面向目标搜索的轮式机器人的设计与研究
2014-07-25 11:29严锡君赵光辰
微型电脑应用 2014年8期
严锡君,赵光辰
面向目标搜索的轮式机器人的设计与研究
严锡君,赵光辰
应用嵌入式技术、无线传输技术和图像处理技术,设计搜救机器人,为防灾救灾提供技术服务。采用ARM 11微控制器LM3S9B96设计机器人和手持终端,机器人通过所携带的摄像头采集图像并进行压缩后,通过wifi传输给手持终端;手持终端用TFT液晶屏显示所接收到的远程图像信息,并通过用户界面通过wifi 向机器人发送控制命令;机器人根据命令控制自身的运动以及摄像头的转动。实验结果表明,采集的图像清晰、命令执行及时可靠,能够较好地完成目标探测、搜索等任务。
机器人;目标搜索;无线通信;图像采集
0 引言
近年来大规模的灾难、事故频发,对人类的生命和财产造成极大危害,及时、有效地投入防灾救灾可大大降低灾害损失,研究高效的施救设备具有特别重要的意义。随着科技的进步,新型技术成为救援的制胜法宝,尤其是机器人技术[1]。因具有灵活、重量轻、以及可深入危险区域工作等优势,搜救机器人在灾后救援工作中起着越来越重要的作用[2],此类机器人需要具备稳定的运动控制、采集多种环境信息、以及无线控制等功能[3,4]。可见,搜救机器人需完成的功能多、涉及技术广、环境状态不确定,因此存在设计难、可扩展性差、缺少丰富的通讯能力、研究成本高等问题[5]。
针对以上问题,本文根据机器人系统的可扩展、可裁剪、以及互操作等特性,采用模块化方法设计并实现一个机器人原型系统,通过无线通信实现机器人控制及数据传输,以完成目标探测、搜索以及安全监控等功能。
1 轮式机器人系统设计
1.1 硬件体系结构
搜救机器人须具备一定的移动速度、低能耗、运动稳定性、适应多样的地理环境,以及有爬坡、越障能力。其中,轮式移动载体的结构简单,可省去复杂的机械设计,且运动速度快,可减少目标搜索时间。为此,采用四轮驱动方式,增强机器人的移动能力。
搜救机器人包括手持控制终端和轮式机器人两部分,两者之间通过wifi无线通信方式传输图像和控制信息;机器人通过所携带的摄像头采集图像并进行压缩后,通过wifi传输给手持终端;手持终端用TFT液晶屏显示所接收到的远程图像信息,并以此通过用户界面通过wifi 向履带式机器人发送控制命令信息,机器人以此命令提供电机驱动电路,控制直流电机的转动、启停,实现机器人的前进、后退、左转、右转等运动,以及摄像头180°的转动、以调整拍摄角度[6]。机器人主控制板以ARM Cotex-M3内核的LM3S9B96微控制器为核心,主要完成无线数据接收、图像数据处理电机控制信号输出等功能。机器人硬件体系结构如图1所示:
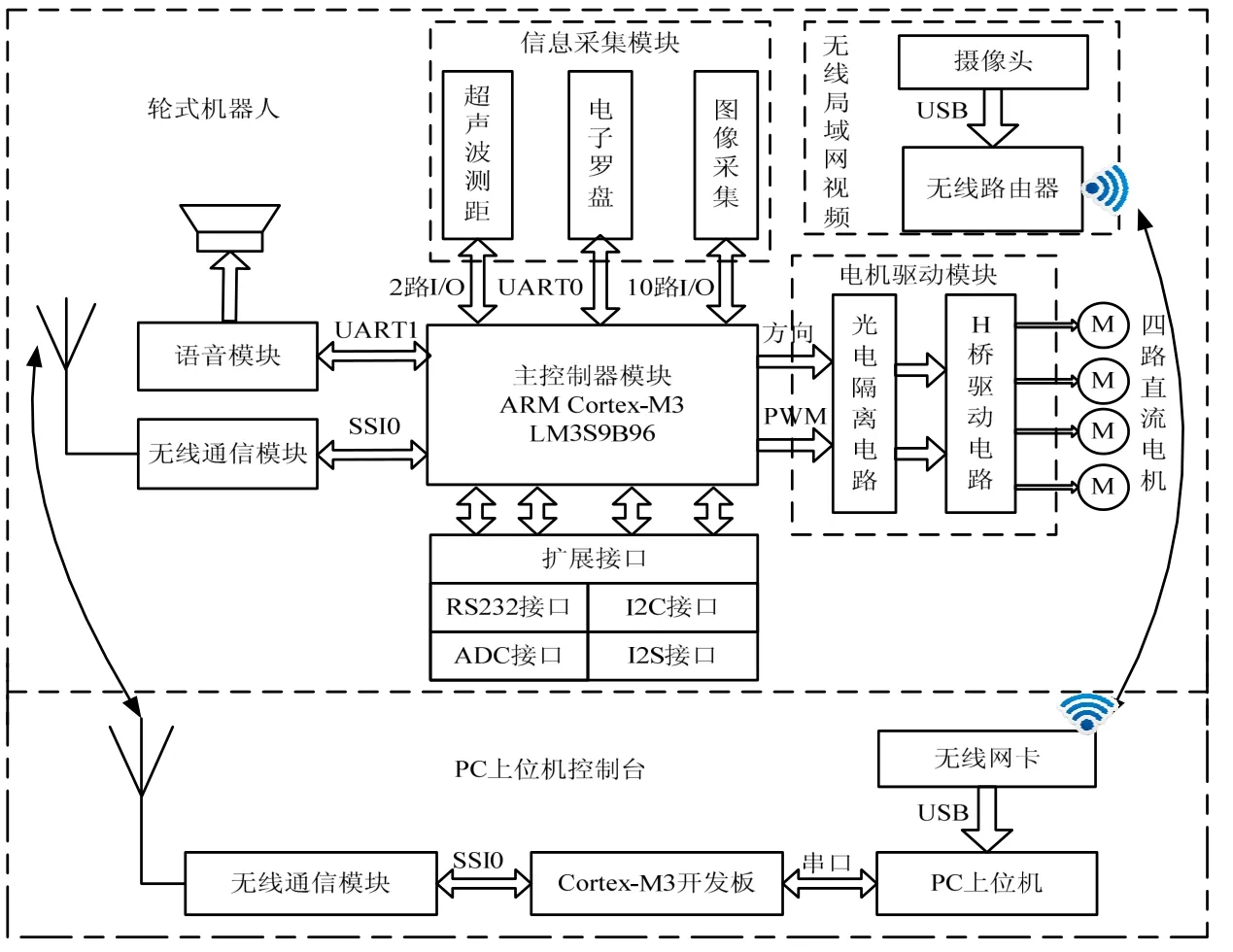
图1 机器人硬件体系结构
1.1 目标搜索功能模型
在目标探测、搜索过程中,涉及的控制操作较多,各功能模块间的调用关系较复杂。为此,采用的UML进行模型分析,完成应用程序功能模型设计,建立系统操作用例图(Use-Case)。系统被抽象为操作员、机器人系统和手持终端控制台3部分,操作员通过操纵手持终端控制台与轮式机器人进行对话。软件的应用程序功能模型如图2所示:
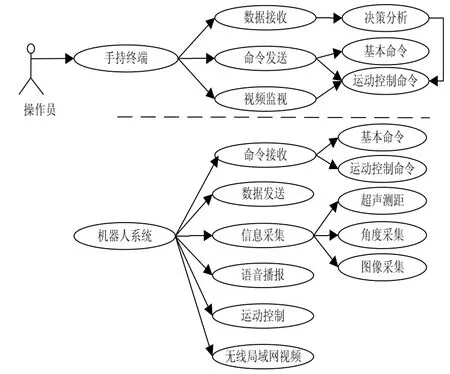
图2 应用程序功能模型
机器人系统主要完成以下功能:
1)命令接收:接收控制台的指令。指令分为基本指令和电机控制命令。前者控制电机驱动板输出;后者控制机器人基本行为,例如开始采集、停止采集等。
2)数据发送:将采集到的数据通过无线通信模块发送给PC上位机控制台。
3)信息采集:传感器探测包括图像、温度、障碍物距离以及运行方向等信息。
4)语音播报:机器人搜索到目标时进行语音报警动作。
5)运动控制:实现前进,后退,左转,右转,停止等基本功能。
6)无线局域网视频:实现环境视频采集与传输。
2 系统实现
2.1 电源
为了使移动机器人运动方便,必须自带电源。其中,机器人控制电路采用5V直流供电,电机驱动部分则需要12V直流供电,为了减少控制电路受到电机运动的干扰,采用独立供电方式。主控制板功率消耗较小,通过LDO芯片AMS1117、LM4040B、XC6206P122等来实现3.3V、3.0V及1.2V电压转换;而电机板功率消耗较大,为了提高使用效率,通过开关电源LM2576实现5V电压输出。电源转换电路如图3所示:
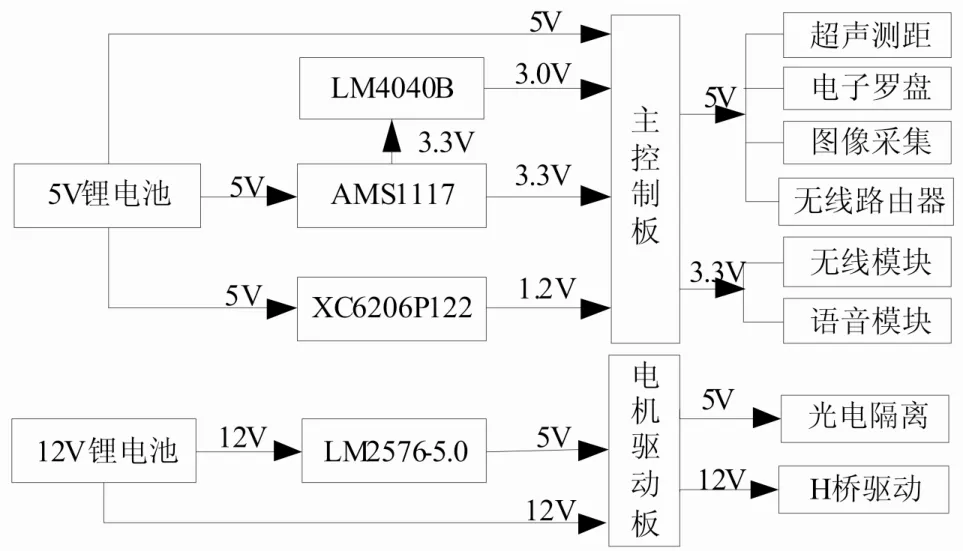
图3 电源系统结构
2.2 电机驱动
电机驱动电路由H桥和光电隔离电路两部分组成,采用4片LMD18200H桥芯片实现机器人的四路直流电机控制。为提高抗干扰性,主控芯片与电机驱动放大电路之间通过光电耦合器实现隔离。MCU从GPIO输出控制信号,经低速光耦TLP521光电隔离后输出给LMD18200,控制电机的启停;由于LM3S9B96的PWM输出信号频率较高,采用高速光耦6N137实现信号隔离,控制电机的运转速度。电机驱动电路如图4所示:
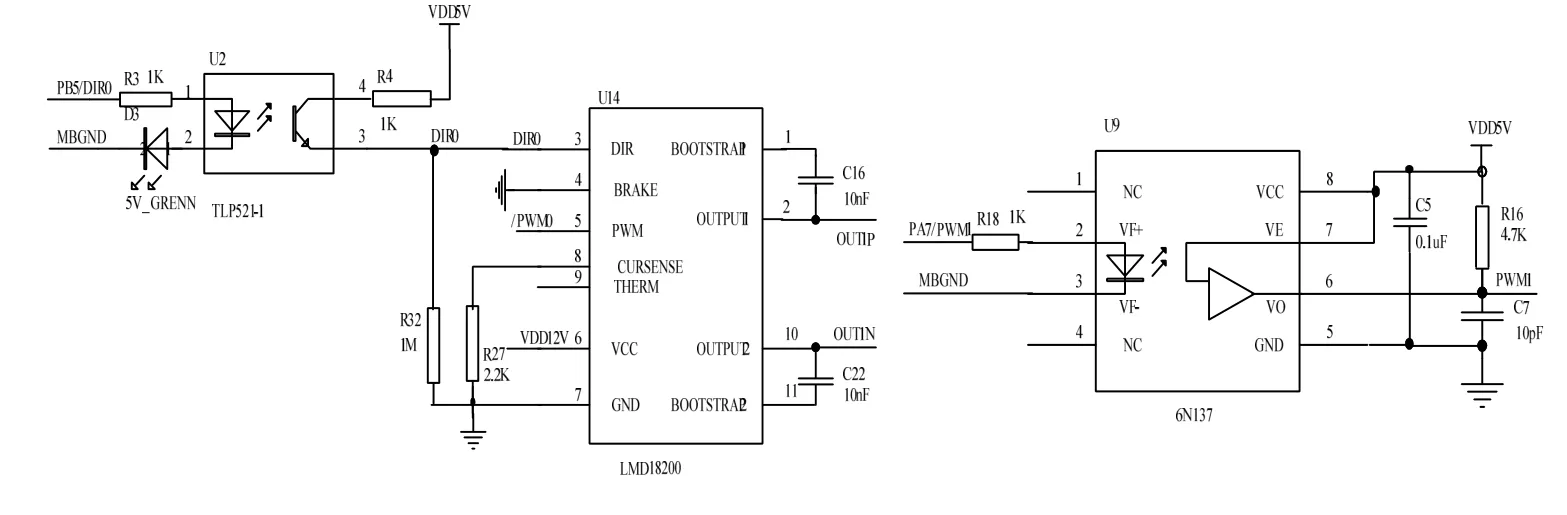
图4 电机驱动电路
2.3 无线传输
射频芯片选用nRF24L01+2.4GHz射频收发器件,主控制器通过SPI端口控制无线模块。
无线传输模块主要有两个功能:接收手持终端的控制命令和发送图像数据至手持终端。nRF24L01+无线收发模块的发送和接收流程如下:
(1)发送流程:将无线模块配置为发送模式,设定节点地址、通信频率等,控制CE信号输出20us脉冲信号。装载待发送数据至发送FIFO中,等待IRQ中断信号,读取STATUS寄存器值,判断是否发送成功,清除相应中断状态,返回。
(2)接收流程:将无线模块配置为接收模式,保证CE信号为高电平。等待中断信号,读取STATUS寄存器值,判断接收FIFO中断是否置1,若置1则开始读取内容到缓冲中,然后清除中断状态;若未置1,直接清除中断状态,返回。
无线传输模块发送和接收流程如图5所示:
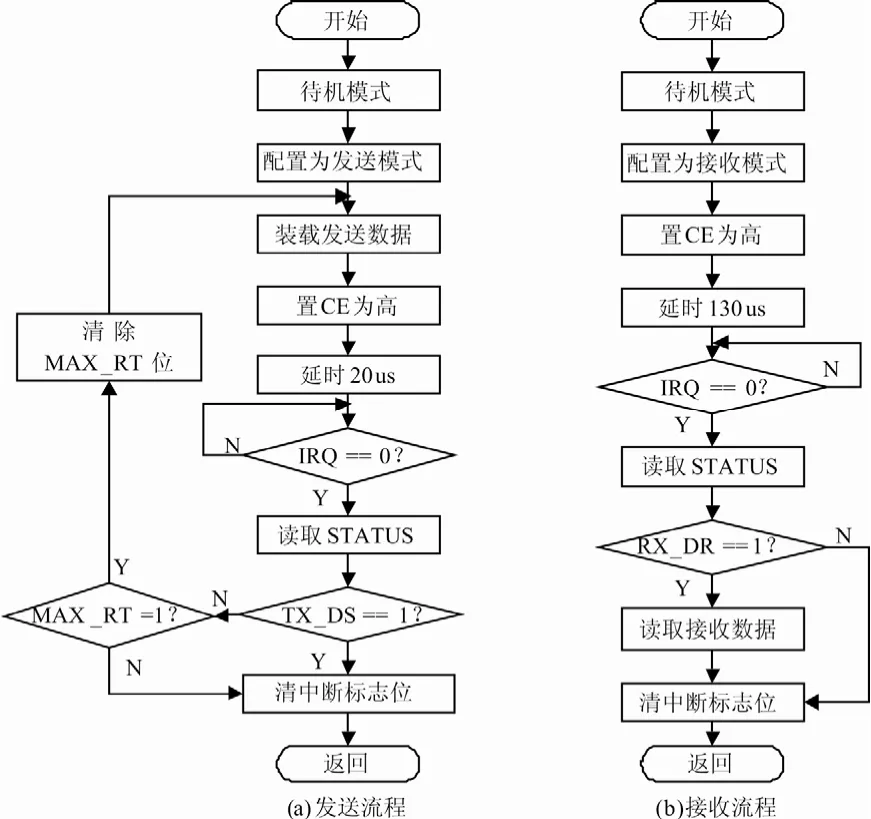
图5 无线传输模块发送和接收流程
2.4 图像采集
远距离搜索和探测目标时,通过监测图像判别是否搜索到目标,采用CMOS图像传感器OV6620实现图像采集。主控制器通过I2C接口初始化OV6620设置,外部中断接口连接芯片的场中断信号及行中断信号,数据端采集灰度数据。
图像数据的采集主要由场中断VSYNC信号标记一幅图像开始,行中断信号HREF标记一幅图像的每行的开始,信号PCLK则代表了每个像素点的时序。
由于PCLK周期太短,捕捉该信号耗时过大,因此系统只尽量多采集图像点。另外,根据OV6620数据手册,完全采集图像数据需要100KByte RAM空间,而LM3S9B96控制器的RAM空间仅有96KB,且大数据量不适合传输。因此,采集程序做了一定改进。由于每张图像的前几行和后几行是无效的、每行的前几个点也是无效的,因此采集系统舍弃前10行、最后8行、以及每行前10个点,同时隔两行采集一次。因此,一幅图像只采集90行,每行采集75个点。虽然无法得到完整图像,但是图像质量不影响目标判定。
采集一帧图像的程序流程主要有以下3部分组成,如图6所示:
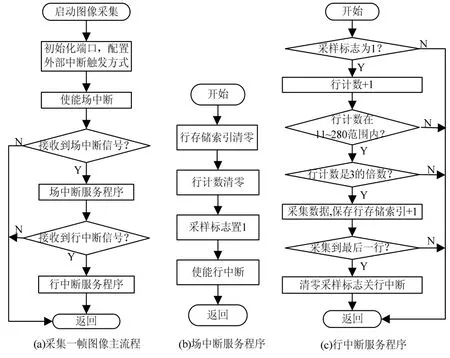
图6 图像采集的流程
(1)主流程:初始化I/O端口并进入场、行中断的触发方式,等待图像采集的开始。接收到场中断信号表明开始一帧图像的同步,进入场中断服务程序,设置相关参数,等待行中断信号。接收到行中断信号则表明每行图像的开始点,进入行中断服务程序,采集并保存数据。流程如图6(a)点,进入行中断服务程序,采集并保存数据。流程如图6(a)所示。
(2)场中断服务程序:设置采样标志,表明采集的图像数据有效。清零行存储索引、行计数以保证每帧图像存储有效,启动行中断,等待行同步。流程如图6(b)所示。
(3)行中断服务程序:判断场信号是否同步,场同步则开始进行行计数。设置行计数标志及延时,完成图像数据的采集与保存。采集好每行数据后,行存储索引计数加1,直到所有行采集结束,最后清除图像采集标志,关闭行中断信号。为了保证图像采集的完整,行中断优先级要高于场中断。流程如图6(c)所示。
采集的实际图像与原图像的对比情况如图7所示:
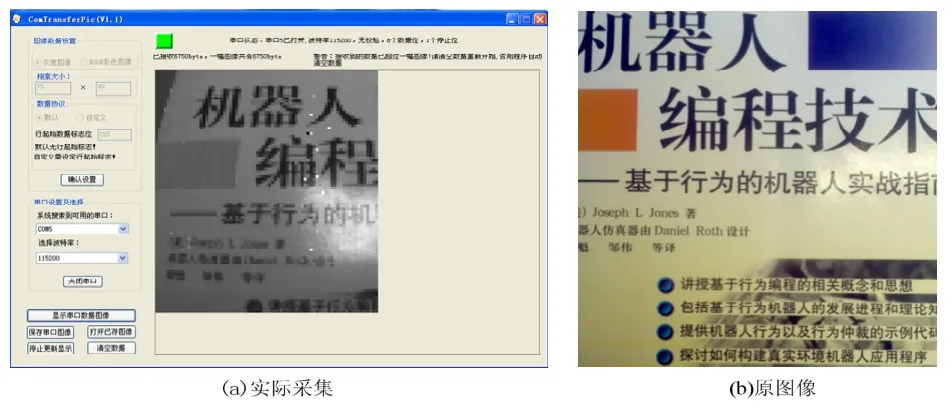
图7 实际图像与原图像的对比
3 总结
实验表明,以模块化轮式机器人实验平台在实验室环境中可以较好地完成目标搜索任务。整个系统采用半自主控制方式,机器人自主导航,采集环境、目标图像信息,传输至控制台。控制台依此进行决策,决定机器人运动控制,最终完成探测、搜索目标等功能,保证了搜索区域的覆盖,实现了有效、快速的探测、搜索功能。
[1] 臧申俊. 基于群体智能的自主机器人设计[J]. 微型电脑应用, 2010 (5).
[2] 董晓坡,王绪本.救援机器人的发展及其在灾害救援中的应用[J].防灾减灾工程学报,2007.27(1):112-117.
[3] 张静等.基于SRV1平台的多机器人搜索研究[J].天津理工大学学报,2011(4):50-53.
[4] 尹建芹等.面向病房巡视的服务机器人目标搜寻[J].机器人,2011(5):570-578.
[5] 唐红丽,谢晓尧.救援环境下基于遥操作的机器人控制系统研究[J].贵州大学学报(自然科学版),2011(1):84-87.
[6] 杨进.应用AVR开发智能移动机器人的控制系统[J].微型电脑应用,2010,26(006): 1-3.
The Design and Research of Wheeled Robot for Target Detection
Yan Xijun,Zhao Guangchen
(College of Computer and Information Engineering, Hohai University, Nanjing 210098, China)
In order to provide technical services for disaster prevention, a robot is designed to search and rescue with embedded system, wireless transmission and image processing technology. The robot and hand-held terminal are designed with ARM 11 MCU-LM3S9B96. The robot collects the image by the camera, then compresses it and transmits it to the hand-held terminal by wifi; the hand-held displays the image by TFT LCD and sends controlling commands to the robot by wifi; the robot and camera run by the commands. The experiment results show that the image collected is clear, the commands can be executed timely and reliably, and the target detection and search can be completed.
Robot; Target Detection; Wireless Communication; Image Acquisition
TP393
A
2014.04.20)
国家自然科学基金(61273170)
严锡君(1963-),河海大学,副教授,博士,研究方向:无线传感器网络,嵌入式系统,南京,210098
赵光辰(1991-),河海大学,硕士研究生,研究方向:嵌入式系统,南京,210098
1007-757X(2014)08-0004-04
猜你喜欢
无线互联科技(2021年4期)2021-04-21
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
通信技术(2018年11期)2018-11-07
智能计算机与应用(2018年6期)2018-10-31
铁道通信信号(2018年4期)2018-06-06
时代英语·高二(2017年4期)2017-08-11