
机载LIDAR技术在国土行业的应用
2014-07-27 06:21:40张天巧赵瑞睿
创新科技 2014年10期
张天巧 赵瑞睿
(1.广州建通测绘技术开发有限公司,广东 广州 510663;2.广东省鹤山国土局,广东 鹤山 529700)
机载LIDAR技术在国土行业的应用
张天巧1赵瑞睿2
(1.广州建通测绘技术开发有限公司,广东 广州 510663;2.广东省鹤山国土局,广东 鹤山 529700)
本文介绍了机载LiDAR测量技术的主要原理与方法,并结合LiDAR产品特点和国土行业的需求,详细阐述了该技术在国土行业中的应用。
机载LiDAR;国土行业;三维模型
机载LiDAR测量系统是一种主动航空遥感装置,是实现地面三维坐标和影像数据同步、快速、高精确获取,并快速、智能化实现地物三维实时、变化、真实形态特性再现的一种国际领先的测绘高新技术。该技术基于激光测距、GPS定位、惯导测量、及航空摄影测量原理,可以快速、低成本、高精度地获取三维地形地貌、航空数码影像等空间地理信息数据。
机载LiDAR技术是当前测绘行业前沿技术,该技术集成了惯性导航技术、卫星定位技术和激光测距技术,具有在大范围内高效地获取多种高精度数据的能力,并且具有精度高、产品多、效率高,人为影响因素小的特点。这必将在技术上和应用上根本解决现存的诸多问题,大大促进地理信息产业的发展和充分发挥空间地理信息在经济和社会中的作用。
1 机载LiDAR测量技术
1.1 系统组成及工作原理
机载LiDAR系统主要由激光扫描系统、GPS、IMU、数码相机、监控和控制系统组成,其中LiDAR传感器和IMU是系统的核心部件,LiDAR传感器是发射测量激光脉冲和接受激光脉冲遇到障碍物(目标)后所反射的回波,IMU为确定任一瞬间平台在空间中的姿态,GPS为LiDAR系统提供精确的定时和定位数据。数码相机可以为获得高分辨率的影像数据,监控及控制系统在系统采集数据的同时为操作人员提供有效的实时监控信息。对以上数据进行处理,可以获得DOM、DEM、DSM、DLG、三维数字模型等产品。
1.2 航飞计划制定及数据采集
1.2.1 在航飞前要制订飞行计划。航飞计划应包括航带划分,确定飞行高度、速度、激光脉冲频率、航带宽度、激光反射镜转动速度、数码相机方位元素及定位、相机拍摄时间间隔等,并将各航带的首尾坐标及其他导航坐标输入导航计算机内,在飞行导航控制软件的辅助下进行飞行作业。
1.2.2 安置GPS接收机。为保证飞机飞行各时刻的三维坐标数据的精度,需要在地面沿航线布设一定数量的GPS基准站,同时将GPS流动站安置在飞机上。
1.2.3 激光扫描测量。预先设置好扫描镜的摆动方向和摆动角度,当飞机飞行时,红外激光发生器向扫描镜上不停地发射激光,通过飞机的运动和扫描镜的运动反射,使激光束打到地面并覆盖测区,当激光束到达地面或遇到其他障碍物时被反射回来,被一光电接收感应器接收并将其转换成电信号。根据激光发射至接收的时间间隔即可精确测出传感器至地面的距离。
1.2.4 惯性测量。当飞机飞行时,惯性测量装置同时也将飞机的飞行姿态测出来,并和激光的有关数据、扫描镜的扫描角度一起记录在磁带上。
1.2.5 数码相机拍摄。利用数码相机进行拍摄时,需要对其拍摄时间间隔和拍摄位置进行控制。通常是用GPS系统进行时间和位置控制。
1.2.6 数据传输。航飞数据采集结束后,将所有的激光扫描测量数据、数码影像数据、GPS数据及惯性测量数据都传输到计算机中,为后续数据处理作准备。
1.3 数据处理
机载激光雷达测量系统在野外采集得到的数据需要进行一定的处理才能得到需要的信息。数据处理的内容包括:
1.3.1 确定航迹。将地面的GPS基准站和飞机上的GPS流动站的测量数据进行联合差分解算,即可精确确定飞行轨迹。
1.3.2 激光扫描测量数据处理。利用仪器厂家提供的随机软件,对飞机GPS轨迹数据、飞行姿态数据、激光测量数据及激光扫描镜的摆动角度数据进行联合处理,最后得到各测点的(X、Y、Z)三维坐标数据。
1.3.3 数据分类处理。可以根据高出地面的高度对非地面点数据进行分类,如可以对不同的植被进行分类。然后把输出分类的数据。
1.3.4 航带拼接和坐标转换。将每条航带点云数据和参考面数据进行比较,对点云进行平面和高程检查和校正,小于限差后,再进行航带拼接。平面坐标转换应采用布尔莎七参数法,高程坐标转换应采用多项式曲面拟合法进行数据转换。
1.3.5 影像数据的定向和镶嵌。数字影像先进行解压处理,再结合航片的内外方位元素进行空中三角测量,然后结合激光扫描测量的DTM数据进行定向镶嵌,形成正射影像图。
1.3.6 在以上数据基础上制作DLG图和建立三维模型。
2 机载LiDAR测量的产品
2.1 三维激光点云数据
激光点云数据不仅仅包含X、Y、Z坐标信息,还包括如反射强度等其他多种信息。根据具体需求,激光点云数据密度可达到100点/平方米以上,高密度的激光点云数据能精确反映地形地貌细节。
2.2 数字高程模型(DEM)
基于激光点云数据能够快速高质地生成高精度DEM成果,DEM高程可达到优于10厘米精度。
2.3 数字表面模型(DSM)
DSM是用含有首次回波信息的激光数据拟合生成的地表模型,DSM模型对地表的房屋和树木有很好的表现。
2.4 数字正射影像(DOM)
DSM是用含有首次回波信息的激光数据拟合生成的地表模型,DSM模型对地表的房屋和树木有很好的表现。
2.5 大比例尺地形图(DLG)
利用激光点云和DOM影像可快速生产大比例尺(1:500至1:2000)DLG产品。
2.6 三维模型
在三维建模软件支持下,以对应的数码影像数据为参考,采用人工绘制的方式可以比较精确地对城市建筑物进行三维建模。
3 机载LiDAR技术在国土行业的应用
机载LiDAR技术不仅可以得到常规的DOM、地形图等数据,还可以得到三维点云、DEM、DSM和三维模型等数据,利用以上数据或者以上数据合成数据,实现对国土资源“批、供、用、补、查”全程的监管。
3.1 三维量测和计算
利用点云数据和DOM数据可以对建筑物进行高度、宽度、直线距离、倾斜距离、投影面积、表面积、土方量等进行量测和计算。(见图1)

图1 三维面积量测
3.2 土地利用规划分析和评价
利用地形图制作入库数据得到土地资源数据库,结合上轮规划实施评价、土地利用现状与布局、本轮规划目标等,辅助编制土地利用规划。(见图2)
图2 用地规划分析
3.3 用地报批和无纸化审批
基础地理数据(DOM和DEM)和土地专题数据,实现在三维可视化场景中完成地类核查与分析等整个用地报批流程。可以实现以地查图也可以以图查地。(见图3)
3.4 三维地籍管理
三维地籍管理,利用(DOM和DEM)和地籍数据,可实现宗地平面与空间三维可视化立体管理,在二维系统的基础上,进一步实现地表、地上、地下土地使用权的有效管理,更可直观反映宗地用途、建筑容积率。(见图4)
3.5 土地利用动态监测和执法监察
利用两期高清晰的影像数据结合点云数据,可以快速自动对地面建筑物的变化做出监测,及时发出预警,可以直接将结果反馈到移动终端,辅助执法部门现场执法。(见图5、6)
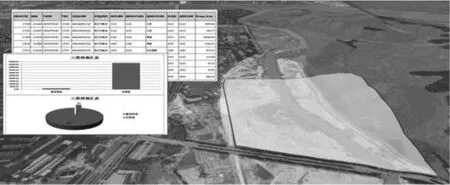
图3 用地报批

图4 三维地籍

图 5 土地利用动态监测

图6 现场执法监察
3.6 土地确权和高标准农田建设
基于高分辨率影像数据,以易于理解的影像地图方式进行土地确权,1:2000线划图可以满足高标准农田建设的规划设计要求。
4 结束语
激光雷达技术作为近年来航空遥感技术发展的一个重要里程碑,无疑代表着航空遥感技术未来的发展方向。而机载激光雷达优化选线技术自身的优势以及未来国土建设、智慧城市以及运营维护等对三维空间信息的需求,都将使其成为未来国土行业的发展趋势,其在电国土行业中必将具有很好的应用前景。
[1]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社.
[2]徐祖舰.机载激光雷达测量技术及工程应用实践[M].武汉:武汉大学出版社,2009.5.
[3]刘殿辉.机载LiDAR技术在城市3D数字产品中的应用[J].城市建设理论研究,2013.
[4]王玲玲.机载激光雷达测量技术在山区高速公路勘测设计中的应用[J].公路交通科技,2010.
P231
A
1671-0037(2014)05-28-2
张天巧(1983-),男,副总工程师、注册测绘师,研究方向:机载LiDAR技术实践与应用。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
河北地质(2021年4期)2021-03-08 01:59:20
科学(2020年5期)2020-11-26 08:19:24
音乐天地(音乐创作版)(2019年7期)2019-09-19 12:33:52
小学生学习指导(中年级)(2019年6期)2019-06-01 02:48:04
小学生学习指导(高年级)(2019年6期)2019-06-01 01:50:28
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
中国交通信息化(2019年1期)2019-03-26 06:43:46
