旋转加速度计重力梯度仪前放电路的分析与设计
2014-07-20 05:47:57蔡体菁
中国惯性技术学报 2014年3期
丁 昊,蔡体菁
(东南大学 仪器科学与工程学院,南京 210096)
旋转加速度计重力梯度仪前放电路的分析与设计
丁 昊,蔡体菁
(东南大学 仪器科学与工程学院,南京 210096)
根据旋转加速度计重力梯度仪的测量原理,其前放电路可以分为电流放大、求和运算、求差运算和带通滤波四个功能部分。首先推导了将电路输出噪声折算到重力梯度仪输入端的计算方法;其次分析了前放电路是电路噪声的主要来源,并以低噪声为前放电路的首要设计目标,研究了前放电路增益和运放的噪声指标之间的关系,比较了10-8~10-11g各个精度级别的加速度计对电路增益和运放噪声指标的最低需求。最后通过对研制的前放电路的试验测量证明了分析的合理性。
重力梯度仪;旋转加速度计;噪声分析;运算放大器;电路设计
作为地球物理研究、航空/航海资源勘探和辅助导航等领域的新兴技术手段,重力梯度测量技术受到越来越广泛的关注。近年来,以全张量型的FTG和部分张量型的FALCON这两种航空重力梯度仪为代表,重力梯度测量已经在相关领域展现出良好的性能[1-2]。虽然两者的性能指标不同,但技术方案都源自上世纪七十年代美国Bell Aerospace Textron开发的旋转加速度计式重力梯度仪的相关技术[3]。相比其它正在研发中的如超导重力梯度仪、冷原子重力梯度仪等,旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座的重力梯度测量仪器。
旋转加速度计重力梯度仪是将4只加速度计对称安装在旋转圆盘上,加速度计的敏感轴指向圆盘的切线方向。由于相对的两只加速度计的指向相反,所以其输出信号之和可以抑制垂直于圆盘转轴的线性加速度,而将两对输出信号之和再相减,就可以抑制绕圆盘转轴的旋转加速度。相加减之后的输出信号包含有调制在旋转频率上的圆盘中心点处的重力梯度分量。
为了分辨微弱的重力梯度变化,对重力梯度仪所用的加速度计的精度需求高达 10-11g,因此对与之匹配的前放电路系统性能要求更高[4]。特别是重力梯度仪的总体噪声性能决定了在实验室环境下其所能达到的极限性能,而电路系统的固有噪声是重力梯度仪总体噪声的主要部分。因此,必须要尽可能地降低电路系统的噪声,提高信噪比,使电路对信号的分辨能力与加速度计的高精度输出相匹配。根据文献[5],全张量型的 FTG重力梯度仪的固有噪声约为(1E=10-9s-2),而部分张量型的FALCON重力梯度仪的固有噪声约为。
近些年,国内学者和研究机构已经从原理及误差分析、关键器件研发等方面对旋转加速度计重力梯度仪进行了不断的探索[6-9]。本文分析了重力梯度仪前放电路的主要噪声来源和计算方法,以低噪声为设计目标,提出了对运放噪声指标的设计需求,研制出低噪声放大电路。
1 重力梯度仪前放电路的组成
旋转加速度计重力梯度仪的前放电路结构如图1所示,按照功能可以分为电流放大、求和运算、求差运算和带通滤波四个部分。

图1 重力梯度仪的前放电路组成结构Fig.1 Schematic diagram of the fore-end circuit
具体而言,4只加速度计的输出信号首先分别经过电流放大器放大成为电压信号,接着相对放置的两对加速度计的输出进入加法器进行求和运算,然后经过求和后的两个信号再进入减法器进行求差运算,最后通过带通滤波器成为重力梯度仪的输出信号。
由于重力梯度仪中使用的高精度加速度计多为电流输出型,为了后级运算和数据采集需要,必须将电流放大成电压信号。同时系统的总体增益主要由该级电路完成。图2(a)是重力梯度仪中的单路基于低噪声运放的电流放大电路原理示意图,其中加速度计Acc的标度因数为K,等效输出电阻为Rs,等效输出电容、连接线缆的寄生电容以及运放的输入电容之和为Cs,电路的反馈电阻和反馈电容分别记为Rf和Cf。
当半径为r的圆盘水平放置于xoy平面上时,根据旋转加速度计重力梯度仪的测量原理和图1所示电路结构,系统的输入输出传递函数为:
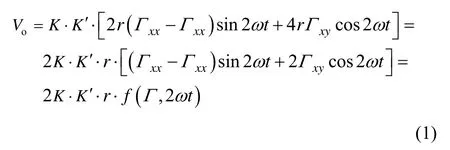
其中,K′是电路系统的总增益,如果求和运算、求差运算和带通滤波均为单位增益,那么总增益K′等于第一级电流放大电路的增益,即代表被调制到2倍圆盘旋转频率上的圆盘中心处的重力梯度信号。
2 噪声分析与电路设计
2.1 噪声源及其等效输出
相比求和运算、求差运算以及带通滤波等部分,位于整个前放电路第一级的电流放大部分具有很高的增益。根据噪声分析的相关理论,该级电路的噪声构成了整个系统噪声的主要成分,其它部分对总噪声的贡献可以忽略不计[10]。因此,只有降低电流放大电路的噪声,才会提高整个电路系统的噪声性能。
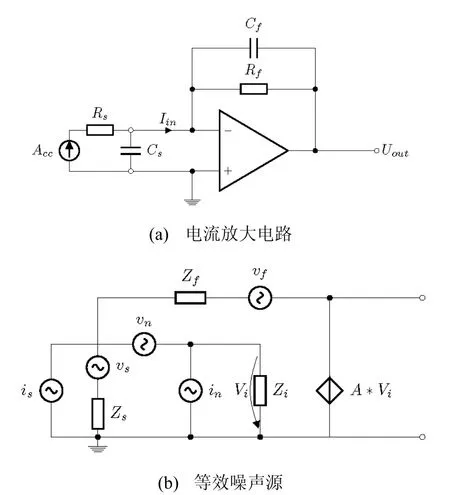
图2 电流放大电路及其等效噪声源Fig.2 Schematic of current amplifier (a) &noise sources (b)
如图2(b)所示,电流放大电路中的噪声源包括运放的电流噪声in、运放的电压噪声vn、反馈电阻Rf的热噪声vf、源电阻Rs的热噪声vs、加速度计表头电路(不含源电阻热噪声)的输出电流信号噪声is。其中,Zs代表Rs和Cs并联成的源阻抗,Zf代表Rf和Cf并联成的反馈阻抗;运放的输入阻抗、输入电压和开环增益分别是Zi、Vi和A。
根据叠加定理,各个噪声源引起的等效输出噪声为:


由于电路中的噪声源是非相关的,单路电流放大电路的输出噪声为:


根据式(1),折算到重力梯度仪输入端的噪声为:

2.2 低噪声电路设计
在重力梯度仪中,加速度计的精度在很大程度上决定了电流放大电路的增益,也就确定了反馈电阻Rf的阻值。运放的电流噪声in、电压噪声vn和反馈电阻Rf的热噪声vf与外界无关,构成了放大电路本底噪声。只要运放引起的输出噪声不超过vf引起的输出噪声,那么电路的噪声性能在理论上就能达到最优。
在不同增益条件下,放大电路对运放的噪声指标有不同的需求。图3显示了输出噪声与增益之间的关系。当电路增益较小时,反馈电阻热噪声vf引起的输出噪声vno3超过运放自身引起的输出噪声,构成电路总噪声的主要成分。当反馈电阻Rf的阻值提高,电路增益变大时,运放电压噪声vn引起的输出噪声vno2会急剧增大,上升为电路总输出噪声的主要成分。

图3 运放引起的输出噪声与增益之间的关系Fig.3 The op-amp output noise vs.circuit gain
因此,重力梯度仪前放电路低噪声设计的关键在于电流放大电路的增益与运放的噪声指标之间的合理匹配,即运放的电流噪声指标和电压噪声指标范围满足:

其中fH和fL是工作频率的上下限。

表1 不同精度加速度计对于运放噪声指标的需求Tab.1 The requirements to op-amp specifications with varying precision of accelerometer
为了符合式(10)提出的低噪声设计目标,表1列出了针对10-8~10-11g各个精度级别的加速度计,电流放大电路对运放的噪声指标的需求。加速度计的精度越高,所需的电路增益就越大,对运放的电流噪声指标和电压噪声指标要求就越严苛。
3 实验测试
以上述分析为基础,研制了重力梯度仪前放电路。图4是对前放电路进行噪声测试的连接示意图。为了隔离外界环境的电磁干扰,前放电路与供电电池一起被放置在屏蔽外壳内,并与4只加速度计一起安装在旋转圆盘(图中未示出)上。加速度计的4路输出信号通过前放电路进行放大、加减运算和带通滤波,输出的信号通过转台滑环接入安捷伦 35670A动态信号分析仪中,以测量噪声指标。

图4 噪声测试连接示意图Fig.4 Block diagram of noise measuring

图5 输出信号频谱Fig.5 The frequency spectrum of output signal
图5是测试得到的前放电路的输出信号频谱,其中总输出噪声有效值(rms)约为1 mV。根据式(9)计算,折算到重力梯度仪输入端的噪声约为。
4 结 论
本文从旋转加速度计重力梯度仪电路的噪声源入手,分析了各噪声源对总输出噪声的贡献,推导了折算到重力梯度仪输入端的噪声计算方法,给出了10-8~10-11g各精度级别的加速度计对运放噪声指标的最低需求。研制的旋转加速度计重力梯度仪低噪声测量电路,重力梯度仪输入端的噪声约为。
(References):
[1]DiFrancesco D,Grierson A,Kaputa D,et al.Gravity gradiometer systems–advances and challenges[J].Geophysical Prospecting,2009,57(4):615-623.
[2]DiFrancesco D,Meyer T,Christensen A,et al.Gravity gradiometry–today and tomorrow[C]//11th SAGA Biennial Technical Meeting and Exhibition.2009.
[3]Metzger E H.Recent gravity gradiometer developments[C]//AIAA Guidance and Control Specialist Conference.Hollywood,California,1977,1801:306-315.
[4]涂良成,刘金全,王志伟,等.旋转重力梯度仪的加速度计动态调节方法与需求分析[J].中国惯性技术学报,2011,19(2):131-135.TU Liang-cheng,LIU Jin-quan,WANG Zhi-wei,et al.Methods and requirements of dynamic compensation between accelerometers in rotating gravity gradiometer[J].Journal of Chinese Inertial Technology,2011,19(2):131-135.
[5]Dransfield M H,Christensen A N.Performance of airborne gravity gradiometers[J].The Leading Edge,2013,32(8):908-922.
[6]蔡体菁,周百令.重力梯度仪的现状和前景[J].中国惯性技术学报,1999,7(1):39-42.CAI Ti-jing,ZHOU Bai-ling.Status and prospects of gravity gradiometers[J].Journal of Chinese Inertial Technology,1999,7(1):39-42.
[7]刘润,蔡体菁,丁昊.高精度石英挠性加速度计闭环系统的设计与分析[J].东南大学学报:自然科学版,2010,40(2):311-315.LIU Run,CAI Ti-jing,DING Hao.Design and analysis of closed-1oop system of high resolution flexure pendulum accelerometer[J].Journal of Southeast University:Natural Science Edition,2010,40(2):311-315.
[8]杨功流,刘洋希,李晓平.重力梯度仪加速度计控制回路分析与设计[J].中国惯性技术学报,2009,17(2):145-147.YANG Gong-liu,LIU Yang-xi,LI Xiao-ping.Analysis and design on control loops of gravity gradiometer accelerometer[J].Journal of Chinese Inertial Technology,2009,17(2):145-147.
[9]李海兵,蔡体菁.旋转加速度计重力梯度仪误差分析[J].中国惯性技术学报,2009,17(5): 525-528.LI Hai-bing,CAI Ti-jing.Error analysis on gravity gradiometer of rotating accelerometer[J].Journal of Chinese Inertial Technology,2009,17(5):525-528.
[10]Kay A.Operational amplifier noise:techniques and tips for analyzing and reducing noise[M].Elsevier,2012.
Analysis and design of preamplifier circuits for gravity gradiometer of rotating accelerometer
DING Hao,CAI Ti-jing
(School of Instrument Science &Engineering,Southeast University,Nanjing 210096,China)
According to its working principle,the fore-end circuit in gravity gradiometer of rotating accelerometer can be divided into for four parts which are current amplifiers,adders,substracters and band-pass filters.In this paper,the method of evaluating the RTI (refer to input) noise of the gradiometer circuit is reduced.As the main noise source of the circuit system,the ultimate goal of the fore-end circuit design is lower noise.Then the relationship between the circuit gain and the op-amp noise specifications are studied to compare the minimum requirements with the accelerometer precision varying from 10-8gto 10-11g.The measure results of the developed circuit prove the rationality of the analysis.
gravity gradiometer;rotating accelerometer;noise analysis;operational amplifier;circuit design
U666.1
A
1005-6734(2014)03-0400-04
10.13695/j.cnki.12-1222/o3.2014.03.023
2014-02-26;
2014-04-15
“十二五”863主题项目(2011AA060501)
丁昊(1979—),男,博士研究生,从事精密仪器研究。E-mail:dinghao32901@126.com
联 系 人:蔡体菁(1961—),男,教授,博士生导师。E-mail:caitij@seu.edu.cn
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22 07:44:50
中国特种设备安全(2021年5期)2021-11-06 05:09:08
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
中国惯性技术学报(2016年4期)2016-04-19 09:08:38
测绘科学与工程(2016年6期)2016-04-17 06:51:23
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年3期)2016-03-26 07:13:14
数字通信世界(2015年10期)2015-12-21 12:22:54
导航定位与授时(2014年2期)2014-04-27 13:41:11