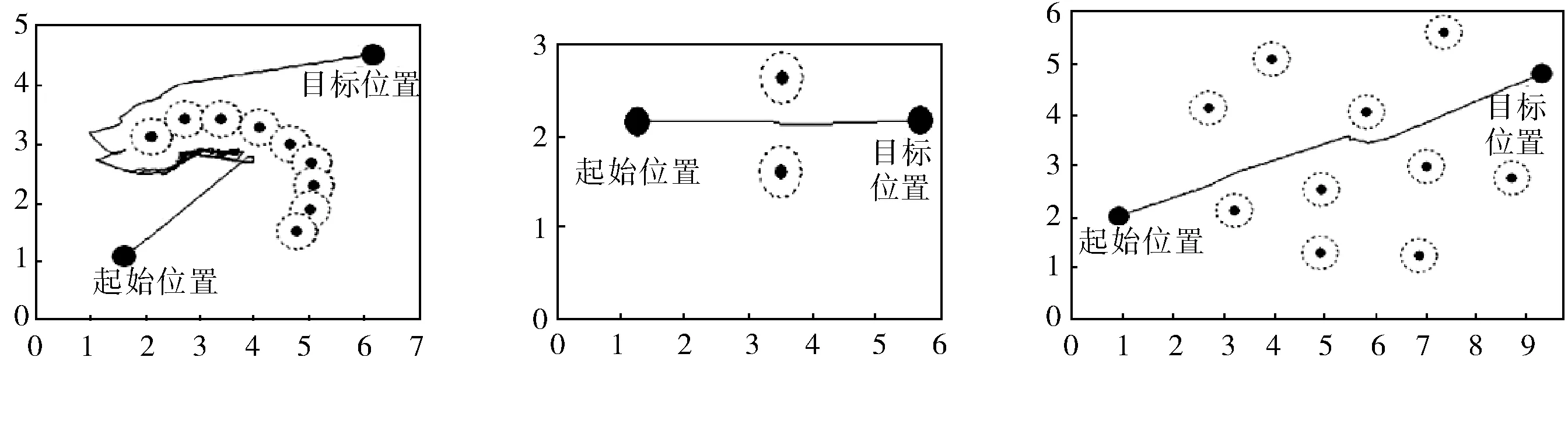
图3 AUV运动仿真
仿真结果表明:
a. 当AUV进入“死胡同”(例如U形障碍物)时,先会在某一时间内产生振荡,然后再绕过障碍物,顺着一条可行的路径到达目标点,而不会在U形障碍物内停滞不前。
b. 当两障碍物相隔很近时,AUV能够在两个障碍物之间找到路径顺利到达目标位置。
c. 当目标点附近有障碍物,并且在障碍物的影响范围之内时,AUV能够顺利到达目标位置。
4 结束语
人工势场法由于计算简单、反应速度快并且易于实现和扩展,因此在AUV实时路径规划中应用非常广泛。但是人工势场法也有一定的缺陷,笔者将改进的方法运用在自行研制的AUV上进行实验,结果表明:改进的方法效果较为明显,能够克服传统人工势场法存在的部分缺陷。
猜你喜欢
数学理论与应用(2022年1期)2022-04-15
北京航空航天大学学报(2021年4期)2021-11-24
宜春学院学报(2020年9期)2020-12-03
成都信息工程大学学报(2019年3期)2019-09-25
图学学报(2019年1期)2019-03-02
测控技术(2018年9期)2018-11-25
浙江大学学报(理学版)(2017年3期)2017-05-18
初中生(2017年3期)2017-02-21
系统工程与电子技术(2016年4期)2016-08-24
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
