
融合边缘与区域信息的水平集分割算法
2014-07-19 15:10李惠光孙思佳
计算机工程与应用 2014年18期
李惠光,孙思佳
燕山大学电气工程学院,河北秦皇岛 066004
融合边缘与区域信息的水平集分割算法
李惠光,孙思佳
燕山大学电气工程学院,河北秦皇岛 066004
1 引言
主动轮廓模型在图像分割领域受到了广泛关注并有着重要的应用,主动轮廓模型大体可分为基于边缘的模型[1-3]和基于区域的模型[4-6]两大类。基于边缘的模型初始轮廓在曲线内力和外部约束力的共同作用下向目标边界演化,有着较强的抗噪能力;基于区域的模型主要依靠区域信息来控制曲线的运动。
GAC模型[7]是一种基于边缘的主动轮廓模型,它将图像分割转换为寻找加权弧长最小值问题,能量函数向最小值方向演化,达到最小时分割结束,但在分割低对比度或边缘模糊图像时,容易产生边界泄露。Chan和Vese提出了一种基于区域的C-V模型[4],演化并不依赖图像梯度,即使是边缘模糊的图像也能得到很好的分割结果,并且对初始轮廓不敏感,但该模型计算量很大。Li等人提出的LBF模型[5]利用图像局部信息来控制初始轮廓的演化,该模型能准确分割灰度不均匀图像,但由于仅依靠区域信息,模型对轮廓线位置和噪声敏感。Zhang等人提出的LIF模型[6]利用图像的局部灰度拟合来构造能量函数,在计算量减少的情况下,达到了与LBF模型同样的效果,但依旧对初始轮廓和噪声敏感。
利用LIF模型和GAC模型的各自优点,本文提出了一种融合边缘与区域的水平集模型,它根据图像的灰度信息,自主调节融合模型中LIF模型和GAC模型权值[8]的大小。在背景区域将GAC模型权值设置较大,在边界区域将LIF模型权值设置较大。充分利用了两种模型的优点,同时又克服了它们自身的缺陷。
2 LIF算法模型和GAC算法模型
2.1 LIF算法模型
LIF模型是Zhang等人提出的基于区域的活动轮廓模型,该模型较好地解决了灰度不均匀图像的分割问题。LIF模型首先定义一个如式(1)的局部拟合图像:

其中m1和m2分别是一局部窗口与轮廓内外交集的像素均值,定义如下:

其中Wk(x)是矩形高斯窗口函数,表示以x为中心的窗口内像素,用来提取图像的局部信息。窗口的大小由尺度参数σ决定,如果σ选得过小窗口尺寸就小,则LIF模型对噪声和初始轮廓都很敏感;反之则窗口覆盖的区域较大,m1和m2接近于区域灰度均值,此时对初始轮廓的位置有较强的鲁棒性。利用拟合图像与原始图像的差异,m1和m2可由式(3)计算得到:
由于高斯窗口有局部性,初始轮廓演化的主要力量来自于图像局部灰度值,所以LIF模型能在灰度不均匀条件下正确分割出目标轮廓。但窗口的局部性容易使能量函数演化至局部极小。
2.2 GAC算法模型
在GAC模型中曲线演化的目标是最小化如式(6)的能量泛函:

式(8)表明在GAC模型中,曲线C的运动受到来自曲线曲率运动和图像梯度的影响,当曲线到达目标边界时就形成稳定的分割。但是,当目标边界有较深的凹陷区域时,演化曲线可能会陷入局部极小值点。为了增强曲线在深凹陷区域的分割能力,将上式修改为:

其中N为指向轮廓线内的法向量,α为一常数,α·N为气球力用来越过局部极小点。应用变分法得到GAC模型的梯度下降流方程如式(10):

当曲线演化到目标边缘附近时,停止函数g趋近于零,因此初始轮廓会停留在目标边界处。但初始曲线只能向一个方向运动,要么朝向轮廓内,要么朝向轮廓外。为了准确分割出目标,这就要求初始曲线要包围整个目标,或在目标物体内部。移动方向由常数α的正负来控制,这使得GAC模型缺乏对演化方向的控制能力。此外,停止函数收敛于零的速度过慢,在弱边界处演化曲线可能会越过目标边界,导致边界泄露。测地线模型是一种基于边缘的主动轮廓模型,由于模型的非凸性,其解只能是局部极小值,所以对初始轮廓位置十分敏感,由于驱动轮廓演化的外力是基于梯度的以及它的弱二向性,在目标的弱边缘处,测地线模型将失去作用。
3 本文融合算法
3.1 算法介绍
根据GAC模型和LIF模型在分割中各自的优缺点,本文提出一种融合算法,它根据图像的自身信息自适应地改变两种模型的权值大小。在灰度均匀区域将GAC模型的权值设置为远大于LIF模型的权值,以提高曲线的演化速度,并且避免陷入局部极值点。在目标轮廓附近设置较大的LIF模型的权值,让LIF模型主导曲线的演化,从而在灰度不均匀区域获得较好的分割效果。
3.2 算法实现
首先,在LIF模型中添加Li模型中的惩罚项和曲线长度项[5],得到如式(11)的改进LIF模型:
加入惩罚项的作用是纠正水平集函数和符号距离函数的误差,让演化曲线一直在符号距离函数附近,从而避免重新初始化水平集的步骤,提高演化效率。长度项的引入既可以平滑水平集轮廓,又避免出现过分割现象。最小化式(11)的能量泛函得到它的梯度下降流方程为:
在改进的LIF模型和GAC模型基础上定义如式(13)的融合模型:

其中d是大于零的常数,用来调整权系数的下降速度;σ(I)是图像I中各像素邻域的灰度标准差,它与邻域内的灰度均匀程度成反比。权系数控制着区域能量和边缘能量在模型中所占的比重,当分割灰度均匀图像时,常数d可以取值较大,此时边缘能量在整个演化模型中起主导作用,轮廓线能快速越过灰度均匀的背景区域,并能避免区域能量使模型陷入局部极小;当分割灰度不均匀图像时,分割结果的准确度依赖于局部能量,常数d要取较小的值,这样区域能量在整个演化模型中起主导作用,轮廓线能准确停止在目标边界上。因此,常数d由图像灰度均匀性决定。
4 实验结果与分析
为了验证本文算法的可行性与有效性,本章将给出本文模型与LIF模型、GAC模型对不同图像的实验对比,比较它们的迭代次数和分割结果,结果表明本文方法可以减少迭代次数,提高效率。
4.1 与LIF模型的比较
图1是本文模型与LIF模型对人造图像的分割结果,其参数设置为:ΔtLIF=0.1,σ=4,μ=1,ε=1,ς=0.55,ν=0.000 5×255×255,ΔtGAC=10,d=10。

图1 与LIF模型对比结果
图1(a)给出了初始轮廓,本文算法在迭代3次后就得到理想的结果如图1(b)所示,图1(c)是LIF模型迭代70次后的分割结果。由于LIF模型只包含图像的局部信息,没有加入边缘信息,所以在曲线演化过程中没有收敛到理想的边界而是最终陷入局部极小并且有过分割现象发生。因为图1中背景和待分割区域的灰度相对较均匀,本文模型在初始轮廓距目标边界较远时主要依靠模型中的全局边界项驱动轮廓到目标边界附近,而后,由模型中局部项作为主要驱动项,驱动边界收敛到待分割目标。因此得到了较准确的分割结果。
图2也是本文模型与LIF模型对人造图像的分割结果的对比,其参数设置为:ΔtLIF=0.055,σ=10,μ=1,ε=1,ς=0.5,ν=0.000 5×255×255,ΔtGAC=1,d=10。图2(a)给出了初始轮廓,图2(b)、图2(c)分别是本文算法和LIF算法的分割结果。由于本文算法融合了区域和边缘信息,仅需迭代3次就能得到正确结果,速度明显比LIF算法快。LIF算法虽然也分割出了目标轮廓,但由于同时在目标背景处陷入局部极小,在迭代100次后仍无法得到理想结果。
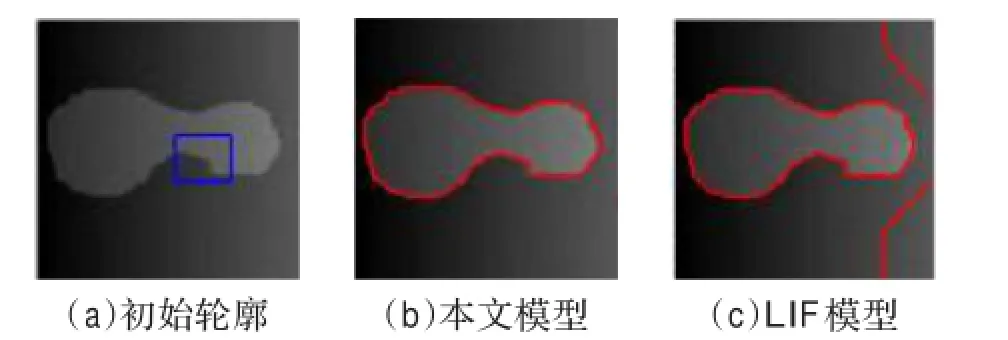
图2 与LIF模型对比结果
4.2 与GAC模型的比较
图3是本文模型与GAC模型对图像的分割结果的对比图,其参数设置为:ΔtLIF=0.025,σ=10,μ=1,ε=3,ς=0.5,ν=0.000 5×255×255,ΔtGAC=1,d=10。初始轮廓由图3(a)给出,图3(b)是本文算法迭代1次后的结果,图3(c)是GAC算法迭代1 000次后的结果。由于初始轮廓不在目标物体的内部或外部,而GAC模型又只能朝一个方向演化,所以轮廓不能停留在目标物体边界处。并且由于GAC模型仅包含图像的边缘信息,在图像的弱边界处还出现了边界泄露。而本文算法在目标边缘处增加局部区域信息所占比重,因此,能够得到较好的分割效果。
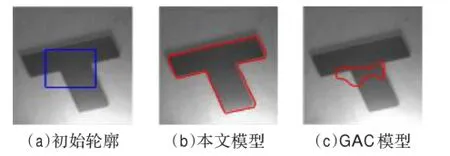
图3 与GAC模型对比结果
5 结束语
本文提出了一种结合GAC模型和LIF模型优点的融合算法,算法中的权值根据图像的灰度信息自适应地改变。在不同的区域分别以GAC模型、LIF模型作为主要的水平集演化力量。充分发挥了GAC模型在灰度均匀区域分割速度快,以及LIF模型在边界附近能准确分割出目标的弱边界的优势,同时又避免了各自算法的不足。与GAC模型相比本文模型对初始轮廓位置不敏感,即使轮廓线没有包围目标物体时,也能用很少的迭代次数准确分割出目标。与LIF模型相比本文模型加入了图像的边缘信息,从而避免了因只有区域信息而陷入局部极值。需要说明的是,本文模型对初始轮廓的位置有一定限制,如何解决对不同图像的初始轮廓不敏感问题,还有待于进一步深入研究。
[1]Caselles V,Catte F,Coll F,et al.A geometric model for active cotours[J].Numerishe Mathematik,1993,66(1):1-31.
[2]Li Chunming,Xu Chenyang,Konwar K M,et al.Fast distance image segmentation[C]//Proc of the Int’1 Conf on Control,Automation,Robotics and Vision.Singapore:[s.n.],2006:1-7.
[3]何传江,李梦,詹毅.用于图像分割的自适应距离保持水平集演化[J].软件学报,2008,19(12):3161-3169.
[4]Chan T F,Vese L A.Active contours without edges[J]. IEEE Trans on Image Processing,2001,10(2):266-277.
[5]Li Chunming,Kao chiuyen,Gore J C,et al.Minimization of region-scalable fitting energy for image segmentation[J]. IEEE Trans on Image Processing,2008,17(10):1940-1949.
[6]Zhang K,Song H,Zhang L.Active contours driven by local image fitting energy[J].Pattern Recognition,2010,43(4):1199-1206.
[7]Caselles V,Kimmel R,Sapiro G.Geodesic active contours[J]. International Journal of Computer Vision,1997,22(1):61-79.
[8]林亚忠,顾金库,郝刚.一种新的自适应水平集算法[J].计算机工程,2011,13(7):216-218.
LI Huiguang,SUN Sijia
College of Electrical Engineering,Yanshan University,Qinhuangdao,Hebei 066004,China
As the Geodesic Active Contour(GAC)model brings boundary leakage easily and sensitive to the initialization,and Local Image Fitting(LIF)model traps into local minimums easily,a level set model based on edge and region information is proposed,which can automatically adjust the proportion of GAC and LIF in the fusing model by setting weight.Experiment results demonstrate the method is superior to GAC and LIF model both in terms of speed and effect.
Geodesic Active Contour(GAC)model;Local Image Fitting(LIF)model;level set algorithm;intensity inhomogeneity
针对测地线主动轮廓(GAC)模型容易产生边界泄露且对初始位置敏感及局部图像拟合(LIF)模型容易陷入局部极小的问题,提出融合边缘与区域模型的水平集算法。通过设置权值,该算法能自适应地调整GAC模型和LIF模型在融合算法中所占的比例。对不同图像的实验结果表明该算法的迭代收敛速度比GAC模型和LIF模型要快,分割效果明显优于GAC模型和LIF模型。
测地线主动轮廓(GAC)模型;局部图像拟合(LIF)模型;水平集算法;灰度不均匀
A
TP391
10.3778/j.issn.1002-8331.1210-0197
LI Huiguang,SUN Sijia.Level set algorithm of combining edge and region information.Computer Engineering and Applications,2014,50(18):175-177.
李惠光(1947—),男,教授,研究领域为图像处理,视觉伺服;孙思佳(1984—),男,硕士研究生,研究领域为图像处理。E-mail:ydlhg@163.com
2012-10-18
2012-12-04
1002-8331(2014)18-0175-03
CNKI网络优先出版:2013-01-11,http://www.cnki.net/kcms/detail/11.2127.TP.20130111.0953.017.html
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
儿童时代·幸福宝宝(2021年11期)2021-12-21
高技术通讯(2021年3期)2021-06-09
装备制造技术(2020年1期)2020-12-25
现代装饰(2020年4期)2020-05-20
制造技术与机床(2019年11期)2019-12-04
证券法律评论(2018年0期)2018-08-31
中国交通信息化(2017年4期)2017-06-06
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
