
基于柴油机机体清洗设备行程同步问题的建模
2014-08-02 01:14:42何汪洋姜莉莉
化工自动化及仪表 2014年2期
何汪洋 姜莉莉
(广东工业大学机电工程学院,广州 510006)
在柴油机机体清洗设备行程控制系统中,液压回路占主导位置,液压主回路采用两个同步液压回路确保两个执行元件的一致。在同步液压回路中,由于不同的控制元件结构和性能,以及安装方法的差异,会引起同步液压控制回路的误差。设备研制实验过程中,液压双缸升降过程中会产生不同步误差(0~32mm),直接影响高压喷头的定位精度,最终导致清洗效果达不到预期。笔者利用伺服比例阀控制的液压同步系统,建立了液压同步系统的数学模型,通过Matlab软件模拟仿真,证明了此数学模型具有可行性。
1 双缸同步回路系统总体方案设计①
对于液压闭环同步控制系统,通常采用同等方式和主从方式两种控制方法。因为清洗机内的同步液压缸是立式安装的,并且是通过液压缸的同步升降来实现喷头平稳的升降和信号触发。由于在实际清洗过程中存在重心不对称,换不同类型连杆清洗时负载具有差别,液压回路流量、压力的波动,机械系统安装误差,夹具架上升过程中的偏振,以及运行后的累计误差等问题,笔者采用比例流量阀与伺服阀并行控制,同时采用主从方式的控制来保证此系统在下行过程中的同步精度,在主油路上采用双比例流量阀[1],控制双缸同步运行则采用伺服阀,工作原理如图1所示。
在系统空载运行时,通过系统输入信号来调节比例流量阀1、2,使液压系统中双缸达到初步的同步。由于调节比例阀流量的不一致,在双缸下行到最低端和最高端位置时,比例流量阀就无法满足双缸同步的精度要求,因为在最低端和最高端位置,双缸其中的一个会触发位置传感器改变运行方向,所以必须保证同步精度来维持系统的安全运行。针对这个问题,设计了一个基于伺服比例阀来控制双缸同步的控制系统,当达到指定位置时,比例阀才开始工作。缸G2为从动缸,位移传感器分别检测两缸的位置信号,然后进行比较,经放大电路放大后,通过偏差信号(电流)实现对缸G2进行补油或放油的功能,直到双缸达到同步要求。
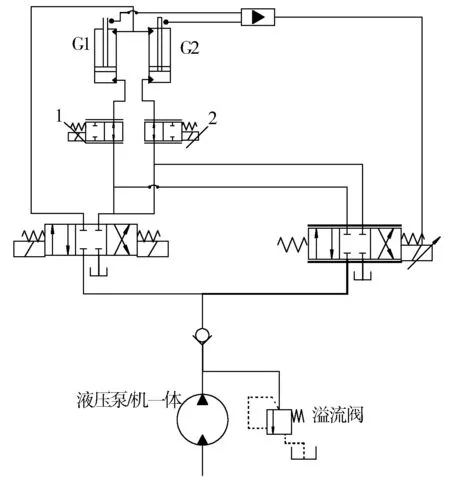
图1 液压双缸同步系统工作原理
2 双缸同步数学模型的建立
由图1可知,比例流量阀1、2分别接收触发、调节信号,达到双缸初步同步。因此缸G1为主动缸,缸G2为从动缸,改变指令信号(电压)即可改变两缸的速度。通过对其建立数学模型(图2)并仿真,来进行系统动态特性的分析。
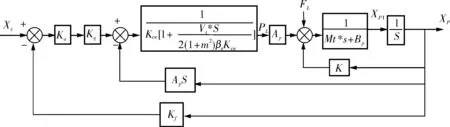
图2 双缸同步系统模型框架
在一般环境下液压缸系统没有弹性负载(即K=0),且在系统中没有负载干扰力项(FL=0),则系统框图可简化为:
(1)
式中A1——液压缸有杆腔的面积;
Ce——外泄漏系数;
Kc——阀的流量压力系数;
wh——液压无阻尼固有频率;
εh——液压阻尼比。
2.1 伺服比例阀模型
伺服比例阀选用MOOGD-633型,阀口流量系数Cd=0.38。其传递函数可由样表查得:
(2)
式中rc——阀芯与阀套间隙的行向间隙;
W——阀面积梯度;
μ——油液的运动粘度。
2.2 液压缸模型
液压双缸同步系统动态分析经常在零位工作条件下,此时其增量和变量相等,因此阀的线性化流量方程为:
QL=KqXv-KcPL
(3)
液压系统中动力元件的连续流量方程为:
(4)
式中Ctp——液压缸的总泄漏系数。
液压系统中液压缸的输出力与负载的平衡方程为:
(5)
式(2)~(5)完整地描述了阀控液压缸的动态性能,对其拉式变换并消去中间变量,其中由于负载特性为惯性负载(K=0),Bp一般很少可忽略不计,所以简化得到最终液压缸活塞的总输出位移是:
(6)
而指令输入为V、X时的传递函数为:
(7)
所以液压缸-负载的传递函数为:
(8)
其中,ωh=628。

取μ=1.4×10-2Pa·s,rc=5×10-6m,而全开口阀W=3.14d=22.6mm,即得Kce=65.84×10-12(N·m/s),所以εh≈0.214。则液压缸传递函数数学模型为:
(9)
液压双缸同步系统选用的位移传感器为SGC-2型光栅尺,其放大系数Kf=100。
3 仿真与分析
仿真时所选用的各仪表参数为:伺服比例阀选用MOOGD-633型,阀芯开口是矩形,液压缸的型号是MOB80×800-FA,无杆腔的有效作用面积A1=0.038m2,有杆腔A2=0.027 7m2,面积比m=0.73,总行程L=0.8m,液压缸负载质量M=75kg,粘性阻尼系数B=800N/m[2]。对液压双缸同步系统进行Matlab仿真得到的系统闭环bode图如图3所示。
由图3可知,此伺服比例阀控制的液压缸闭环响应频宽为35.5Hz,响应速度较快[3]。仿真结果可知此系统与实验所得的数据相似,故可证明该系统的数学模型是合理的。
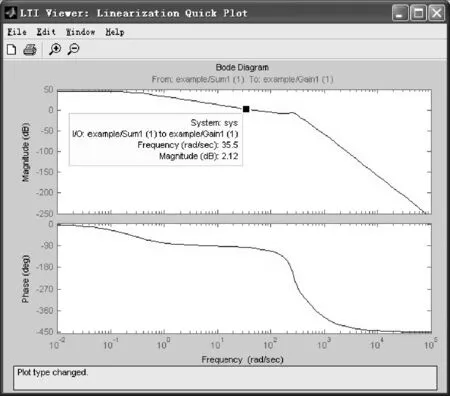
图3 液压同步系统闭环bode图
4 结束语
液压同步系统采用闭环控制,用反馈的功能来减少误差,因此与液压缸行程相关的累积误差将不会出现。系统中采用的伺服比例阀安装在支路上,通过伺服比例阀的流量合适,因此液压缸的同步性有较大的提高,且整个系统的响应速度加快。系统中的比例流量阀对液压缸的同步性进行了初步的调节,所以即使是伺服比例阀控制系统突然失效,也可对其起到保护作用。
猜你喜欢
机械研究与应用(2022年3期)2022-07-25 02:59:48
科技与创新(2022年12期)2022-06-26 03:45:16
冶金设备(2020年2期)2020-12-28 00:15:26
重型机械(2020年2期)2020-07-24 08:16:20
航天控制(2020年1期)2020-04-28 02:00:18
测控技术(2018年7期)2018-12-09 08:58:46
喜剧世界(2017年18期)2017-11-28 06:36:45
光学精密工程(2016年4期)2016-11-07 09:05:39
石油化工建设(2015年6期)2015-12-01 04:17:35
电测与仪表(2014年11期)2014-04-04 09:21:20
