
城市轨道安全门智能门机控制系统研究
2014-08-01 14:56王志飞
铁路计算机应用 2014年10期
王志飞
(中国铁道科学研究院 电子计算技术研究所,北京 100081)
城市轨道安全门智能门机控制系统研究
王志飞
(中国铁道科学研究院 电子计算技术研究所,北京 100081)
本文针对现有城市轨道安全门控制系统存在安全门夹人或挤人的问题,提出了基于图像特征匹配城市轨道安全门智能控制系统和方法。智能控制系统采用图像特征提取和匹配的方法,不仅能有效地减少图像目标识别运算时间,而且能实时判断列车车门和站台安全门之间是否存在异物,以及列车进出站的状态,做出智能化的判断和决策,从而能有效的保障列车安全节能运行及乘客的安全,以及安全门系统安全性、可靠性和可用性。
安全门;控制系统;图像匹配;轨道交通
目前,在城市轨道交通站台边缘广泛设置屏蔽门系统。屏蔽门将站台与行车隧道隔离开,对减少行车对站台环境的影响、降低地铁通风系统能耗、保证列车安全运行和乘客出行安全有着极其重要的作用。对安全门安全系统进行分析, 发现目前安全门的安全系统仍存在一些问题, 主要表现:由于车内乘客人数已经饱和或是人群拥挤混乱造成乘客还未进入车厢, 安全门已开始关闭,而影响安全门安全的主要因素是控制系统不够完善;此外,现有基于图像的门机控制系统易受环境(如光线的变化、烟雾和粉尘等)的影响,不能正常使用。所以,准确地探测和识别障碍物,进行精确的开门与关门控制是解决问题的关键。
1 系统组成及控制算法
智能门控系统主要组成如图1所示。
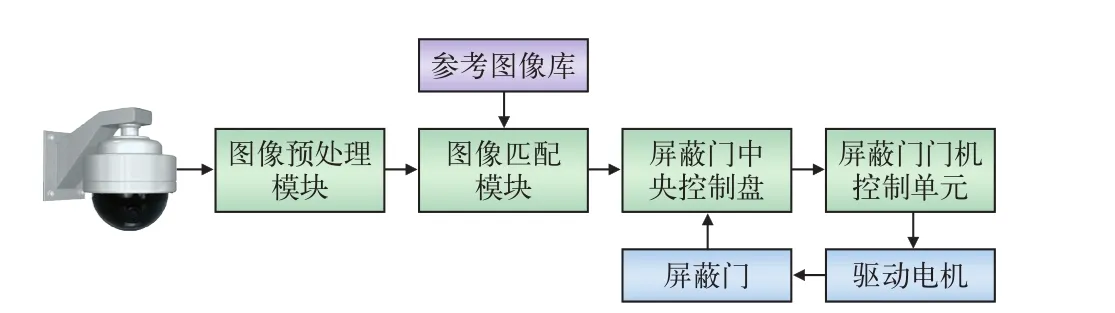
图1 智能门控系统的组成部分
首先,图像采集模块用于采集站台安全门与列车之间的实况图像,将所述实况图像经A/D转换为数字图像,并将数字图像传送到图像预处理模块。图像预理模块对实时图像进行图像增强、滤波和特征提取后传送到图像匹配模块,同时图像匹配模块向参考图像库中获取相应参考图像,参考图像库主要是由不同的时间段和不同光电传感器采集的列车进出站,以及安全门在不同开关状态下的图像。图像匹配模块从参考图像库中读取所述相应参考提取参考图像的边缘特征图,并完成图像匹配。最后,系统根据匹配结果生成相应的控制指令,并将所述控制指令发送至安全门中央控制盘,并根据实况图像和参考图像的匹配的结果,进行实时“打开或关闭安全门”的控制。
2 图像匹配方法和控制指令的形成
智能门机系统的图像匹配方法是采用光电传感器在采集的进出站列车实时信息与预先制备的计算机里存储的列车进出站信息进行实时匹配计算,从而根据匹配结果来下达开关门指令的方法。城市轨道智能门机控制系统的关键技术取决于图像匹配算法的准确性。光电传感器采集列车进出站的信息经图像预处理和图像的特征提取后,进行图像的大小尺度和方向尺度的变换,得到与相应参考图像大小尺度和方向尺度均相同的变换实况特征图像;参考图像同样经图像预处理和特征提取后,进行图像的大小剪切得到和实时图像同样尺寸大小的图像。考虑到城市轨道屏蔽门环境比较复杂,光电传感器易受城市轨道运营环境的影响,得到实时灰度图像与存储的参考图像容易产生灰度不一致甚至相反。因此,在城市轨道运营的环境下不宜采用基于灰度的图像匹配算法,而采用基于图像特征的匹配算法更为合适。基于图像特征匹配流程如图2所示。
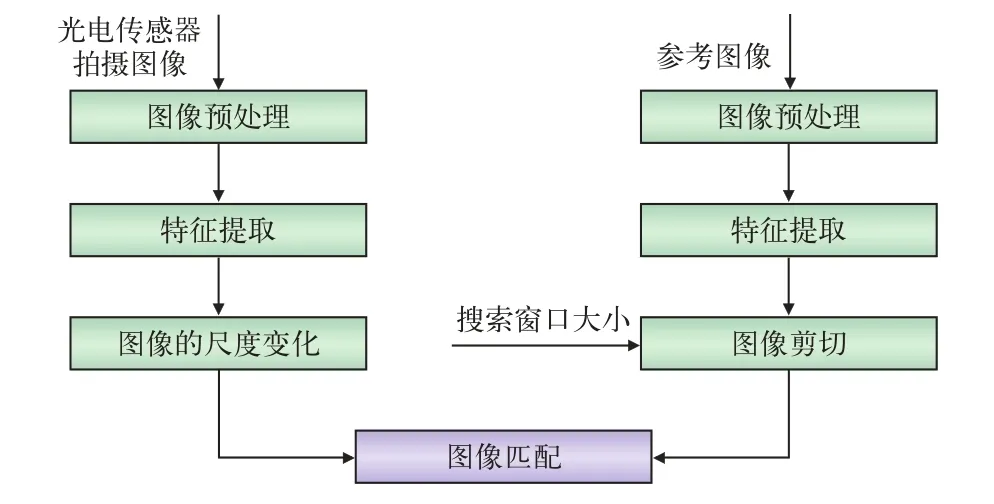
图2 智能门机控制系统的图像匹配流程
2.1 图像预处理和特征提取技术
图像增强主要采用灰度变化和中值滤波。由于对实时图像和参考图像进行边缘信息保护,所以采用中值滤波,即将图像的像素按灰度值由小到大排列再取序列中间点的值作为中值,并以此值作为滤波器的输出值。图像修复通过对数字图像建立相应的数学模型,从被污染或畸变的图像信号中提取所需要的信息,沿着使图像失真的逆过程恢复图像本来面貌。
(1)智能门机系统的图像匹配中,图像的边缘特征提取采取Canny算子,得到的二值图像分别用0和1来表示(其中1代表特征点,0代表非特征点)。(2)采用去噪和细化的方法,对二值图像上的空洞、孤立点进行填补和去除;突出图像的轮廓特征,更利于图像匹配过程中减小搜索空间。(3)采用Hausdorff有向距离对不同的特征点进行加权,其中分支点的权值是大于其它特征点的。分支点的提取模板如图3所示。分支点周围像素的值从0变到1或从1变到0的次数T为6次详情见图4所示。

图3 3×3模板图
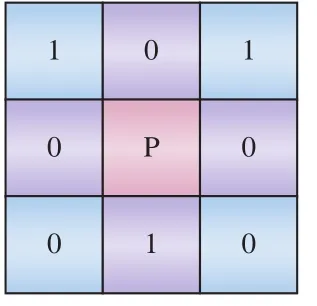
图4 分支点特征
分支点的判断公式如下:

其中, Pi=0或1,P9=P1。
2.2 图像的尺度调整
2.2.1 大小尺度的变化
实况图像和参考图在特征提取时,必须保持与参考图像大小和方向尺度相同,大小尺度换算公式如方程:
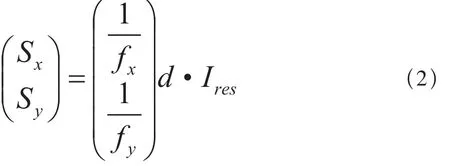
式中:Sx、Sy—分别为x、y方向上的实况特征图像;fx、fy—分别为实况特征图像焦距在图像平面 x和y的长度;d—图像采集模块距地面的高度;IRes—参考图像的分辨率。
2.2.2 基于Hough变换的方向尺度调整
为了保证实时图与参考图的方向尺度一致。设定围绕Zv轴旋转直到与参考图方向一致,Zc轴与 Zv轴保持平行且指向下方。通过使用多Hough变换来保证图像的方向尺度的一致。

式中:ρ—坐标原点垂直于直线矢量;θ—直线矢量与图像轴X的夹角。
基于Hough变换的方向尺度调整算法的步骤如下:(1)实时图像按公式上述大小尺度变换后,把调整后的图像定义为image1;应用站台信息,旋转实时图像至竖直向上对准(参考图像也竖直向上对准);(2)提取一幅图像中心点且与image1大小尺寸相同,且没有经过方向尺度调整的图像定义为image2;(3)对image1和image2进行Hough变换,并检测出两幅图像的相关直线;(4)计算image1和image2两幅图像的相关直线的角度差分,并求出平均角度差分 θavg;(5)如果|θavg|小于45。,逆时针旋转image1的θavg来保持image1的方向。
2.2.3 基于特征的图像匹配技术
传统Hausdorff距离算法有其局限性,即不能克服非高斯噪声的影响,但在实际情况中,噪声和几何形变都是难以避免的。因此采用一般特征点和分支点分别加权求平均的加权Hausdorff距离算法,相应的权值计算公式具体如下:
式中:hWHD(A, B)为点集A到点集B距离,hWHD(B, A)为点集B到点集A的有向距离;A,B分别代表两个不同特征点的集合;Na代表点集中特征点的数量;d(a, B)代表点集A上特征点a到点集B的距离。
根据图像匹配方法得到的结果可以确定以下状态:列车进站后停靠站台且安全门与列车间无异物;列车进站后停靠站台但安全门与列车间有异物;站台无列车且在安全门与轨道之间无异物;无列车停靠站台且在安全门与轨道之间有异物。
2.3 控制指令的形成
智能控制系统以图像的匹配的结果为指导,对光电传感器采集的图像进行实时识别,从而判断现场有无异物。并实时下达以下控制指令:(1)列车进站后停靠站台,下达先打开车门再开安全门指令;(2)列车停靠时间到确认“根据匹配结果确认安全门与列车之间无异物”后下达关门指令;(3)列车停靠时间到确认“根据匹配结果确认安全门与列车之间有异物”后禁止关闭安全门并报警;(4)“根据匹配结果确认站台无列车且轨道间无异物”下达列车进站指令;(5)“根据匹配结果确认站台无列车但轨道间有异物”下达列车禁止进站指令。
3 结束语
本文针对现有城市轨道安全门控制系统存在安全门夹人或挤人的问题,分析了基于图像特征匹配城市轨道安全门智能控制系统和方法。经大量的仿真试验证实该系统能有效地识别安全门与列车之间的实际状况。因此,较之现有同类技术相比具有以下优点:(1)建立的站台安全门门控系统,能有效地识别列车进站、出站和不停靠直行通过的3种运行状态;列车进站后,能够有效的识别乘客上下车状况;(2)由于该系统采用了图像特征信息的提取技术,能减少图像目标识别运算时间,使安全门门控系统具有实时性;(3)对列车离站后的安全门与轨道之间是否出现异物进行实时监视,加强了列车运行和乘客出行的安全;(4)本系统图像匹配中采用多传感器信息(可见光、红外等图像)的融合技术,即可采用多种传感器对实况进行图像采集,并对此图像进行处理,对恶劣环境(如光线的变化、烟雾和粉尘等)具有很好的适用性。
[1]高 军,李学伟,张 建,等.基于模板匹配的图像配准算法[J].西安交通大学学报,2007,41(3):307-309.
[2]权 文,王晓丹,王 坚,等.一种基于小波分解的快速图像匹配算法[J].航空计算技术,2008,38(4):8-10.
[3]冷雪飞,刘建业,熊 智.基于分支特征点的导航用实时图像匹配算法[J].自动化学报,2007,33(7):678-682.
[4]牛林杰,李国伟,李新琴.双鉴探测应用于地铁屏蔽门的分析[J].交通科技与经济,2013,15(1): 122-124.
[5] 郭 进, 张秀彬.基于图像识别技术的站台屏蔽门智能控制系统[J].微型电脑应用,2011,27(3):26-28.
责任编辑 徐侃春
Intelligent Control System of platform screen door for Urban Transit
WANG Zhifei
( Institute of Computer Technologies, China Academy of Railway Sciences, Beijing 100081, China )
The existing Intelligent Control System of platform screen door was with the problems of clip or squeeze. The methods of image feature extraction and matching were put forward for solving the problems. The methods could not only effectively reduce operating time of the image target recognition, but also could realtime judge whether there was foreign body between exit train doors and platform, as well as the state of train in or train out of the station, let the train make intelligent judgment and decision, effectively ensure the safety of train running and the safety of the passengers, as well as the security, reliability and availability of the existing system.
platform screen door; Control System; image matching; Urban Transit
U231.6∶TP39
A
1005-8451(2014)10-0060-03
2014-04-09
王志飞,助理研究员。
猜你喜欢
微型电脑应用(2022年3期)2022-04-20
中国生殖健康(2020年2期)2021-01-18
房地产导刊(2020年8期)2020-09-11
铁道通信信号(2020年8期)2020-02-06
铁道通信信号(2020年8期)2020-01-05
铁道通信信号(2019年1期)2019-01-16
中国生殖健康(2018年2期)2018-11-06
铁道通信信号(2018年6期)2018-08-29
计算机测量与控制(2017年6期)2017-07-01
中央民族大学学报(自然科学版)(2014年1期)2014-06-11
