基于感性工程学在机械臂设计中的应用*
2014-07-13 07:42王克武
制造技术与机床 2014年8期
王克武
(连云港职业技术学院,江苏 连云港222006)
由于生活方式越来越多样化,人们对产品功能和质量提出了更高的要求,同时还要求产品更加多样化。那些能够影响人们使用新产品的精神和情学感满意度的美学因素在购买决策中变得越来越重要。感性工程学(kansei engineering)是一种将精神和情感等主观因素纳入常规产品设计技术。它从美学和情感需求角度出发,对产品的性能和质量之类的客观因素进行评价。
人有5种身体感官,即视觉、听觉、味觉、嗅觉和触觉,如图1所示。每种感官都与人的感性认识有关。与感性(kansei)最为接近的英文词组是主观态度(subjective attribute)或美学因素(aesthetic factor)。“感性工程学”一词广为人知,且已全球通用。
广义上讲,感性工程学包括在人机工程学(ergonomics)领域内。产品的某些因素可以在使用中减轻人体疲劳,确保持久的舒适度;另外,产品的物理特性要“符合”人的尺度,人机工程学主要用来对这些因素进行评价。感性工程学需要考虑情感、精神满意度以及人体舒适度等方面,不仅要对广大客户日常使用的产品进行感性评价,而且还要对制造领域中的工业机器(如机床和工业机器人)进行感性评价,这样才能最大化工人的舒适度,最小化影响工人积极性的因素。进一步讲,感性评价对于产品制造支持体系的研究和发展也非常重要,它可以使产品研发、设计和制造中人的感性能力得到淋漓尽致的发挥。
1 感性工程学在机械臂设计中的应用
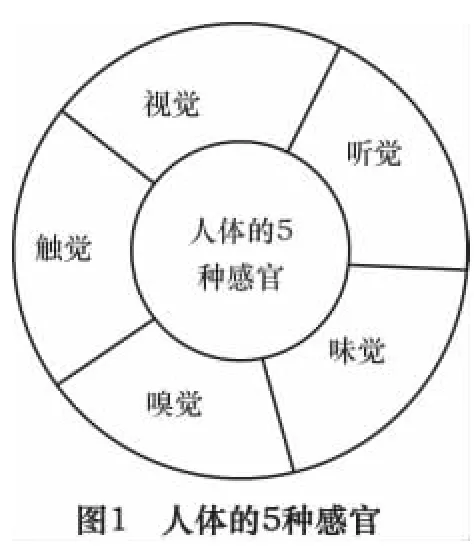
感性评价在产品色彩和外观上的应用最为广泛,但对于机器产品来说,用户的喜好和产品运行中的感性评价同样重要。图2所示为使用SD法的产品感性评价流程图,给出了一个感性评价流程示例,并在图3中列出了一个机械臂通过运动把一杯果汁递给消费者的示例,对这一过程进行了感性评价。
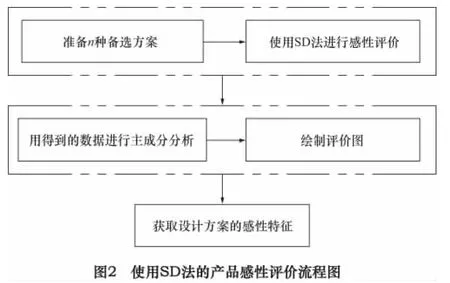
如图3所示,机械臂拿着一个杯子,并在A点把果汁倒进杯子,然后把杯子递给B点的消费者。评价这一运动过程中的感性因素。
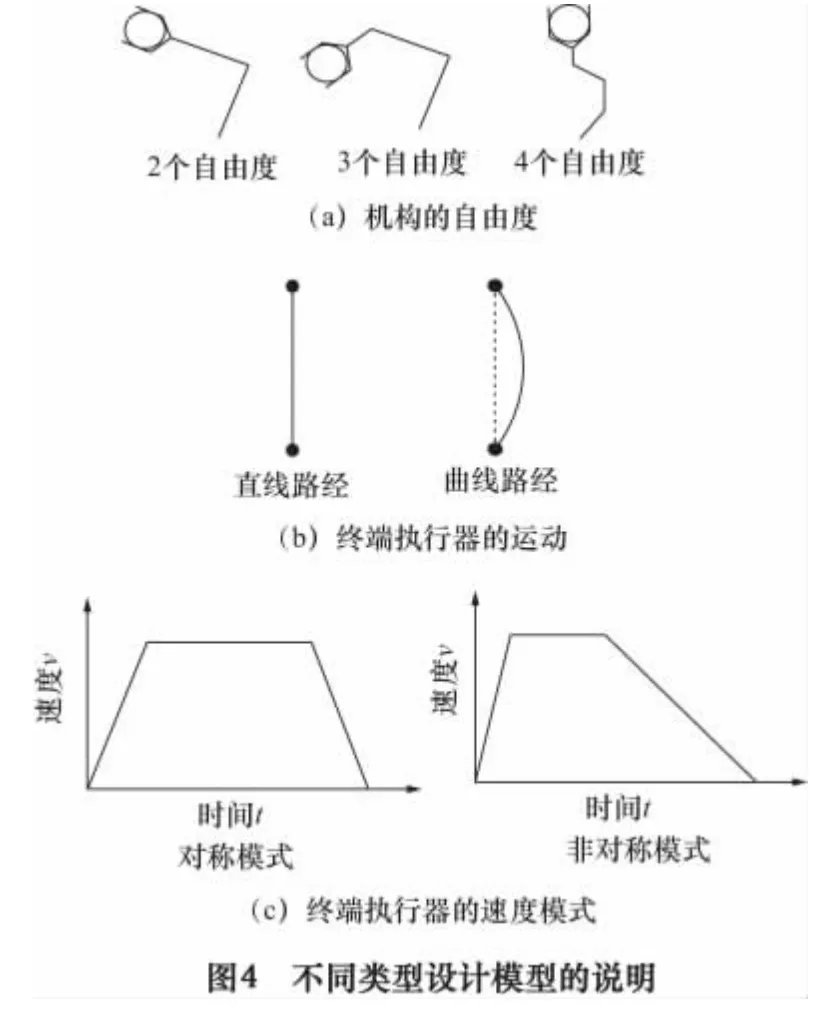
不同设计规范的组合可以得到不同类型的机械臂,图4所示为不同类型设计模型的说明。由于这些机构有3个或更多个自由度,增加了产品成本和操作的复杂性,并且造成了功能冗余,但如果这些机构产生出众的感性映像,这些设计或许值得付出更多成本。至于末端执行器(机械手)的运动形式,曲线运动的效率可能不如直线运动,但在感性方面优于直线运动。在匀速运动前后,手部执行器的不同加速度会产生不同的感性印象。通过组合不同的设计规范,可以得到以下10个备选产品设计方案:
①2个自由度,直线运动,对称运动模式。②2个自由度,直线运动,非对称运动模式。③2个自由度,曲线运动,对称运动模式。④2个自由度,曲线运动,非对称运动模式。⑤3个自由度,直线运动,对称运动模式。⑥3个自由度,直线运动,非对称运动模式。⑦3个自由度,曲线运动,对称运动模式。⑧3个自由度,曲线运动,非对称运动模式。⑨4个自由度,直线运动,对称运动模式。⑩4个自由度,直线运动,非对称运动模式。
该设计的目标是:良好的可操作性、最大限度地降低产品成本以及感性需求满意度。它要求该机械手在夏天递上冷饮,在冬天递上热饮时的运动能够产生较好的印象。受试人员,即那些正在考虑性购买该产品的客户在他们的个人电脑显示器上评价产品的感性特性,并说明他们对机器运动形式的喜好程度。
对产品设计感性知觉的定量评价一般较为困难,形容词词对(word pair)的语法差异法(semantic differential method)常用衡量人们对给定产品的感觉。语义差异法的具体实施方法如下:
①第1步:准备一组可以表达所要评估产品感性特征的形容词词对。
②第2步:受试人员对每个产品模式进行评价,然后给出每个形容词词对的定量评价结果。
③第3步:用得到的数据进行主成分分析(principal component.analysis),然后选出最能有效表达感性印象的词对,这样就可以做出一张定量表达每种产品模型的感性特征评估图。
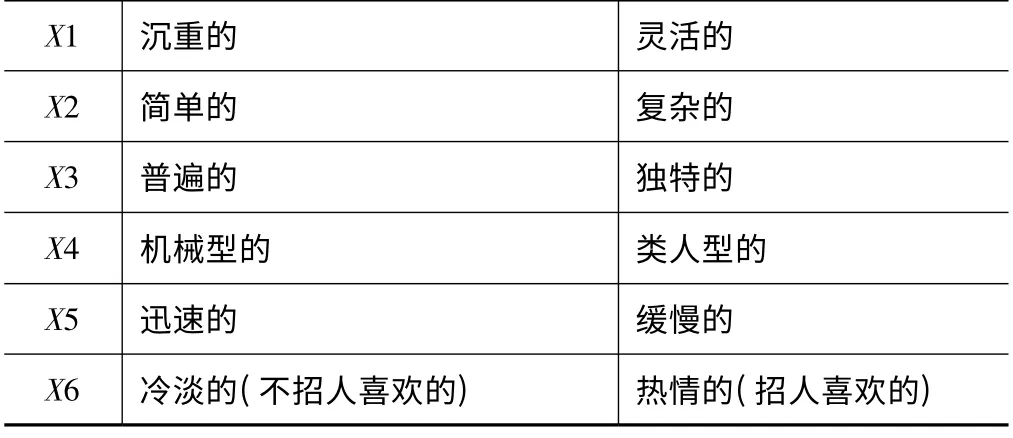
表1 6个用来评估机械臂运动感性印象的形容词词对
表1所示为6个用来评估机械臂运动感性印象的形容词词对。其中,左、右两列的评价词组可以分为5段,相应的度量值分别是-2、-1、0、1和2。2表示机械臂运动的感性印象与右列的形容词高度一致,而-2则表示机械臂运动的感性印象与左列的形容词高度一致,0则表示中立印象。每位受试人员根据屏幕上显示的每个机械手模型的运动形式和相应的词组,输入相应的评价值,并根据他们的感性知觉选出自己最为满意的模型。
用主成分分析法求得每一对形容词的数据。把所得的6种主要成分表示成Z1,Z2,…,Z6。表2所示为每个主成分的特征值和特征向量。特征值表示特征的差异,逐步变大的差异表示该主成分的重要性在逐渐增加。每个特征向量对应有一个感性形容词,表示为X1,X2,…,X6。特征值之和等于元素的总个数,此处为6。第一个主成分Z1的贡献率是60.6%[(3.636 33/6)×100%],第二个主成分Z2的贡献率是31.0%[(1.861 12/6)×100%],这两个主成分的贡献率总和是91.6%。由于第一个和第二个主成分在表达感性印象上的贡献率超过了90%,所以其他主成分可以忽略不计。因此,可以把Z1和Z2分别作为评价图的水平坐标轴和垂直坐标轴,如图5所示。
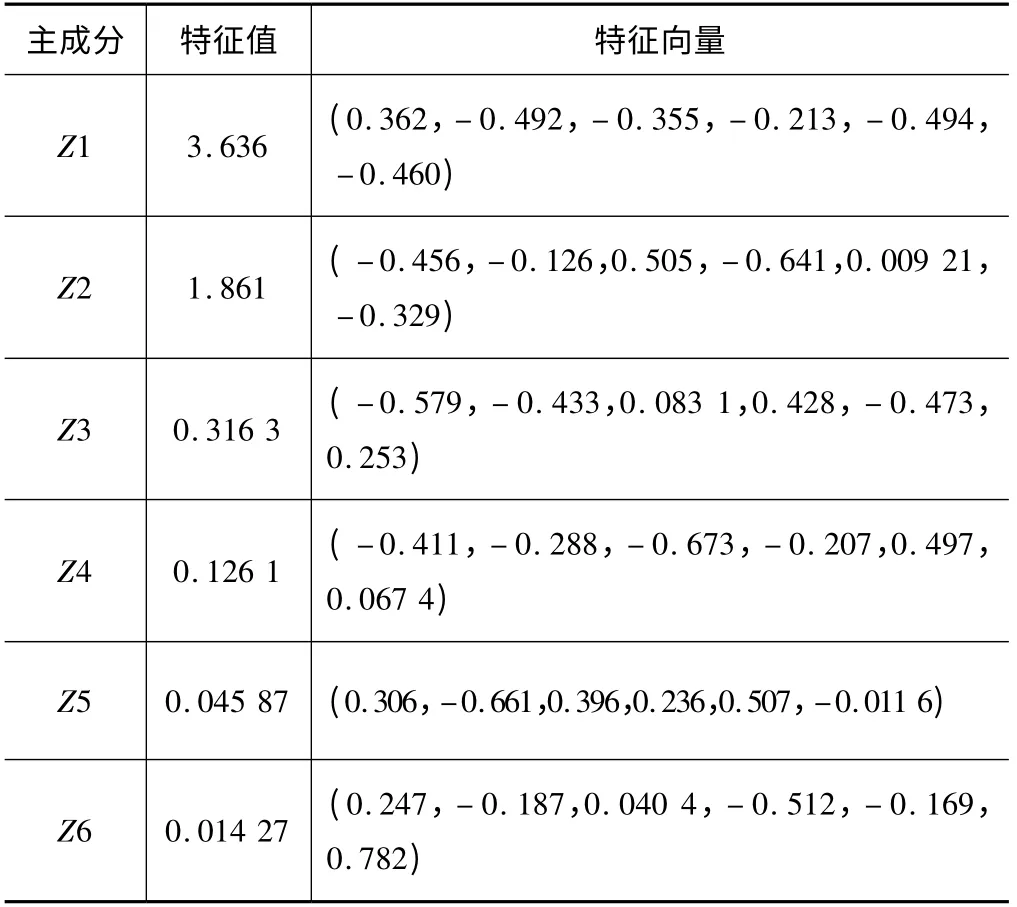
表2 每个主成分的特征值和特征向量
从表1和表2可以看出,在Z1的特征向量中,只有X1有正值,它表示灵活的感觉印象;同样,在Z2的特征向量中,X4负值最小(Z2轴主要表示从类人型到机械型的感觉范围)。然后根据每个产品模型的感觉印象将其定位在空间坐标系中,这样就创建了一张评价图。
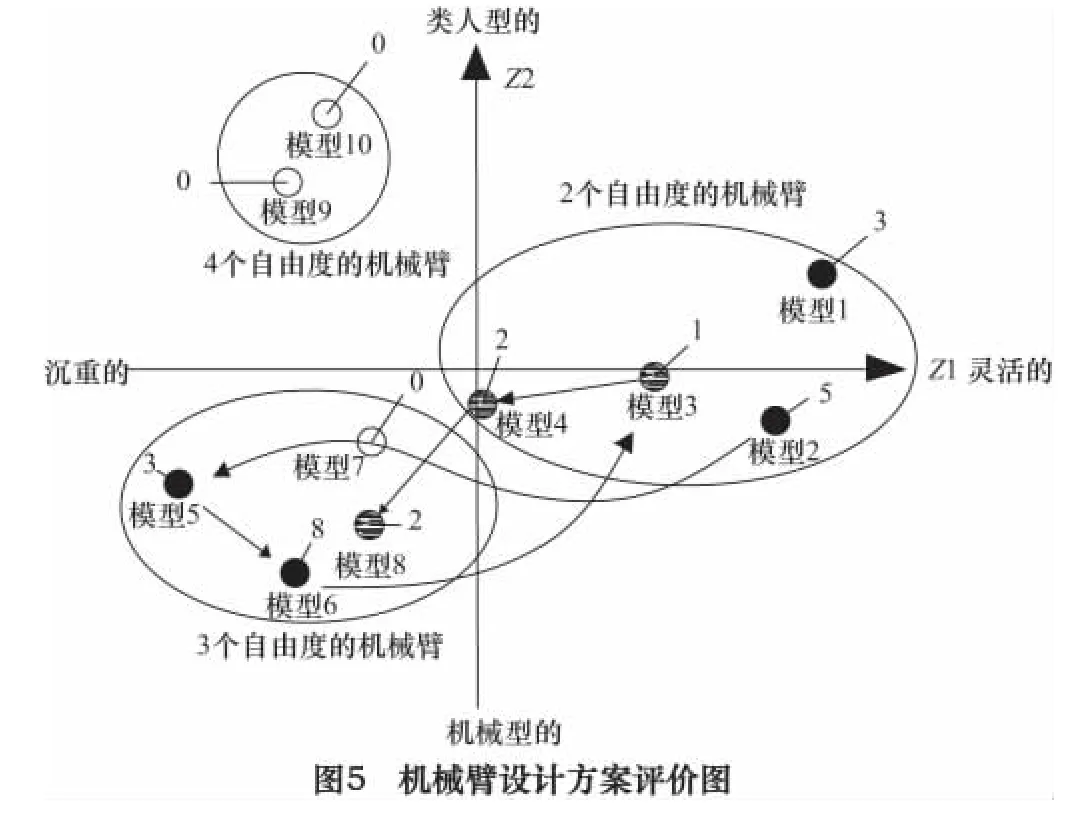
图5中的每个圆圈都对应一个产品模型。选票的数量是通过问卷调查得到的,它从感性角度出发,确定出了最好的设计方案。我们可以认为,选票的数量与产品模型的受欢迎程度成正比。在图5中,圆圈的亮暗表示所得选票数量的多少,较暗的圆圈表示选票较多;横轴表示机械臂运动的灵活水平,较大的正值表示灵敏度较高,较小的负值则表明受试人员觉得机械臂的运动比较笨重;纵轴上不断增加的正值表示类人型运动印象百分比的增加,不断变小的负值则表示机械型运动印象的增加。在这些图中,每种模型都有同样的自由度,可以归为一组,也就是说每个模型都有相同数量的手臂段,被一个大圆包围。有2个自由度的模型一般较为灵活,有3个自由度的模型一般较为机械,而有4个自由度的模型的运动就比较类似于人类的运动。通过这张评价图可以看出每个产品模型的感性程度和质量。
图5中的模型6得到了最多的选票,表明它的感性印象最好。这个产品模型是3个自由度的机械臂,它的起始加速度最大,终端执行器的运动为直线型。选票居于第二的是模型2。为了选出最好的方案,不仅要看选票数,还必须考虑设计方案的成本。在评价图上,沿着箭头指示的方向,产品成本逐步增加。两个模型之间箭头的宽度与成本差异的大小成正比。
把模型i的感性特征表示为Ei,成本表示为Ci。把得票最多、即最受欢迎的模型命名为S,把S的选票数量和成本分别表示为ES和CS。沿箭头方向,位于S之后的那些模型的成本高于模型S。出于长远考虑,把这些模型排除在选择范围之外。在模型S之前出现的那些模型,成本相对较低,与模型S有可比性。因此,同时考虑感性偏好水平和产品成本,在此基础上对方案进行评价,就可以选出最好的设计方案。
图6所示为模型6、5、2和模型6之前出现的模型1的选票数量和产品成本之间的关系。拟合模型1、2、6的虚线就是多目标优化问题的帕累托最优解曲线(pareto optimun solution line),它兼顾了最多选票数和最小成本这两个优化目标。由于模型5并不位于帕累托最优曲线上,所以将它排除在外。考虑虚线上各模型之间的权衡关系,就可以选出最好的模型。以上讨论基于一个事实基础,即客户和制造商协同评价产品的设计方案。
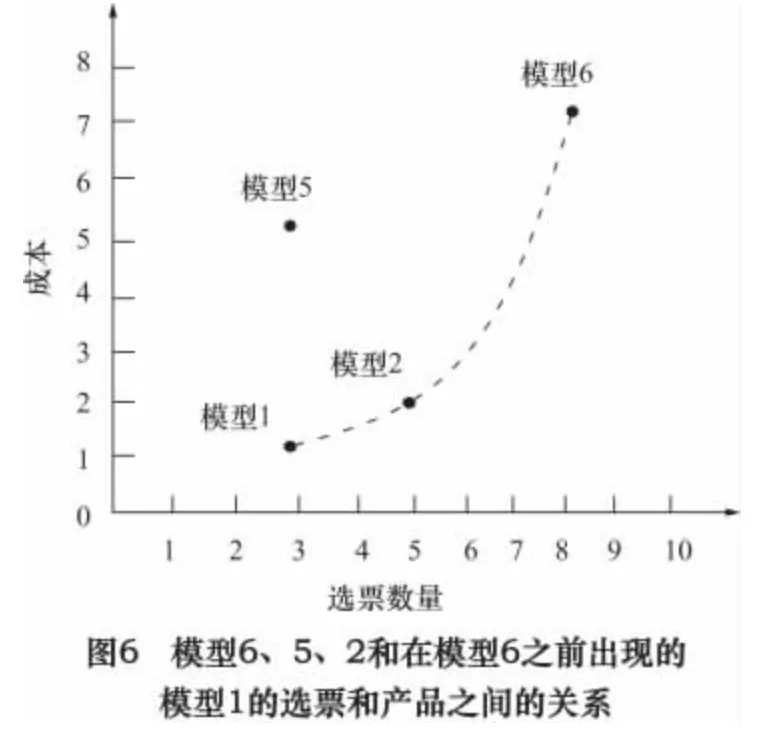
图6模型6、5、2和在模型6之前出现的模型1的选票和产品之间的关系将感性印象和其他常规属性综合考虑的产品设计正变得流行起来,制造商也无法忽视这一点。在这场为客户设计新颖独特产品的斗争中,在技术上对诸如静态位移、产品重量和动态性能这样的客观属性进行定量评估是可行的,但应该将这些内容与主观属性和产品成本限制条件等条件一起综合考虑。客观属性和主观属性通常是独立评价。如果产品的客观和主观属性没有任何关系,或者在改进产品的客观属性同时也会提升产品的主观属性,这种独立评价极为有效。然而,当产品的主观属性和客观属性发生冲突时,如设计一款汽车的车身,方案看起来很迷人,但如果要牺牲汽车的室内空间时,就需要同时评价主观属性和客观属性。
此处把工业机器人的模型作为示例,既需要对其静态位移、每级力量的最大振动位移、产品重量和负载能力等客观属性进行评价,还要考虑诸如外观之类的主观属性。设计变量是产品及其零部件的尺寸、整体外形和表面处理等。这样就可以构造出用来表达客观属性和主观属性的满意度。为了得到这5种设计变量和外观之间的关系,把每个设计变量分为3个等级,A、B和C,如表3所示。通过这些等级的组合,构造出产品模型的形状,并将其显示在计算机上。受测试人员对每个产品模型进行评价,并给出一个等级,范围是从1到10。表4所示为通过分类变量和评价值大小表示的备选设计方案。然后用数量化Ⅰ类理论(type I quantification theory)的多属性分析方法处理这些数据,这样就可以得到感性满意度函数u5。
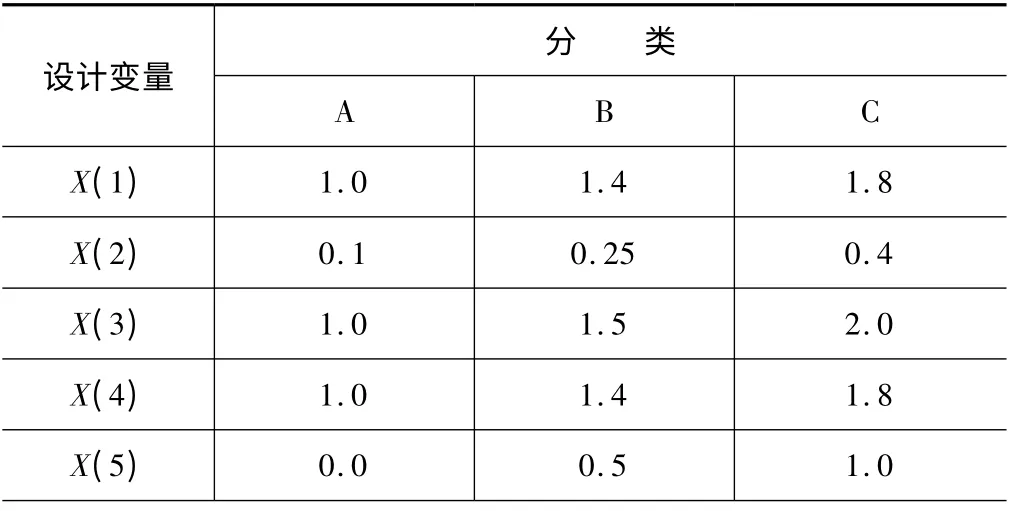
表3 设计变量的分类变量值
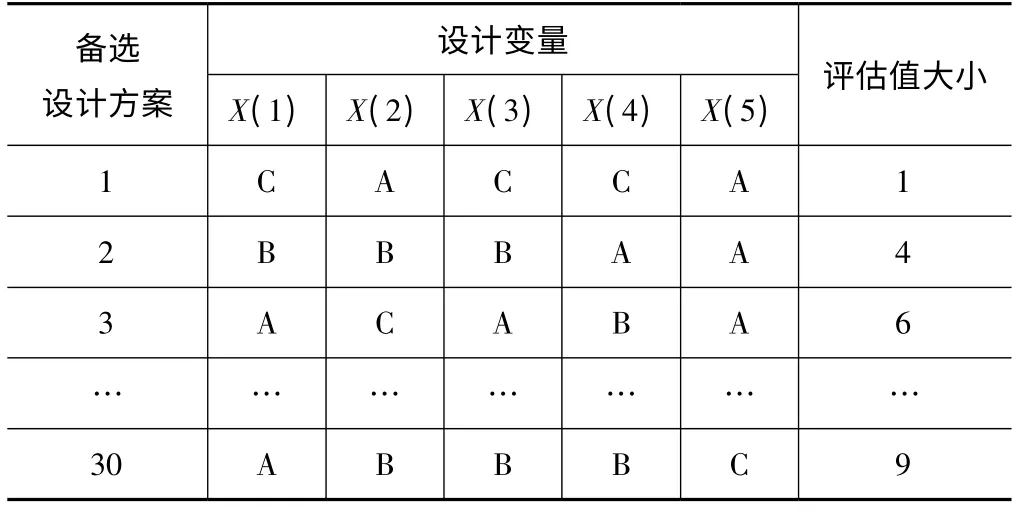
表4 通过分类变量和评价大小表示的备选设计方案
为了定义各属性的权重系数,需要受测人员对属性进行比较。在这个例子中,可得到以下权重系数:静态位移ω1=0.343 7、最大振动位移ω2=0.068 1、产品重量ω3=0.133 9、载荷量ω4=0.136 9、外观ω5=0.317 3。那么,对客观属性和主观属性进行综合评价的函数U0为:
如前所述,为了得到能让客户产生最高满意度的设计方案,必须综合考虑产品的客观属性和主观属性。有时人们会说,因为感性印像是主观的,所以整合感性印像的设计可能会不可靠。虽然表示人们主观评价的数据看起来比较分散,但还是有可能从中提取与产品设计相关的共同点或者共性的东西。如果产品设计的目标重点在于特定的客户群体,感性评价就可以为产品的设计决策提供强有力的支持。
2 结语
“感性工程学”是最近20多年来兴起的设计新方向、新学科之一。通过它可以将过去判定为难以量化、只能定性的、非理性无逻辑可言的感性反应,运用现代先进技术和手段,翻译成为新生代工学技术和产品。在机械臂设计实施过程中发现,感性问题通过逐层的分析,在产品和人之间构建一套完整价值判断系统,在此系统中只要建立起感性因素与定量物理量之间的关系,就能够保证设计进入良性运行,提高设计质量,为机械臂产品的研发和设计提供了一种新的思路,从而提高设计流程和方法的科学性。
[1]Nagamachi M.Technology implementing kansei in designing[J].Journal of Japan Society for Fuzzy Theory and Systems,1998,10(6):1063-1077.
[2]Nagamachi M.Kansei engineering:the implication and ap-plications to product development[c].Proc.of IEEE International Conference on Systems,Man.and Cybernetics,1999:273-278.
[3]李月恩,王震亚,李大可.感性工程学理论研究及产品开发应用[J].武汉理工大学学报,2010,32(6):168-172.
[4]费仁元,张慧慧编著.机器人机械设计和分析[M].北京工业大学出版社,1998.
[5]刘楚玉,王海林,陈荣,等.基于感性工学的产品设计与评价方法[J].包装工程,2012(10):90-94.
[6]倪受东,文巨峰,颜景平.质量平衡原理在机器人机械臂设计中的应用[J].制造业自动化,2001(10):42-43,47.
[7]马宁.基于感性工学的农业机械装备的设计研究[J].农机化研究,2010(9):133-136.
[8]倪受东,黄筱调,袁祖强.质量平衡原理在机械臂设计中的应用[J].南京工业大学学报,2003,25(3):66-68.
猜你喜欢
华声文萃(2022年6期)2022-07-05
文萃报·周五版(2022年16期)2022-04-28
山东纺织经济(2021年5期)2021-08-13
当代工人(2020年8期)2020-05-25
视野(2018年20期)2018-10-30
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
缤纷家居(2008年2期)2008-04-01