基于辐射控制的火控雷达网抗ARM效果仿真*
2014-07-11 01:05陈兴凯范振钦韩壮志
现代防御技术 2014年3期
陈兴凯,范振钦,韩壮志
(军械工程学院 电子与光学工程系,河北 石家庄 050003)
0 引言
火控雷达是现代防空系统中的重要组成部分,其主要功能是对目标进行跟踪,向火力单元提供目标位置信息。由于其工作时需要对目标进行持续照射,很容易被敌方侦察系统所截获,从而遭受到反辐射导弹(antiradiation missile,ARM)的打击。因此,如何提高现役火控雷达在战场上的抗ARM能力成为国内外研究热点之一。
目前,对于火控雷达抗ARM的研究有很多。通过设置有源诱饵[1-3]来诱偏ARM是一种提高雷达生存能力的有效措施之一,这种方法主要是在空间上达到抗ARM的效果;文献[4-5]通过雷达组网理论与间歇辐射理论相结合提高了火控雷达的低截获性能,从而延长了引导ARM的侦察设备对火控雷达信号的截获时间,从时间上达到了抗ARM的效果。本文通过将间歇开机和雷达组网的理论相结合,提出了火控雷达网的反侦察辐射控制策略与诱偏ARM的辐射控制策略,并且建立了相应的仿真模型,从时间和空间上验证了在辐射控制策略下,火控雷达网具有一定的抗ARM效果。
1 火控雷达网反侦察策略
雷达侦察[6]是雷达对抗中的重要部分,它不仅是获得雷达情报信息的主要手段,也是实施ARM攻击的基础和前提。一般只有在侦察系统截获雷达信号后,才会发射ARM进行攻击。所以,通过一定的反侦察策略来延长ARM发射时间,可以从时间上达到抗ARM的效果。
1.1 攻击作战下的任务需求
由于在侦察过程中,雷达方没有受到侦察方软硬杀伤的直接威胁,所以火控雷达在反侦察过程中,应该根据其攻击作战下的任务需求进行工作,即对目标进行有效跟踪。
火控雷达对目标的跟踪效果通常可以用跟踪精度[7]来描述。其数学模型可以描述为
tr(t)≤tr0,
(1)
式中:tr(t)为火控雷达t时刻的跟踪精度;tr0为有效跟踪的门限精度。
只有在满足式(1)的情况下,才认为火控雷达能够对目标进行有效跟踪,从而达到攻击作战下的任务需求。
1.2 反侦察辐射控制策略
随着国内外研究的不断成熟,很多技术手段都从单一向多层次、多手段、整体协同的方式发展,单部火控雷达也可以通过指挥控制系统的协同形成火控雷达网[8]。在火控雷达网中进行一定的辐射控制策略,可以灵活有效地提高现役火控雷达的反侦察效果。
本文从现役火控雷达的实际性能考虑,将间歇开机和雷达组网相结合,根据火控雷达跟踪目标的任务需求,控制火控雷达网内各个雷达的轮换工作状态,来提高其反侦察能力。具体辐射控制策略如图1所示。

图1 火控雷达网的辐射控制策略Fig.1 Radiation control strategy of fire-control radar network
由于本文研究重点为火控雷达网的辐射控制策略,所以图1中的各个火控雷达信号参数均为恒定的,并且采用脉冲重复周期(pulse repetition interval,PRI)不同的火控雷达。各雷达的PRI分别为PRI1,PRI2,…,PRIn且PRI1>PRI2>…>PRIn。显然,在不考虑其他参数的情况下,PRI越小,跟踪精度越高,但被侦察系统所截获的时间就越短;反之,PRI越大,跟踪精度越低,但被侦察系统所截获的时间就越长。
2 火控雷达网诱偏ARM策略
在雷达侦察系统截获到火控雷达信号后,可能会施行一系列的雷达对抗措施,如雷达干扰、ARM攻击等。其中ARM属于雷达对抗中的硬杀伤措施,它将直接破坏甚至摧毁所截获的雷达。目前的防空系统中也有将ARM进行火力拦截的防御措施,但随着ARM技术的越来越成熟,对ARM进行拦截的难度越来越高。从提高火控雷达生存能力的角度出发,可以通过一定的诱偏ARM策略来降低ARM的命中率,从空间上达到抗ARM的效果。
2.1 防御作战下的任务需求
当防空系统发现存在ARM直接威胁时,火控雷达应该根据防御作战下的任务需求进行工作,即保护自身一定范围内不遭受ARM的打击。
通常在不考虑高度因素的条件下,火控雷达防御作战下的任务需求可以描述为
(2)
式中:(x,y)为ARM在水平面上的落点坐标;(x1,y1),(x2,y2),…,(xn,yn)为雷达网内各雷达的水平面上的位置坐标;r为ARM的杀伤半径。
2.2 诱偏辐射控制策略
对ARM的诱偏通常都是设置有源诱饵,通过发射与雷达波形相同的信号,使ARM无法正确分辨出辐射源方向,从而追踪它们的功率中心。在雷达组网的情况下,多部雷达可以互为诱偏源,这样就不必另设诱饵源,以节省资源。但如果是网内雷达同时开机,还需要考虑网内各雷达在收发信号时是否存在同频干扰[9]。所以本文在火控雷达诱偏ARM时,依然采用间歇开机与组网的辐射控制策略。
根据火控雷达防御作战下的任务需求,理想的ARM诱偏落点位置如图2所示,其中R1,R2,…,Rn为各雷达的水平面位置,它们围成了一个几何图形,M为这个几何图形的几何中心,即为理想的诱偏落点。
图2 理想的诱偏落点Fig.2 Ideal location of ARM in decoying
由于在反侦察的辐射控制策略中,各雷达的PRI设置会有明显区别,为了将ARM诱偏至M点,就必须对各雷达的轮换工作时间进行有效的辐射控制。在各雷达信号的载频、脉宽等参数基本相似的情况下,若PRI1>PRI2>…>PRIn,则各雷达的轮换工作时间比应该满足PRI1∶PRI2∶…∶PRIn。即PRI小的雷达轮换工作时间应该短一些,PRI大的雷达轮换工作时间应该长一些,并且如果要诱偏至几何中心处,就必须按照相应的比例进行轮换工作。
3 仿真建模
为了验证火控雷达网在上述辐射控制策略下的抗ARM效果,分别对侦察系统截获雷达信号和ARM追踪雷达信号的过程进行仿真建模。
3.1 侦察系统截获信号模型
侦察系统对雷达信号的截获主要体现了侦察设备前端发现和检测雷达信号的能力。侦察设备的截获判断条件,可以考虑以下几个主要因素[10-11]:信号能量特性、空域特性、频域特性和时域特性。当4个因素全部满足截获条件时,即可判断侦察系统可以截获所侦测的雷达信号,否则不能截获。对于火控雷达而言,由于工作时要对目标进行持续照射,并且其作用范围较警戒雷达小了很多,这样就基本可以认为能量和空域上一直被截获。所以侦察系统对于火控雷达的截获判断主要是时域和频域的截获判断。
以典型的搜索式超外差侦察接收机为例,时频域截获的表述如图3所示,图中(fmax-fmin)为频率搜索范围,Tf为频率搜索周期,PRI为雷达信号的脉冲重复周期,τ为脉冲宽度。

图3 时频域截获示意图Fig.3 Sketch of the time-frequency domain interception
只有在信号到达侦察设备的频域截获条件时,才能判定为时频域截获。即在脉宽有效时有
fr-f0≤Δf/2,
(3)
式中:fr为信号载频;f0为侦察搜索时的中心频率,其取值在频率搜索范围内;Δf为测频带宽。
3.2 ARM追踪信号的飞行模型
ARM在追踪目标雷达信号的飞行过程中,主要是靠自身的导引头对信号进行方位的量测,然后对飞行方向进行调整[12]。在不考虑外界因素的影响下,ARM的导引飞行方向控制过程如图4所示。
图4 ARM导引飞行方向控制Fig.4 Flight direction control of ARM
当导引头连续2个时刻的测量方向变化角度未达到临界分辨角时,ARM的飞行方向变化如图5所示。其中Pt(xt,yt,zt)为ARM在t时刻的位置,PtMt为t时刻的飞行方向,PtNt为导引头t时刻的量测方向;Pt+1(xt+1,yt+1,zt+1)为ARM在t+1时刻的位置,Pt+1Mt+1为t+1时刻的飞行方向,Pt+1Nt+1为导引头t+1时刻的量测方向。
图5 ARM飞行方向变化Fig.5 Flight direction change of ARM
随着ARM不断靠近辐射源,当导引头连续2个时刻的量测方向变化角度大于临界分辨角时,即分辨出了2部或2部以上的雷达信号,ARM就会随机选择一个辐射源进行追踪。但此时ARM调整的高度有限,将极大地限制ARM命中目标。当k时刻ARM的位置信息中zk=0时,即可获得ARM在水平面上的落点坐标(xk,yk)。
4 仿真结果
根据仿真模型,整个仿真流程如图6所示。

图6 仿真流程图Fig.6 Flow chart of simulation
由于2部雷达组网控制灵活性较低,4部或4部以上雷达数目过多,在组网控制策略下会有冗余,所以雷达个数选取为3个。3部雷达1,2,3取不同的脉冲重复周期PRI,分别为1,5和10 ms,信号载频fr和脉宽τ分别取相同值9 GHz和5 μs,跟踪时的门限精度tr0为8 m,间歇开机最短工作时间为100 ms。根据诱偏对雷达之间的安全距离要求,设置3部雷达成等边三角形分布,其水平面上的坐标分别为(0,0),(-150,-260),(150,-260),单位均为m。
ARM载机的侦察系统频率搜索范围(fmax-fmin)为5~15 GHz,频率搜索周期Tf为2 ms,测频带宽Δf为10 MHz,搜索中心频率f0初始值随机。载机航迹方程为
(4)
航迹初始值为x0=15 km,y0=10 km,z0=6 km。
当截获到雷达信号后,即发射ARM,此时载机航迹反向。ARM导引头采样周期步长设为1 ms,最大飞行Ma为3,临界分辨角为10°,杀伤半径为30 m。
进行1 000次的蒙特卡罗仿真,即火控雷达网与敌方ARM载机进行了1 000次的对抗,火控雷达网对ARM诱偏落点的时空分布情况如图7所示。
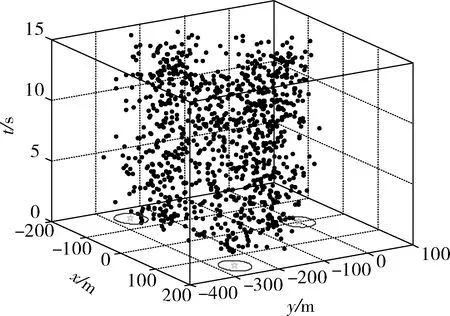
图7 落点时空分布图Fig.7 Time and spatial distribution map of locations
只考虑空间下的诱偏落点时,如图8所示。从图中可以统计出ARM的落点共有1 000个,其中造成杀伤的落点有104个。
由于火控雷达攻击作战时间一般不会很长,不妨设攻击作战时间为10 s,即在10 s内火力单元已向ARM载机实施了火力打击。则可以认为在杀伤范围内超过10 s的落点为无效落点。在考虑时间上的因素后,去除10 s以上的落点,其空间分布如图9所示。从图中可以统计出ARM的落点共有729个,造成杀伤的落点仅有67次。
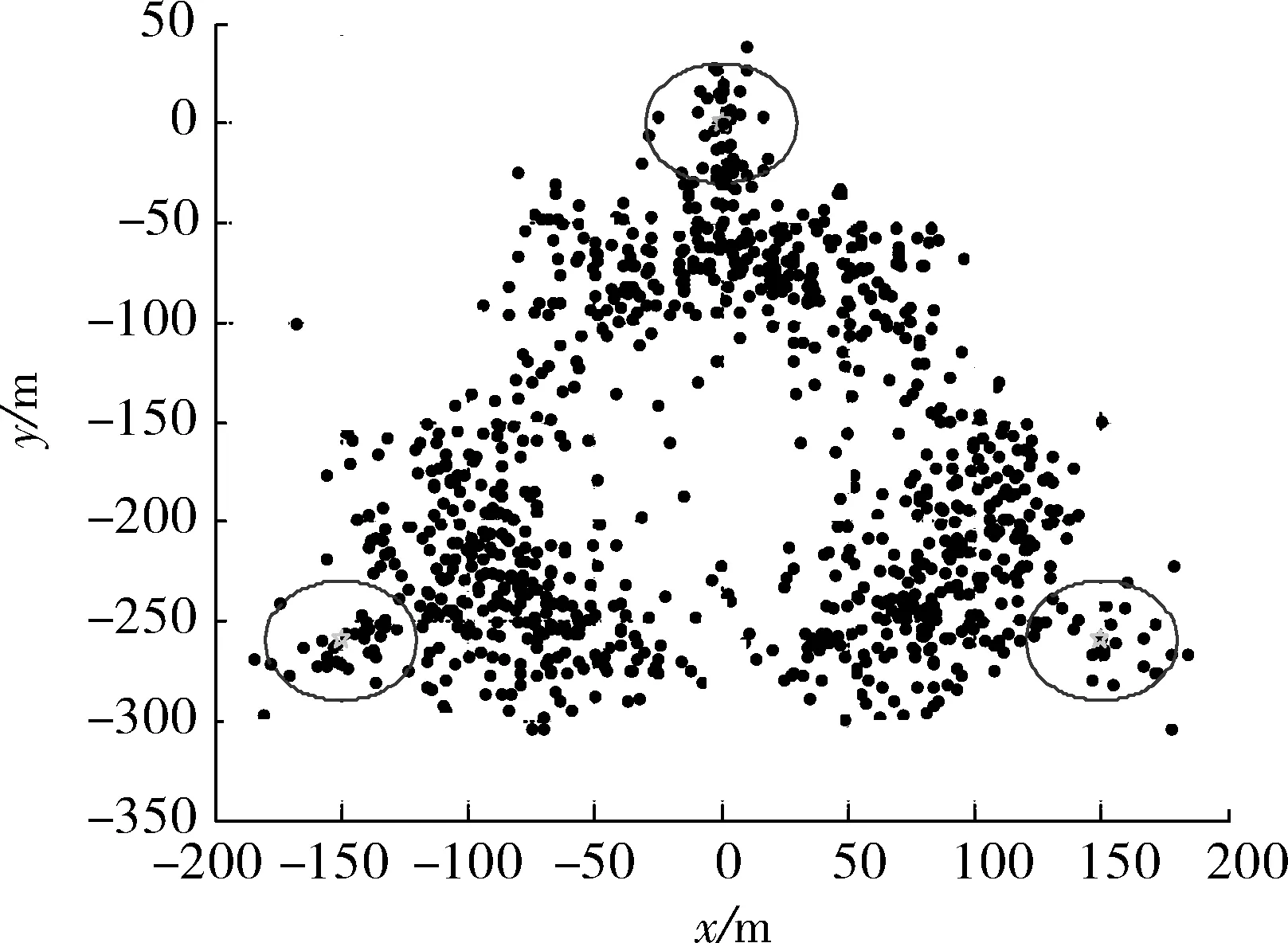
图8 落点空间分布图Fig.8 Spatial distribution map of locations

图9 去除无效点后的落点空间分布图Fig.9 Spatial distribution map of locations without invalids
从上述仿真结果可以看出,在1 000次的对抗中,火控雷达网对ARM导弹的空间诱偏效果良好。在考虑时间因素的情况下,去除无效攻击时间的落点后,火控雷达网的抗ARM效果有进一步的提高。
5 结束语
本文从提高现役火控雷达抗ARM能力的需求出发,将时间和空间上的抗ARM方法相结合,分别提出了火控雷达网反侦察和诱偏ARM的辐射控制策略。通过建模仿真,验证了火控雷达网抗ARM的有效性。由于本文主要是研究辐射控制的方法策略,所以仿真中的模型参数选取简单,仿真结果也是针对所选取的各个参数。如果对应参数有所变动,仿真结果也会随之变化,但辐射控制策略是通用的,对提高和研究现役火控雷达的战场生存能力有一定的参考价值。在今后的研究工作中还会加入更真实的环境因素,从而获得更加准确真实的研究结果。
参考文献:
[1] 高山, 曹泽阳, 雷鹏. 防空导弹抗ARM诱骗系统布站研究[J]. 战术导弹技术, 2009, 5(3): 48-53.
GAO Shan, CAO Ze-yang, LEI Peng. Research on Decoy Deploy System for Air Defense Missile Against ARM [J]. Tactical Missile Technology, 2009, 5(3): 48-53.
[2] 张世文, 王明宇, 田海林. 抗ARM定向诱偏系统设计与分析[J]. 现代雷达, 2010, 32(12): 11-13.
ZHANG Shi-wen, WANG Ming-yu, TIAN Hai-lin. Design and Analysis of Counter-ARM System Based on Directional Decoy [J]. Modern Radar, 2010, 32(12): 11-13.
[3] 李秀金, 马彦恒, 刘静, 等. 雷达诱饵抗ARM技术研究[J]. 计算机测量与控制, 2012, 20(1): 129-131.
LI Xiu-jin, MA Yan-heng, LIU Jing, et al. Study of Technology of Radar Decoy in Antagonizing ARM[J]. Computer Measurement & Control, 2012, 20(1):129-131.
[4] 熊久良, 徐宏, 韩壮志, 等. 一种基于跟踪精度控制的组网火控雷达抗ARM方法[J]. 电讯技术, 2011, 51(4): 21-25.
XIONG Jiu-liang, XU Hong, HAN Zhuang-zhi, et al. A Method for Fire-Control Radar Network Against ARM Based on Tracking Accuracy Control[J]. Telecommunication Engineering, 2011, 51(4): 21-25.
[5] 杨小龙, 李成玉, 韩壮志, 等. 组网火控雷达抗ARM跟踪技术[J]. 计算机测量与控制, 2012, 20(8): 2174-2176.
YANG Xiao-long, LI Cheng-yu, HAN Zhuang-zhi, et al. Antagonizing ARM Target Tracking Technology of Netted Fire-Control Radar[J]. Computer Measurement & Control, 2012, 20(8): 2174-2176.
[6] 唐永年. 雷达对抗工程[M]. 北京: 北京航空航天大学出版社, 2012.
TANG Yong-nian. Radar Countermeasures Engineering [M]. Beijing: Beihang University Press, 2012.
[7] 熊久良, 徐宏, 韩壮志, 等. 一种面向抗ARM作战的火控雷达目标跟踪[J]. 现代防御技术, 2011, 39(4): 155-158.
XIONG Jiu-liang, XU Hong, HAN Zhuang-zhi, et al. A New Target Tracking Method of Fire Control Radar Facing ARM [J]. Modern Defense Technology, 2011, 39(4): 155-158.
[8] 陈永光, 李修和, 沈阳. 组网雷达作战能力分析与评估[M]. 北京: 国防工业出版社, 2006.
CHEN Yong-guang, LI Xiu-he, SHEN Yang. Capability and Evaluation of Netted Radar [M]. Beijing: National Defense Industry Press, 2006.
[9] 郇浩, 陶然, 李元硕, 等. 基于变换域和时域联合处理的雷达同频干扰抑制方法[J]. 电子与信息学报, 2012, 34(12): 2978-2984.
HUAN Hao, TAO Ran, LI Yuan-shuo, et al. Co-Channel Interference Suppression for Homo-Type Radars Based on Joint Transform Domain and Time Domain[J]. Journal of Electronics & Information Technology, 2012, 34(12): 2978-2984.
[10] 赵国庆. 雷达对抗原理[M]. 西安:西安电子科技大学出版社, 1999.
ZHAO Guo-qing. Radar Countermeasures Principles [M]. Xi’an: University of Electronic Science and Technology Press, 1999.
[11] Richard G Wiley. ELINT: The Interception and Analysis of Radar Signals [M].Norwood,USA:Artech House Inc, 2006.
[12] 徐宏, 尚朝轩, 韩壮志, 等. 组网火控雷达抗反辐射导弹的闪烁诱偏方法[J]. 系统工程与电子技术, 2011, 33(5): 1146-1150.
XU Hong, SHANG Chao-xuan, HAN Zhuang-zhi, et al. Blinking Decoying Method for Countering Anti-Radiation Missiles in Fire-Control Radar Network [J]. Systems Engineering and Electronics, 2011, 33(5): 1146-1150.
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
成都信息工程大学学报(2021年1期)2021-07-22
空间科学学报(2021年6期)2021-03-09
消费导刊(2018年10期)2018-08-20
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
火控雷达技术(2016年1期)2016-02-06