基于D-S证据理论的柴油机故障检测方法
2014-07-12 05:58宋振海潘兴隆
舰船科学技术 2014年6期
宋振海,潘兴隆,贺 国
(1.海军潜艇学院动力操纵系,山东青岛266042;2.海军工程大学 船舶与动力学院,湖北武汉430033)
基于D-S证据理论的柴油机故障检测方法
宋振海1,潘兴隆2,贺 国2
(1.海军潜艇学院动力操纵系,山东青岛266042;2.海军工程大学 船舶与动力学院,湖北武汉430033)
给出一种基于D-S证据理论的多传感器信息融合方法,并应用于某型船用柴油机故障检测中。首先,为克服人为因素和系统误差的干扰,在现场采集数据基础上,采用概率统计的方法来构造D-S证据理论的基本概率分配函数;然后,利用D-S证据理论对多传感器采集的信息进行融合;最后,将该方法应用于某型船用柴油机的故障检测中。实验结果表明,利用D-S证据理论解决了该型柴油机故障检测中多传感器信息融合问题,有效避免了人为因素的干扰,克服了单传感器信息的不确定性和片面性,提高了故障检测的准确度和可信度。
D-S证据理论;多传感器信息融合;故障检测
0 引言
柴油机作为一种重要的原动机,是现代船舶的重要动力源。柴油机及其监控系统是一个复杂的机电系统,涉及参数多种多样,如转速、温度、压力等,这些参数有些是自动控制柴油机正常工作所必须的,有些用于柴油机及其辅助系统监测报警和安全连锁保护,从不同侧面反映了柴油机特性及其监控系统的工作情况。一般柴油机监控系统中均安装有大量监测用传感器,用于监测柴油机及其辅助系统的工作状态,这些传感器通常都是对单一参数进行越界监测,但柴油机工作是一个复杂过程,在系统正常工作与出现故障之间存在一个中间状态,又叫临界状态或过渡状态,它反映了系统工作的不确定性和未知性。如何充分利用系统各传感器的信息,对柴油机的工作状态进行综合检测和评估,对于及时发现和排除故障以及故障隐患具有非常重要的意义。
多传感器信息融合技术是一种多源信息和数据综合处理技术,是指为完成所需要的决策和估计,利用一定的准则,将来自多传感器的信息和数据加以分析、综合,以便得出更为准确、可信的结论。多传感器信息融合技术克服了单传感器信息的不确定性和片面性,将其应用于故障检测领域,可以更有效地利用各种数据源的信息,提高故障检测的准确性和可信度。根据信息表征层次的不同,信息融合技术可以分为3个层次:数据层融合、特征层融合和决策层融合[1-2]。
D-S(Dempster-Shafer)证据理论不需要事件的先验概率,而是采用信任函数和似然函数作为区间的上下限来描述命题的可信度和不确定性,并采用区间估计的方法区分未知和不确定信息,是不确定性推理的重要方法[3-6]。本文利用D-S证据理论对安装于某型柴油机及其辅助系统上的众多传感器采集的信息进行融合,以此对柴油机的状态进行综合检测与评估,及时发现和排除故障,确保系统安全可靠运行。
1 D-S证据理论
D-S证据理论在概率的基础上对概率论的概念进行扩展,将概率论中的事件称为命题,事件的集合称为命题的集合,并通过基本概率分配函数、信任函数和似然函数等概念,建立命题和集合之间的对应关系,将命题的不确定性问题转化为集合的不确定性问题。
1.1 D-S证据理论的相关概念
D-S证据理论用“识别框架Θ”表示感兴趣的命题集,Θ的幂集,即Θ的所有子集构成的集合,记为2Θ。D-S证据理论的相关定义如下[6-9]:
定义1:基本概率分配函数 (BPAF)
若m是幂集2Θ到[0,1]的函数,即 m:2Θ→[0,1],满足如下2个条件:
①m(φ)=0,即不可能命题的基本概率值为0,其中φ为空集;
则称m为Θ上的基本概率分配函数。对∀A⊂Θ,m(A)称为A的基本可信度,表示对命题A的精确信任程度。
定义2:信任函数bel
定义 bel(A)= ∑B⊂Am(B),表示所获得的证据对命题A总的支持度。
定义3:似然函数pls
bel(A)和 pls(A)的关系为[6-9]:

命题A的不确定性用μ(A)表示,μ(A)=1-bel(A)-bel(¯A)=pls(A)-bel(A),表示既不信任A也不信任¯A的一种度量,可表示对命题未知的程度。
因为不确定性的存在,对∀A⊂Θ,有A∪¯A⊆Θ,因此有bel(A)≤pls(A)。
bel(A),pls(A)和μ(A)的关系如图1所示。

图1 bel(A),pls(A)和μ(A)的关系Fig.1 Relations among bel(A),pls(A)and μ(A)
1.2 D-S证据理论合成规则

2个基本概率分配函数的合成法则为[4-6]:

式中⊕表示直和运算。多个基本概率分配函数的合成满足直和的交换律和结合律,因此可由2个基本概率分配函数的合成递推得到多个基本概率分配函数的合成。
1.3 基本概率分配函数的构造
基本概率分配函数 (BasicProbability Assignment Function,BPAF)选取的好坏直接影响证据融合的效果和决策的准确性,而D-S证据理论中并没有给出BPAF的一般形式。目前,一般根据专家经验,人为设定的方式来构造基本概率分配函数[6-11]。
为避免基本概率分配函数构造过程中人为因素的影响,根据某型船用柴油机及其监控系统的工作特点,本文通过检测系统相关参数偏离正常值的程度来构造基本概率分配函数,并在此基础上对系统状态进行综合评估和故障检测。对系统任意参数v,设其额定值为v0,对应系统参数正常;极限值为vf,对应系统参数处于危险状态的极值,即系统处于故障状态。系统正常和故障之间通常含有中间过渡状态,即未知状态。参数的实际测量值与额定值之间的差值可以作为系统状态的判据,即实际测量值偏离额定值越大,则表明系统出现故障的可能性越大。

将测量值vt归一化后映射到区间 [0,2.576]上:

x越小,表示测量值vt越接近额定值v0,系统正常的可能性越大;x越大,表示测量值vt越偏离额定值v0,即越接近极限值vf,系统故障的可能性越大。
将系统的状态分为正常、未知和故障,设“正常”和“未知”之间的分界点为2.576×=0.8587,“故障”和“未知”之间的分界点为2.576×=1.717 3 。设命题 A={A1,A2,A3}={正常,未知,故障},那么,

Ai(x)(i=1,2,3)即为基本概率分配函数。
2 实例应用和分析
某型船用柴油机及其辅助管路中安装有大量压力传感继电器,主要用于对该型柴油机实施逻辑控制和各种安全连锁保护,而柴油机各管路的压力是随着柴油机转速的变化而变化,因此,不同转速下各管路对应的压力正常与否是监控系统能否对柴油机实施准确控制的关键。为了对该型柴油机的运行参数进行实时监测和故障检测,在柴油机及其辅助系统 (燃油、滑油、冷却水系统)的不同位置安装测试用压力传感器,实时采集柴油机辅助系统内不同管路、不同位置处介质的压力参数,并应用D-S证据理论对这些传感器采集的信息进行融合,以此对柴油机的工作状态进行综合评估和故障检测。
根据系统工作特点和现场安装条件,在冷却水系统、滑油系统和燃油系统中共安装有6个测试用传感器,分别安装在:冷却水系统:冷却水泵出口处和工作转速传感器入口处各1个;滑油系统:滑油泵出口处和滑油压降保护装置入口处各1个;燃油系统:燃油泵出口处和完全停车传感器入口处各1个。传感器采集的柴油机特征参数包括冷却水压力P11,冷却水压力P12,滑油压力P21,滑油压力P22,燃油压力P31,燃油压力P32,识别框架Θ={正常,未知,故障},即命题集 A={A1,A2,A3}={正常,未知,故障}。其中,Pi1和Pi2表示某一介质不同位置处的压力。
根据式(3)可得基本概率分配函数BPAF为

式中,i={1,2,3},j={1,2},分别代表柴油机 6个特征参数编号的组合,xij通过式(2)计算得到。令,

式中:Δxij1为特征参数Pij与第1个分界点(“正常”与“未知”的分界点)之间的相对距离。Δxij2为特征参数Pij与第2个分界点(“未知”与“故障”的分界点)之间的相对距离。
则式(4)即为
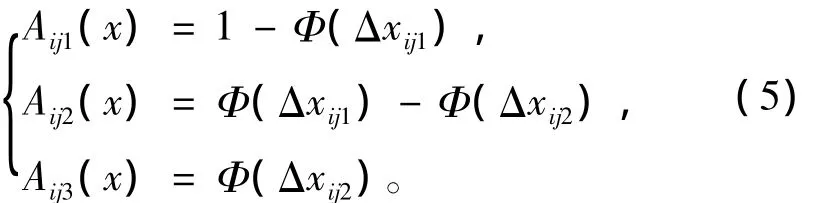
通过现场安装的6个压力传感器得到不同管路、不同位置处的压力特征参数值如表1所示。

表1 柴油机特征参数值Tab.1 Characteristic parameters of the diesel engine
根据式(5)计算可得每条证据(对应于每个传感器采集的信息)的基本概率分配函数BPAF,计算结果如表2所示。
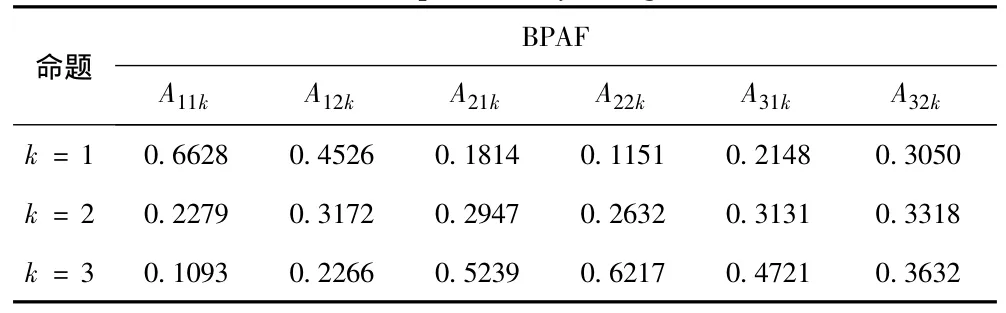
表2 基本概率分配函数Tab.2 The basic probability assignment function
表2中各参数的含义:k={1,2,3}对应3个命题集 {正常,未知,故障}。Aij1表示特征参数Pij对命题“正常”的支持度;Aij2表示特征参数Pij对命题“未知”的支持度;Aij3表示特征参数Pij对命题“故障”的支持度 (i={1,2,3},j={1,2})。
应用式(1)对表2所得的基本概率分配函数进行融合,融合结果如表3所示。其中,M12(Ck)是第1和第2个基本概率分配函数融合的结果;M123(Ck)是第1、2和第3个基本概率分配函数融合的结果;以此类推,M123456(Ck)是第1~6个基本概率分配函数融合的结果。

表3 数据融合结果Tab.3 Data fusion results
根据表3结果可得,所有证据融合后的基本概率分配函数为:M={0.363 6,0.005 4,0.631 0}。即命题A1(系统正常)的可信度为bel(A1)=0.363 6;命题A3(系统故障)的可信度为bel(A3)=0.631 0;命题A2(系统状态未知)的可信度为bel(A2)=0.005 4。
分析上述计算结果可知,应用D-S证据理论对多传感器采集的数据进行融合后所得结果为:系统故障的可信度大于系统正常的可信度,因此数据融合结论为系统故障,应采取必要措施对柴油机进行停机检查,排除相应的故障。
分析表1中的数据可知,造成系统故障的主要因素是滑油压力P22偏离正常值过大,即滑油管路中位置2(滑油压降保护装置入口处)的滑油压力过低;同时,滑油压力P21,即滑油管路中位置1(滑油泵出口处)的滑油压力偏低也是导致系统总体评判为故障的重要原因。经检查发现,该柴油机滑油压降保护装置的膜片老化破裂,存在滑油渗漏,从而使得此处滑油压力降低,更换膜片后恢复正常。另外,根据表1中的数据可知,各传感器信息进行融合之前,各个判据给出的系统状态未知的可信度分别为:0.227 9,0.317 2,0.294 7,0.263 2,0.313 1,0.331 8,应用D-S证据理论进行融合后,系统状态未知的可信度降低到0.005 4。可见,应用D-S证据理论对多传感器信息进行融合后,系统状态的未知度减小,从而提高了综合评判的准确度和可信度。
3 结语
将基于D-S证据理论的多传感器信息融合技术应用于某型船用柴油机状态监测评估和故障检测,通过现场采集系统参数,在此基础上应用概率统计的方法构造基本概率分配函数,克服了基本概率分配函数构造过程中人为因素的影响。实验证明,通过D-S证据理论进行信息融合,能综合利用各传感器信息,对系统状态做出准确判断,并降低被测对象的未知程度,提高了综合评判和故障检测的准确度和可信度,有效解决了某型船用柴油机实时状态监测和故障检测的不确定性问题。
[1]LLINAS J,HALL D L.An introduction to multi-sensor data fusion[C].Proceedings of the 1998 IEEE International Symposium on Circuits and Systems,1998(6):537 -540.
[2]PEROLS J,CHARI K,AGRAWAL M.Information marketbased decision fusion[J].Management Science,2009,55(5):827-842.
[3]DEMPSTER A P.Upper and lower probabilities induced by a multivalued mapping[J].Annals of Math.Statistics,1967,38:325 -339.
[4]SHAFER G.A mathematical theory of evidence[M].Princeton:Princeton University Press,1976.
[5]FRANCOIS J,GRANDVALET Y,DENEUX T,ROGER J M.Resample and combine:an approach to improving uncertainty representation in evidential pattern classification[J].Information Fusion,2003(4):75 - 85.
[6]薛昌友,李东鑫,马暄,等.基于D-S证据理论的潜艇多源信息融合系统[J].舰船电子工程,2008,28(11):22-25.
XUE Chang-you,LI Dong-xin,MA Xuan,et al.Multiresources data fusion system of submarine based on D-S evidential reasoning[J].Ship Electronic Engineering,2008,28(11):22 -25.
[7]侯新国,吴正国,夏立.基于D-S证据理论的感应电动机转子故障诊断方法研究[J].电工技术学报,2004,19(6):36-41.
HOU Xin-guo,WU Zheng-guo,XIA Li.Rotorfault diagnosis method of induction motor based on D-S evidentialtheory[J].TRANSACTIoNS ofCHINA Electrotechnical Society,2004,19(6):36 -41.
[8]CHEN Y,WANG G Y,CHEN L G,LI B.Research of script figure character recongnition algorithm based on fuzzy mathematics and D - S evidential theory[C].Control and Decision Conference,2009:1230 -1233.
[9]ZHAO P,MU X D,YI Z X,YIN Z R.Software-intensive equipment faultdiagnosisresearchbasedonD-S evidential theory[C].International Workshop on Knowledge Discovery and Data Mining,2009:523 -526.[10]夏阳,陆余良.D-S证据推理及算法实现[J].安徽大学学报(自然科学版),2004,28(6):20 -25.
XIA Yang,LU Yu-liang.The application of D - S evidence theory and algorithm implementation[J].Journal of Anhui University(Natural Sciences),2004,28(6):20 -25.
[11]王鸳君,魏云冰,王万良.基于D-S证据推理的水轮机调速器故障诊断[J].计算机与数字工程,2006,34(8):87-89.
WANG Yuan-jun,WEI Yun-bing,WANG Wan-liang.Fault diagnosis in hydraulic turbines based on D-S evidential reasoning[J].Computer and Digital Engineering,2006,34(8):87-89.
Research on fault detection method of diesel engine based on D-S evidential theory
SONG Zhen-hai1,PAN Xing-long1,HE Guo1
(1.Navy Submarine Academy,Qingdao 266042,China;2.College of Power Engineering,Naval University of Engineering,Wuhan 430033,China)
A method of multi-sensor information fusion is proposed based on D -S evidential theory,which is applied to fault detection of a certain marine diesel engine.At first,to avoid the negative effect of human factors and the system error,the basic probability assignment function(BPAF)is constructed by using probability statistics method based on field data acquisition.Then,the D -S evidential theory is applied to multi- sensor information fusion.Finally,this method is applied to fault detection of a certain marine diesel engine.The experiment results indicate that the problem of multi-sensor information fusion in the diesel engine fault detection is solved by using D -S evidential theory,and the human factors in constructing the basic probability assignment function and the uncertainty of single sensor information are avoided,and the accuracy and credibility are improved.
dempster-shafer evidential theory;multi-sensor information fusion;fault detection
TP274
A
1672-7649(2014)06-0106-05
10.3404/j.issn.1672-7649.2014.06.021
2013-06-17;
2013-12-06
宋振海(1966-),男,硕士,副教授,研究方向为轮机工程。
猜你喜欢
铁道通信信号(2020年9期)2020-02-06
汽车与新动力(2019年5期)2019-11-07
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13
汽车观察(2019年2期)2019-03-15
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2013年6期)2013-03-11
对联(2011年24期)2011-11-20
对联(2011年18期)2011-11-19
对联(2011年6期)2011-11-19